1.1.3. Естественный способ задания движения точки
Используется тогда, когда заранее известна траектория точки. Траекторию в этом случае считают криволинейной осью. На этой оси ( как и на любой координатной ) выделяют начало отсчета и положительное направление отсчета.
Положение точки на траектории определяется ее дуговой координатой s.
З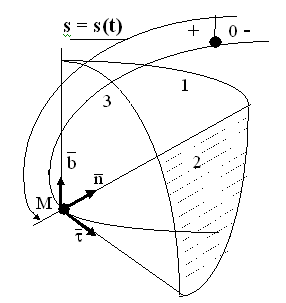 ависимость
дуговой координаты от времени,
ависимость
дуговой координаты от времени,
которая в общем виде записывается в виде
s = s(t),
Называют уравнением или законом движения точки.
Дуговую координату в задачах кинематики желательно не путать с пройденным точкой путем, который во всех школьных задачах, как правило, обозначался таким же символом s .
Дуговая координата может быть положительной и отрицательной, может увеличиваться и уменьшаться. Пройденный путь может только увеличиваться и не может быть отрицательной величиной.
При этом способе задания движения для определения характеристик движения точки вводится особая система взаимно перпендикулярных осей, движущихся вместе с точкой и меняющих свое положение в пространстве. Оси принято называть естественными осями координат. Совокупность взаимно-перпендикулярных плоскостей, определяемых этими осями, называют подвижным трехгранником.
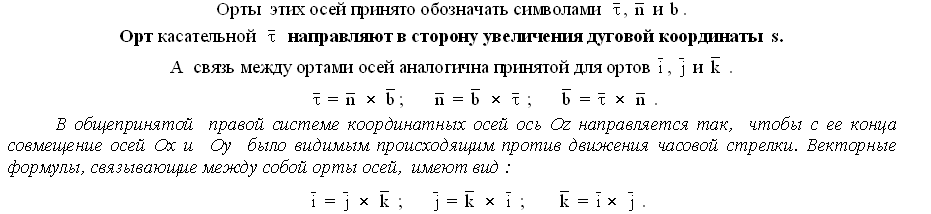
Одна из осей всегда направляется по касательной к траектории движущейся точки; другая ось - к центру кривизны траектории точки ( эту ось называют нормалью) ; третью ось - бинормаль направляют так же, как ось z направлена по отношению к осям x и y.
Касательная, нормаль и бинормаль определяют положение плоскостей подвижного трехгранника. Нормальная плоскость перпендикулярна касательной к траектории точки и проходит через центр кривизны траектории; соприкасающаяся плоскость проходит через касательную к траектории точки и центр кривизны траектории. Третья плоскость называется спрямляющей.
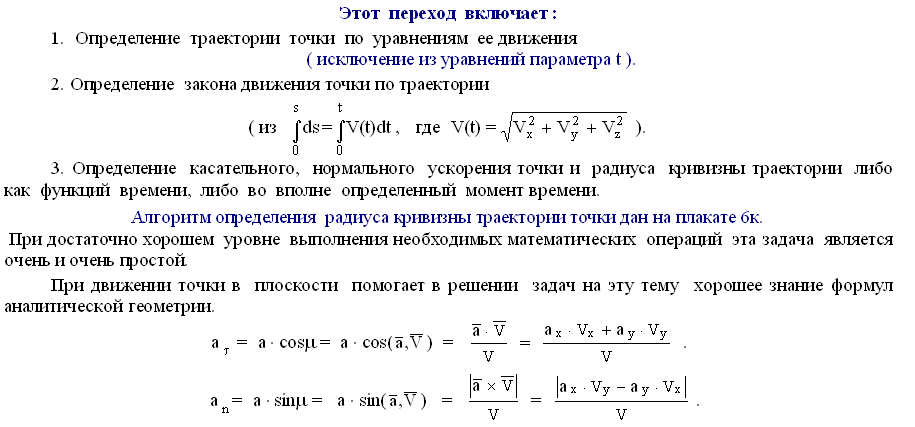
Выведем теперь формулы для определения векторов скорости и ускорения точки при рассматриваемом способе задания ее движения.
Для этого соединим на рисунке начало отсчета (т.е. неподвижную точку) с движущейся точкой радиус-вектором , который будем считать некоторой функцией ее дуговой координаты = (s) и, следовательно, при s = s(t) сложной функцией времени.


Величина ρ здесь – радиус кривизны траектории точки.
Для себя отметим далее:
1. Вектор полного ускорения характеризует изменение вектора скорости точки и по величине, и по направлению.
2. Касательное ускорение характеризует изменение величины скорости и направлено по касательной к траектории точки.
При равномерном движении касательное ускорение точки равно нулю.
3. Нормальное ускорение характеризует изменение направления вектора скорости точки и направлено к центру кривизны траектории точки.
Нормальное ускорение возникает только при криволинейном движении.
При движении точки по прямой её нормальное ускорение равно нулю.
4. Ускорение точки при ее движении по кривой равно геометрической сумме касательного и нормального ускорений.
5. Направление вектора ускорения определяется его углом с вектором скорости точки.
В общем случае движение точки может быть либо просто ускоренным, либо просто замедленным. Последнее определяется при сопоставлении знаков производных ds/dt и dV/dt. Если знаки производных одинаковы, то движение ускоренное; при разных знаках - замедленное.
В заключение темы “Способы задания движения точки” рассмотрим переход от координатного способа задания движения к естественному.