

Список учебной литературы:
Мехатроника – Пер. с япон./Исии Х., Иноуэ Х., Симояма И. и др. — М.: Мир, 1988. — С. 318. — ISBN 5-03-000059-3
Мехатроника: основы, методы, применение. – Подураев Ю.В. – М.:Машиностроение, 2006. – С. 256.
Электротехнические и мехатронные системы. – Карнаухов Н.Ф. – Феникс, 2006. – С. 320. – ISBN 5-222-08228-8
Гидравлические и пневматические системы. – Схиртладзе А.Г. – М.:Станкин, 2003. – С.544.
Теория и проектирование гидро- и пневмоприводов. – Навроцкий К.Л. – М.:Машиностроение, 1991. – С.384.
Гидравлические и пневматические приводы промышленных роботов и автоматических манипуляторов. – Крейнин Г.В. и др. – М.:Машиностроение, 1993. – С.304.
Расчет пневмоприводов. Справочное пособие. Библиотека конструктора. – Герц Е.В., Крейнин Г.В. – М.:Машиностроение, 1975. – С.272.
Механика гидро- и пневмоприводов. – Попов Д.Н.- М.:МВТУ, 2001. С.320.
Общая информация
Свойства всякой системы описываются ее связями с окружающей средой, ее структурой, т.е. ее элементами и их взаимосвязью, а также могут быть охарактеризованы ее работой
Типичные внешние воздействия на ЭП (Z):
-силы, вращающие моменты и моменты инерции рабочей машины,
-напряжения и чистота главной и вспомогательной питающих сетей;
-интенсивность, электростатических и электромагнитных полей, действующих на систему ЭП;
-механические силы как источник циклической, вибрационной и ударной нагрузки;
-климатические факторы t окружающей среды, атмосферное давление, влажность воздуха, воздействие воды;
-концентрация химических загрязнений воздуха, вызывающих коррозию;
Выходные величины
X - зависимые переменные - линейные и угловые перемещения,
частоты вращения, ускорения, ток двигателя.
V - несут информацию о рабочем состоянии и готовности к эксплуатации всей системы или ее элементов
побочные эффекты:
механические - колебания, вибрация, вихревые воздушные потоки; акустические - шум, помехи;
тепловые –теплота энергии потерь;
опасность для человека электрических и механических, воздействий пожаро-взрывоопасность.
Излучение электромагнитных полей;
Эти воздействия во многом определяют условия эксплуатации ЭП и в конечной мере и проектирования их (инструкции, стандарты, предписания)
Общие требования к приводу
Надежность как и любой технический объект, привод обязан выполнять заданные функции в оговоренных условиях в течение определимого промежутка времени. Если это не обеспечено, все остальные его качества окажутся бесполезными. Надежность нужно рассматривать как неотъемлемое свойство системы, закладываемое на самых первых стадиях проектирования и обеспечиваемое в процессе ее создания и эксплуатации.
Точность - отнесем к главной функции привода - осуществлять управляемое движение. Если функция привода- воспроизводить какую-либо траекторию движения, то обязательно существует коридор вокруг воспроизводимой тра-ектории, из которого нельзя выходить и т.д.
Быстродействие_- способность системы достаточно быстро реагировать на различные воздействия.
Качество динамических процессов - обеспечение закономерностей их протекания во времени.
Энергетическая эффективность.— показатель, ставший особенно существен-ным в последнее время. Применительно к электропроводу этот показатель варьируется удельным расходом электроэнергии на получение конечного технологического результата
Часто энергетическую эффективность оценивают К1ТЦ - отношением полезно истраченной энергии к ее полному расходу в данном процессе.
Совместимость электропривода с системой электроснабжения и информационной системой более высокого уровня.
Ресурсоемкость - материалоемкость и энергоемкость, заложенные в конструкцию
и технологию производства, трудоемкость при изготовлении, монтаже, наладке, эксплуатации, ремонте.
Функции выполняемые приводом
Привод предназначен для приведения в движение рабочих органов машин и механизмов и его функции полностью определяются тем техническим процессом, в котором задействованы эти машины и механизмы.
Пуск, реверсирование и торможение рабочих органов
Регулирование частоты вращения и ускорения
Обеспечение заданного натяжения (троса, полосы металла, бумаги, полотна, ленты )
Согласование движения нескольких исполнительных органов (экскаватор, металлорежущий станок . робот- манипулятор, мостовой кран)
Обеспечение движения по заданной траектории ( инструмент станка, схват манипулятора, антенна локатора), режим слежения
Оптимизация режима работы всего технологического процесса
Адаптация к изменению параметров как технологического процесса, так и самого привода
Обеспечение защиты от аварийных режимов , блокировок, диагностики
Комплексная автоматизация
Классификация приводов
По виду движения – вращательные, поступательны, возвратно-поступательные , реверсивные, нереверсивные
По принципам регулирования координат – нерегулируемые, регулируемые, следящие, программные , адаптивные, позиционные, стабилизирующие.
По роду передаточного устройства – редукцией, т.е. с изменением частоты вращения при помощи механических устройств и без редукции , т.е. вал соединен непосредственно с рабочим органом.
По виду преобразовательного устройства –вентильные, электромашинные, электромагнитные.
По способу передачи механической энергии – индивидуальные , групповые, взаимосвязанные.
Тенденции развития приводов
Приближение источника движения к исполнительному органу
Использование специальных двигателей
Совершенствование элементной базы
Расширение функций
Увеличение объема информации для управления
Развитие цифрового и микропроцессорного управления
Создание комплектных приводов
Гидравлические и пневматические приводы мтс
ГП и ПП – известны давно, широкое применение в 20 веке. В машиностроении – МРС – фиксация, зажим, сборка, кантование, упаковка, перемещение.
ГП – основные достоинства – компактность, малая масса, высокий статический и динамический характер, малые затраты на управление.
Гидроцилиндр диаметром 105 мм, давление 25МПа, сила 120кН. Минусы: сложность источника питания, пожароспособность.
С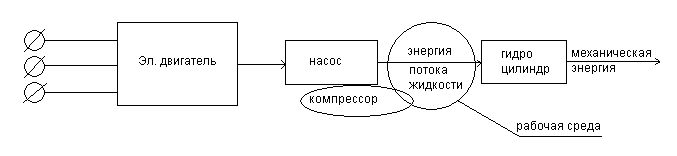 хема
ГП
хема
ГП
Рабочая среда в ГП – жидкость или физическое тело, способное под действием малых сил изменять свою форму, но не менять объем.
Газ меняет форму и объем.
Идеальная жидкость (используется при расчетах) – несжимаемая, нерасширяемая, без сил внутреннего трения.
Рабочая жидкость – основной элемент в ГП.
Функции: передача энергии, управление процессом передачи, смазка, антикоррозийные свойства.
Требования к ней: малое изменение вязкости в широком диапазоне температур, большой модуль упругости, химическая стабильность, сопротивление вспениванию, малая способность к расширению в воздухе, большая удельная теплоемкость, нетоксичность.
Свойства РЖ меняются в процессе эксплуатации из-за воздействия температуры, давления, скоростей. До 70% отказов ГП из-за нарушения свойств РЖ.
В объемах ГП и системах гидроавтоматики используются следующие РЖ: минеральные масла, вода, водные эмульсии, синтечиские рабочие жидкости, жидкие металлы и их смеси (77% Na + 23% K).
МГ – масло гидравлическое; И – инструментальное масло; МГЕ – для моб. объектов; АМГ – авиационное; ТП – турбинное; НГЖ, П20, ПГВ – синтетические масла
Свойства РЖ корректируются специальными присадками.
Характеристики РЖ
Плотность ρ (кг/
 )
– масса единицы объема. Применяют также
удельный вес рабочей жидкости
γ= ρ*g.
На практике относительная плотность
(относительный удельный вес) – отношение
плотностей РЖ и плотности дистиллированной
воды при t=4
̇C
и нормальном атмосферном давлении. У
минеральных масел С=870-940 кг/
.
Мера инерционности РЖ – С определяет
сопротивление перемещению РЖ с различными
ускорениями.
)
– масса единицы объема. Применяют также
удельный вес рабочей жидкости
γ= ρ*g.
На практике относительная плотность
(относительный удельный вес) – отношение
плотностей РЖ и плотности дистиллированной
воды при t=4
̇C
и нормальном атмосферном давлении. У
минеральных масел С=870-940 кг/
.
Мера инерционности РЖ – С определяет
сопротивление перемещению РЖ с различными
ускорениями.Вязкость – свойство РЖ сопротивляться деформации сдвига или скольжения ее слоев. Механизм возникновения вязкости связан с тем, что при движении внутри трубы отдельные слои РЖ двигаются с различными скоростями. Наружные слои тормозятся о стенки (большой коэффициент трения). Мерой вязкости среды служит динамическая вязкость µ или связанная с ней кинематическая вязкость ν, µ = ρ*ν. Динамическая вязкость – сила трения приходящаяся на единицу поверхности соприкасающихся слоев жидкости [µ]=Па*с. Основные параметры ГП оценивают при работе на минеральном масле вязкостью 30-35 сСт. Вязкость уменьшается с повышением t и p. Сжимаемость РЖ – свойство изменять свой объем под действием давления.. наличие сжимаемости РЖ в гидросистеме снижает КПД и ухудшает режим работы. Оценивают сжимаемость по коэффиценту объемного сжатия β=∆V/(∆p*V). Еж=1/β= -V₀(∆p/∆V) – объемный модуль упругости зависит от типа жидкости, действующей температуры, давления (Еж= 1350-1700МПа). Наличие пузырьков воздуха в РЖ (или растворенного воздуха) снижает Еж. Сжимаемость масла в гидроцилиндрах больших размеров при работе с малыми подачами приводит к заметному запаздыванию начала движения исполнительного механизма и рывкам в направлении подачи при резком снятии нагрузки.
Тепловое расширение РЖ – свойство изменять объем с повышением температуры. Определяется коэффицентом объемного расширения (к¯¹) α=∆V/(V₀*∆T), где V₀ - начальный объем, ∆V – приращение объема, ∆T- приращение t в К. Минеральные масла при p=0…15МПа и α=(6…7)*10¯⁴ к¯¹. Удельная теплоемкость РЖ – количество теплоты необходимое для нагрева 1кг жидкости на 1К учитывается через коэффициент удельной теплоемкости Сут=Q/(m*∆T). Удельная теплоемкость минеральных масел Сут=1,88-2,1 кДж/(кг*К), λ=0,136 Вт/(М₀*⁰С).
Температура застывания – это t, при которой РЖ застывает на столько, что при наклоне пробирки с РЖ на угол 45⁰, ее уровень остается неизменным в течение одной минуты. Температура вспышки – это t, при которой пары РЖ образуют в смеси с воздухом горючую смесь. Растворимость в воздухе – объем газа, который может раствориться в РЖ, Vв =nв*V(P₀/P₁), где nв – коэффициент растворимости воздуха (для индустриальных масел n=0.076, трансф. масла n=0.083, АМГ-10 n=0,104 все при t=20⁰С)
Выбор РЖ
Выбирается по основным физико-химическим свойствам: плотность, вязкость, теплопроводность, сжимаемость и т.д.
В особых случаях представляется требование к огнестойкости РЖ и пригодности к работе в широком диапазоне температур. Тип РЖ определяет КПД, надежность, долговечность, вес, мощность, инерционность привода.
Методика выбора
РЖ выбирается по требуемой вязкости гидросистемы станков (МРС) – ИГП-18, ИГП30, 38; гидросистемы прессов турбинные – T22, T46, ТКП22; гидросистемы самолетов – АМП0.
РЖ должна иметь высокие модуль упругости и значение температуры вспышки и замерзания (tв=160-180⁰С, tз=15-30⁰С)
РЖ должна обладать антикоррозионными и смазывающими свойствами.
РЖ должна иметь низкую токсичность и невысокую стоимость.
Неправильный выбор РЖ и эксплуатации ведут к выходу из строя и ненормальным режимам ГП.
Принцип работы гидропривода и пневмопривода
ГП ( ПнП) –широко применяются во многих МТС - промышленные роботы , МРС , автоматические линии , механизмы технологического оборудования.
Объемный ГП (ПП) – его принцип действия базируется на объемном вытеснении рабочей жидкости ( РЖ ) , высокой жесткости жидкости и на законе Паскаля.
Б .
Паскаль (1623 -1662)
.
Паскаль (1623 -1662)
Давление внешних сил на поверхность действует во всех направлениях
1 Па = 1 н / 1 м^2
Движущаяся жидкость обладает тремя видами энергии:
- энергией положения ( потенциальной ) –уровень подъема жидкости (ГЭС)
- кинетической энергией скоростного напора – движения жидкости.
- энергией давления – используется в ГП объемного действия .
Последняя энергия легко преобразуется в механическую в ГП объемного действия.
Гидравлические и механические приводы мехатронных систем
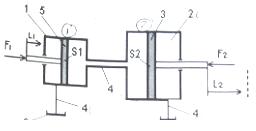
Краткое описание рисунка: Гидроцилиндры 1 и 2, поршни, трубопроводы, штоки, баки
Гидроцилиндр №1
Гидроцилиндр №2
Поршень 2
Трубопровод
Поршень 1
Бак для хранения и сбора рабочей жидкости
Схема данного простейшего объемного гидропривода принимает во внимание нулевые утечки РЖ.
Для перемещения L2 поршня №3 цилиндра №2 при воздействии на шток силы F2 необходимо выполнить работу:
A = F2*L2
При этом в левую полость цилиндра №2 надо подать объем РЖ:
W= S2*L2 под давлением p,
вызванных действием силы F2, т.е. p= F2/S2 этот объем совершит работу:
A=p*W=p*S2*L2=F2*L2
Необходимый объем W при необходимой плотности c будет иметь массу:
m=c*S2*L2.
Для получения удельной энергии давления разделим A на m.
![]()
Для того чтобы подать рабочую жидкость в гидроцилиндр 2 , нужно привести в движение поршень 5 гидроцилиндра 1 под действием силы F1, тогда жидкость перетечет из правой части 1 в левую часть 2. Поршень 5 гидроцилиндра 1 вытеснит объем РЖ при перемещении его на L1.
W=S1*L1=S2*L2
Таким образом видно, что ход поршня 3 гидроцилиндра 2 зависит от соотношения эффективных площадей S1 и S2 т.е.
![]()
По
закону Паскаля давление p
в гидроцилиндрах одинаково: ![]()
Имеем зависимость:
![]()
Если принять, что S1<S2, то поршень 3 гидроцилиндра 2 может развивать F2>F1, что используется как мультипликационный принцип в гидроусилителях, в гидропрессах. Для оценки этого эффекта используют коэффициент мультипликации ( силы )
![]()
Мощность развиваемая ГП (без потерь и утечек ) :
![]()
Q –поток РЖ, л/мин, p- давление.
Классификация ОП (объем привод)
ОП (гидро или пневмо) – отличаетмя от приводов других типов гидросистемой (или пневмосистемой) в которую входит один или несколько оъемных гидро или пневмодвигателей.
Объемный привод – жидкость или газ под давлением изменяют объем камер двигателя, вызывая движение раб.объема.
Динамический привод – действие потока жидкости или газа на рабочий орган (турбина) – применяются реже.
С
Управляющий
орган
Объемный
привод
Рабочий
орган
____________ ___________
Ручное автоматическое управление
Обобщенная величина |
Поступательное движение |
Вращательное движение |
У - перемещение |
L [m] (s) |
ф [rad] |
V – скорость |
Y [m/s] |
W [rad/s] угловая |
H – воздействие (дин.величина) |
F [H] – сила |
M [H*M] момент силы |
σ - инерция (гравитация) |
M [kg] масса |
J [H*M2] момент инерции |
В зависимости от задачи управление:
Стабилизирующее – скорость на выходе постоянна
Программные – скорость изменяется по программе
Следящие – закон изменения скорости заранее неизвестен (известны пределы)
По характеру движения выходного звена ОП:
Поступательное
Вращательное
Поворотное
По источнику подачи рабочей среды (РС) подразделяют:
Насосные (компрессорные)
Аккумуляторные
Магистральные
По способу управления ОП подразделяют:
Дроссельные – при помощи регулирующего гидроаппарата (пневмо)
Магнитные – при помощи регулирования частоты вращения двигателя, насоса или компрессора
Комбинированные – дроссельные + магнитные
По изменению сигнала управления – непрерывные и дискретные
По наличию ОС – замкнутые и разомкнутые
По виду движения – поступательные, неполноповоротные и с неограниченным углом поворота.
Источники питания гидроприводов.
Источники гидравлической энергии: (ИГЭ)
- гидравлические насосы
- гидравлические аккумуляторы
- преобразователи давления
ИГЭ (гидромашины) – обязательный элемент в структуре ГП.
Могут быть обратимыми – работают в режиме насоса и гидродвигателя.
Насосы (гидравлические).
Функция – создание давления рабочей жидкости на выходе из насоса при определенной ее подаче в ед. времени.
Принцип действия – объемное вытеснение РЖ из рабочих камер насоса с помощью вытеснителей. Энергия движения ведущего вала преобразуется в энергию потока рабочей жидкости путем периодического изменения объема их рабочих камер, герметически отделенных друг от друга и попеременно сообщающихся с входом и выходом насосов (с помощью всасывания и нагнетания).
Вытеснители насосов – поршни, пластины, зубья шестерен, кулачки.
Наиболее распространены – вращательные насосы.
Выбор гидропривода при проектировании МТС проводится из анализа основных характеристик (техн.) насосов, т.е. насосы изготавливаются с определенными характеристиками и по этим характеристикам делается выбор для конкретного механизма.
V₀ - рабочий объем насоса – объем жидкости, втесняемый в гидросистему за один оборот вала (или разность между наибольшим и наименьшим значениями замкнутого объема за один оборот вала или один двойной ход рабочего органа насоса). Ряд рабочих объемов (номинальных) регламентируется ГОСТом.
Q[м³/c] – объемная подача насоса. Q= V₀*n, где n частота вращения вала насоса. Действительная подача Qд несколько ниже из-за утечки. Утечки происходят через зазоры конструкций, из рабочих камер обратно во всасывающую полость, в дренажную гидролинию.
n [об/мин] – наибольшая частота вращения вала в течение установленного ресурса с сохранением параметров в пределах норм, зависит от приводного давления.
Pном=F/S – наибольшее давление, при котором насос должен работать в течение установленного срока службы с сохранением параметров в пределах установленных норм (номинальное давление регламентируется ГОСТом).
N [Вт] – мощность потребляемая насосом от приводного двигателя.
Nпол=Q*P – полезная мощность – мощность, сообщаемая насосом РЖ.
ζ= Nпол/N – гидравлический коэффициент полезного действия.
Объемный КПД насоса ζоб= Nпол/(Nпол+Nутечки) или ζоб= Qд/(Qд+Qутечки)
ζмех=(N-Nмех)/N – механический КПД с учетом потерь на трения (Nмех)
ζs= ζ* ζоб* ζмех – общий КПД насоса.
Nэл=P*Q/(60* ζ) – мощность электродвигателя.
Характеристика насоса(графики): зависимость давления при постоянных значениях частоты и вращения, вязкости и плотности РЖ на входе насоса (V₀, Q, N, ζ = f(p))