

1.2.5. Общий случай движения тела
Под общим случаем понимается движение свободного твердого тела, перемещающегося в пространстве произвольным образом. То есть тело может перемещаться вдоль любой из координатных осей и поворачиваться относительно каждой из них. Тело имеет шесть степеней свободы.
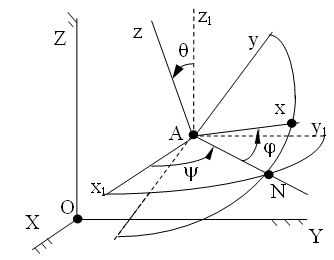
Для описания общего случая движения тела принято использовать две подвижные системы координат. Одна из систем движется поступательно. Положение начала движущейся системы осей (назовем ее, как и при рассмотрении плоского движения тела, точкой А) относительно основной системы отсчета описывается тремя уравнениями. Как и в предыдущем случае, эту точку, называют полюсом.
 Вторая
подвижная система координат с началом
в точке А связывается с телом. Ее
движение относительно точки А описывается
уравнениями сферического движения.
Таким образом,
Вторая
подвижная система координат с началом
в точке А связывается с телом. Ее
движение относительно точки А описывается
уравнениями сферического движения.
Таким образом,
Шесть уравнений вида:
XA = XA (t); YA = YA (t); ZA = ZA (t) ;
![]() =
(t)
;
=
(t)
;
![]() =
(t)
;
=
(t)
;
![]() =
(t)
=
(t)
Называют уравнениями движения тела в общем случае.
Основными кинематическими характеристиками движения тела в общем случае его движения являются скорость и ускорение поступательно движущейся системы координат ( и ), а также угловая скорость и угловое ускорение системы координат, связанной с телом, при ее сферическом движении относительно полюса.
Как и при плоском движении, характеристики поступательного движения тела зависят от выбора полюса, а вращательного - не зависят. Это можно доказать.
Теоремы об определении скоростей и ускорений тела в общем случае его движения формулируются и доказываются практически так же, как и при плоском движении. Скорости и ускорения точек тела определяются с помощью тех же векторных равенств.
= + = + ;
= + = + .
Отличия
в этих векторных равенствах
лишь в том, что при плоском движении
вектора
![]() и
и
![]() перпендикулярны
АВ, а в общем случае, как правило,
нет.
перпендикулярны
АВ, а в общем случае, как правило,
нет.
Задачи на определение характеристик движения тел и их точек в общем случае движения тел на практических занятиях не рассматриваются. Поэтому все, что написано об этом виде движения тела, можно считать информацией к сведению.
1.3. Сложное движение точек и тел
Сложным называют движение точки или тела, рассматриваемое сразу относительно двух или нескольких систем отсчета.
Введение двух, а иногда и нескольких, систем отсчета, при решении задач кинематики является довольно распространенным приемом. Этот прием позволяет рассматривать сложное движение точек и тел как совокупность более простых и легче описываемых движений.
Одной из вводимых систем отсчета всегда является неподвижная система координат. Ее называют также и основной. Эта система отсчета при решении большинства задач механики связывается с неподвижным относительно Земли телом. Остальные системы отсчета - подвижные. Эти системы отсчета всегда связываются с тем или иным перемещающимся относительно основной системы отсчета телом. Связанные с телом системы координатных осей при изучении сложного движения тел (сферического, плоского или в общем случае) позволяют определить положение этих тел относительно неподвижной системы отсчета с помощью минимального числа уравнений, а при изучении сложного движения отдельных точек определить характеристики этого движения либо относительно неподвижной, либо относительно подвижной системы отсчета. Задачи здесь могут быть разными.
Рассмотрим, как более простые, случаи сложного движения отдельных точек.
Для дальнейших рассуждений введем предварительно несколько понятий-определений.