

5.4. Клапанные гидрораспределители
В гидросистемах некоторых машин применяют также клапанные распределители, которые просты в изготовлении и надежны в эксплуатации, а также могут обеспечить высокую герметичность.
Затвора клапанов приводят в действие ручными, механическими и электротехническими устройствами. Из ручных устройств наиболее распространены клапаны с качающимся рычагом, схема которого для питания одной полости гидродвигателя приведена на рис.5.10, а.
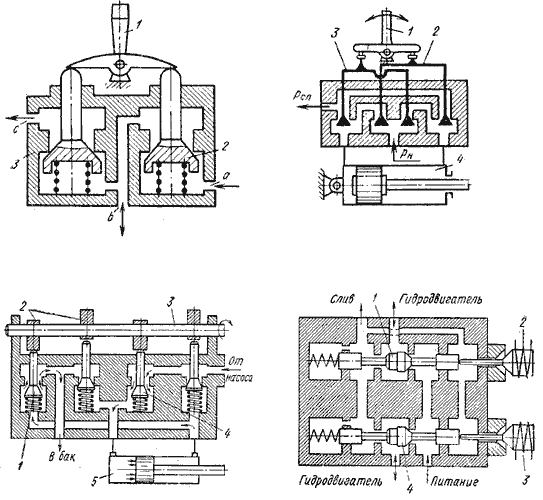
Рис.5.10. Клапанные распределители: а, б - с качающимся рычагом; в - с кулачковым приводом; г - с электромагнитным приводом
В клапанном распределителе (см.рис.5.10, а) в нейтральном (среднем) положении качающегося рычага 1 оба клапана 2 и 3 находятся в своих гнездах; в этом положении клапанов канал b гидродвигателя отсоединен как от канала a, связанного с насосом, так и от канала c, связанного с баком. При повороте рычага 1 вправо с гидродвигателем соединяется канал a насоса, при повороте влево - канал c бака.
Схема четырехходового клапанного распределителя представлена на рис.5.10, б. При повороте рукоятки 1 перемещается та или другая пары клапанов 2 или 3, обеспечивая подвод (отвод) жидкости к соответствующей полости силового цилиндра 4.
Распространены также клапаны с кулачковым приводом (рис.5.10, в). На валике 3 находятся четыре кулачка 2, соответствующим образом ориентированные один относительно другого. При повороте валика кулачки воздействуют на штоки соответствующего конусного затвора 1, обеспечивая подвод рабочей жидкости в полости илового цилиндра 5 и ее отвод. В положении, показанном на рассматриваемом рисунке, жидкость от канала, связанного с насосом, поступает через открытый (утопленный) затвор 4 в левую полость силового цилиндра 5 и удаляется в бак из правой полости цилиндра через клапан. Остальные два затвора находятся в своих седлах. При повороте валика вступают в действие эти затворы, обеспечивая подвод жидкости в правую полость цилиндра 5 и отвод ее из левой полости.
На рис.5.10, г представлена схема трехпозиционного клапанного распределителя прямого действия с двумя клапанами 1 и 4, управляемыми электромагнитами 2 и 3. При выключенных электромагнитах оба клапана прижаты пружинами к своим седлам. При этом магистраль нагнетания перекрыта, а полости гидродвигателя соединены со сливом.
При включении электромагнита 2 клапан 1, сжимая пружину, переместится в крайнее левое положение и прижмется к левому седлу. В этом положении одна из полостей потребителя соединится с напорной магистралью. При включенном электромагните 3 и выключенном электромагните 2 сработает клапан 4, соединив вторую полость потребите
Основы теории электропривода
1. Основные понятия и классификация электроприводов
Электроприводом называется электромеханическое устройство, предназначенное для преобразования электрической энергии в механическую энергию вращательного, либо поступательного движения и включающее электромеханический преобразователь (двигатель) и устройство управления двигателем.
В общем случае ЭП включает преобразователь П, электромеханический преобразователь (электродвигатель) ЭМП(Д), рабочий механизм РМ, устройство (или устройства) обратной связи У ОС, суммирующий узел СУ. Преобразователь П, устройства обратной связи УОС и суммирующий узел СУ образуют устройство управления УУ. В зависимости от типа ЭП в УУ могут входить и другие элементы управления.
Преобразователь П предназначен для преобразования напряжения сети Uсети в напряжение Uup другой частоты и величины, напряжение той же частоты и переменной величины, постоянное напряжение, изменяющееся по величине, и др. Это напряжение подается на ЭМП (Д), который, развивая на валу вращающий момент M, непосредственно или через передаточное устройство приводит в движение (вращательное или поступательное) рабочий механизм РМ с моментом сопротивления Мс.
УОС служит для контроля, измерения и последующего учета ЭП регулируемой величины (на рис. 1 - частоты вращения ω).
УС осуществляет функцию суммирования задающего напряжения Uзап и напряжения обратной связи по частоте вращения или иной величине Uoc. Результирующее напряжение управления Uрез равное разности между задающим напряжением и напряжением обратной связи, определяет выходные параметры преобразователя и, следовательно, скорость вращения двигателя.
Рис.
1
Вариант
блок-схемы электропривода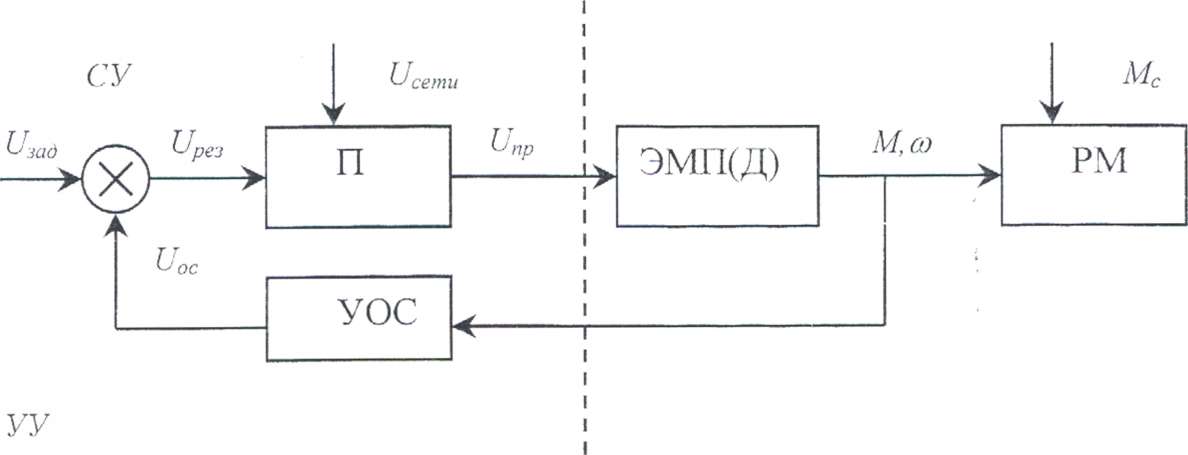
Классификация электроприводов
В соответствии с ГОСТ - 16593 ЭП классифицируются по следующим характеристикам:
По количеству и связи исполнительных, рабочих органов.
1. Индивидуальный, в котором рабочий исполнительный орган приводится одним самостоятельным двигателем, приводом.
Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органон одной РМ.
Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
Но типу управления и задаче управления.
Автоматизированный ЭП, управляемый путем автоматического регулирования параметров и величин.
Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
Следящий ЭП, автоматически отрабатывающий перемещение исполни тельного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения.
ЭП с вращательным движением.
Линейный ЭП с линейными двигателями.
Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства.
1. Редукторный ЭП с редуктором или мультипликатором.
Электрогидравлический с передаточным гидравлическим устройством.
Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока.
1. Переменного тока.
2. Постоянного тока.
По степени важности выполняемых операций.
Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
Вспомогательный ЭП.