5. Механические свойства электродвигателей и способы регулирования частоты их вращения
Механические свойства электродвигателей определяются, главным образом, их механическими характеристиками.
Механической характеристикой называют зависимость частоты вращения двигателя от развиваемого им на валу момента
![]()
Механическими характеристиками обладают также рабочие механизмы
![]()
Согласование механических характеристик рабочего механизма и двигателя - одна из важных задач выбора двигателя.
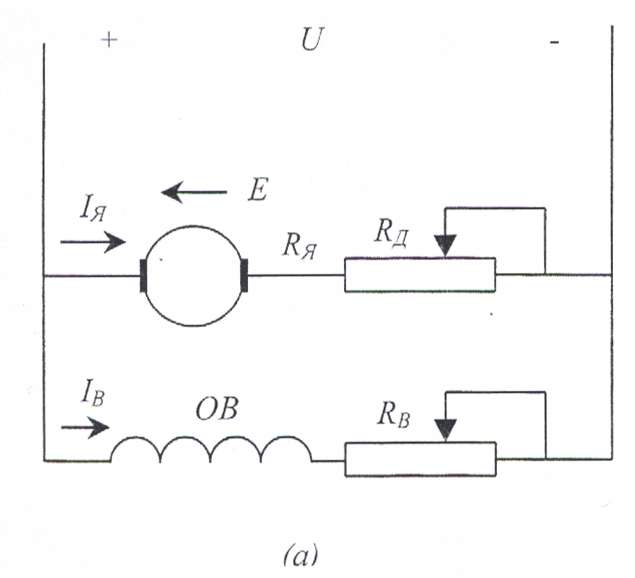
Двигатель постоянного тока независимого возбуждения (рис. 5)
Уравнение механической характеристики имеет вид
![]()
где
U
напряжение,
приложенное к цепи якоря, В;
Ф
магнитный поток, Вб;7?я> Яд
- сопротивление якоря и добавочное в
его цепи, Ом;
к
- конструктивные постоянные двигателя,
![]()
где р - число пар полюсов двигателя; N— число активных проводников якоря двигателя; а - число параллельных ветвей обмотки якоря.
Вращающий
момент двигателя
![]()
ЭДС
двигателя постоянного тока
![]()
![]() пологая
пологая![]()
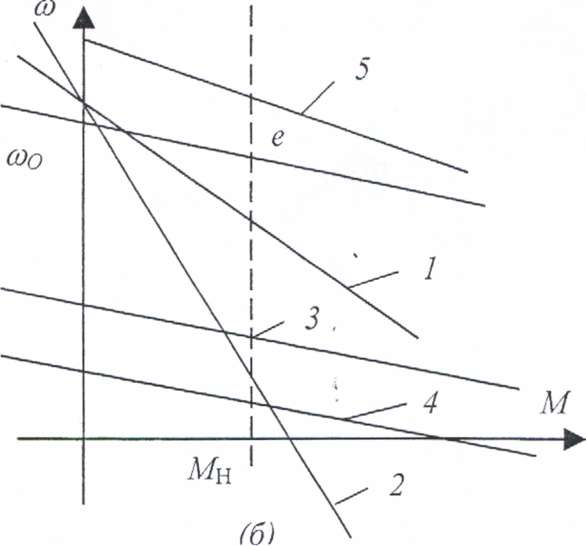
Рис. 5. Схема включения {а) и механические характеристики (б) двигателя постоянного тока параллельного (независимого) возбуждения
Тогда выражение для вращающего момента
![]()
Механическая характеристика е, полученная для условий Rд=0, Rв=0, т. е. напряжение на якоре и магнитный поток двигателя равны номинальным значениям, называется естественной.
Если»Rд>0 (Rв=O), то получаются, искусственные - реостатные характеристики 1 и 2, проходящие через точку щ - скорость идеального холостого хода машины. Чем больше Rд, тем характеристики круче.
Если изменять напряжение на зажимах якоря посредством преобразователя при условии, что Rд=0 и Rв=0, то искусственные механические характеристики имеют вид 3 н 4 и проходят параллельно естественной и тем ниже, чем меньше величина напряжении.
При номинальном напряжении на якоре (Rд=0) и уменьшении магнитного потока (Rb>0) характеристики имеют вид 5 и проходит тем выше естественной и круче ее, чем меньше магнитный лоток.
Двигатель постоянного тока последовательного возбуждения (рис. 6)
Уравнение
механической характеристики имеет вид
![]() или
или![]()
где Rов - сопротивление обмотки последовательного возбуждения, Ом, а коэффициент линейной зависимости (в первом приближении) магнитного потока от тока якоря.
б)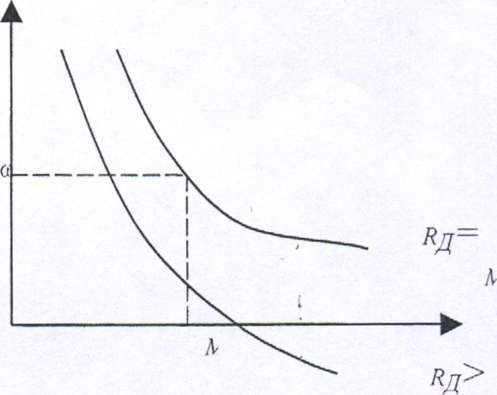
а)
Асинхронный двигатель
Упрощенное
уравнение механической характеристики
имеет вид![]()
где Мм максимальный или критический момент двигателя, Нм, s скольжение;
sM критическое скольжение, соответствующее Нм
Скольжение определяет меру отставания скорости вращения ротора от синхронной скорости ω1 магнитного поля статора
![]()
![]()
![]()
К![]() ритическое
скольжение
ритическое
скольжение
Максимальный момент определяется выражением
Где R1,R’2 активные сопротивления статора и приведенное роторной цепи,
Ом; Х1, X2’ индуктивные сопротивления статора и приведенное роторной цепи, Ом; Uф- фазное напряжение, В.
Для практических расчетов, если неизвестны параметры двигателя,
величину sM можно определить из уравнения механической характеристики,
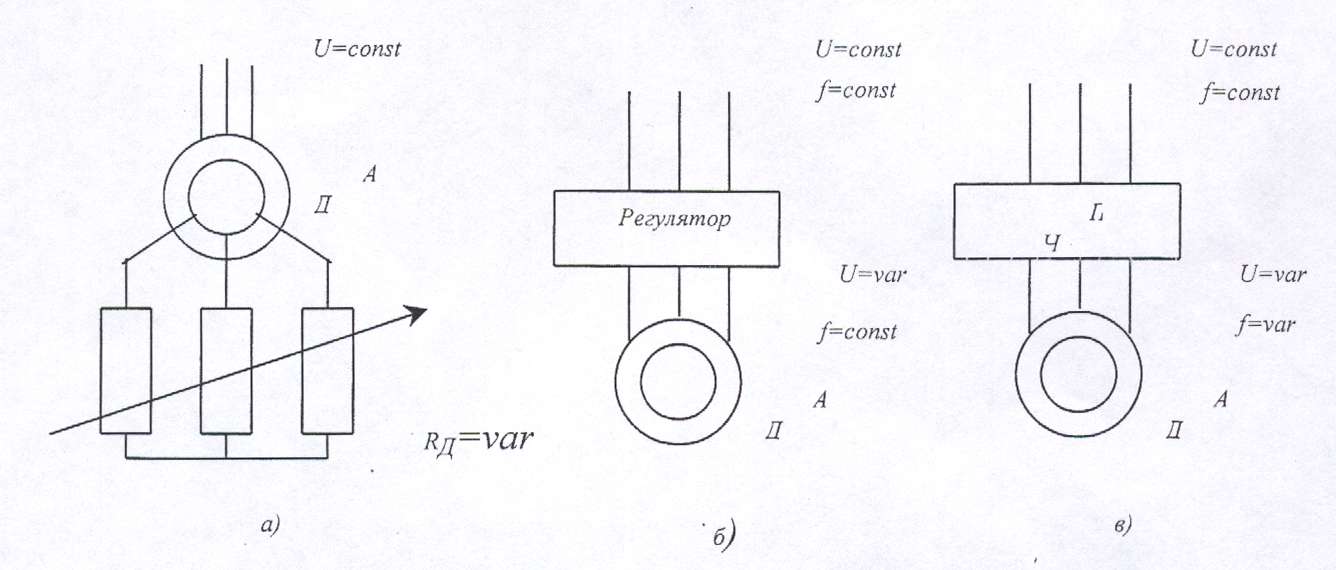
положив s=sH, аМ=М Способы регулирования асинхронного двигателя
представлены на рис. 7
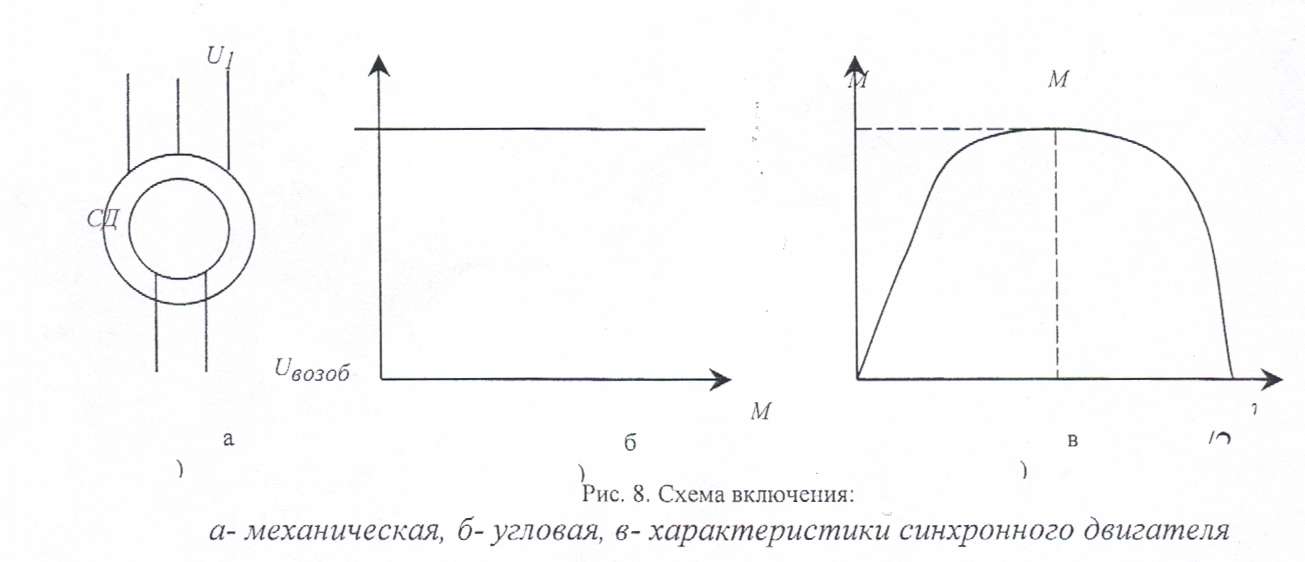
Синхронный
двигатель
(рис. 8)
Механическая
характеристика: М — const. Угловая
характеристика: М
= Mmax
sin0;
Мтах =3U1E0
/ωХ1,
где Е0 - ЭДС , наводимая
в статоре, В; Х1 -индуктивное сопротивление
статора, Ом; 0 - угол нагрузки машины.