

1.3.1. Сложное движение тел
Знание характеристик относительного и переносного движения при сложном движении точек позволило нам получить удобные методы определения характеристик их движения в неподвижной системе отсчета.
Попробуем с тех же позиций рассмотреть сложное движение тел - т.е. сферическое, плоское и общий случай движения. Формулы, которые были получены для определения скоростей и ускорений точек тел, оказались в некоторых случаях очень похожими на формулы для определения скоростей и ускорений точек при их сложном движении. Только в других обозначениях. Результат закономерный. Во всех случаях сложного движения тел рассматривалось движение точек тел относительно системы координат, связанной с телом (относительное движение ), и движение этой системы координат относительно неподвижной системы отсчета - переносное движение. Во всех случаях нас интересовали скорости и ускорения точек в их движении относительно неподвижной системы отсчета - то есть абсолютное движение.
Разные варианты движения тел, с которыми были связаны подвижные системы отсчета, и разные варианты относительного движения тел в результате сложения простых движений ( поступательного и вращательного) позволяют получить тот или иной вид абсолютного движения тела.
Сочетаний вариантов сложения поступательного и вращательного движений совсем немного. И просто целесообразно рассмотреть все варианты сложения движений с позиций сложного движения – то есть, выделяя относительное, переносное и абсолютное движение в каждом из случаев. А затем результаты такого анализа сопоставлять с рассмотренным ранее.
Вариант 1. Сложение поступательных движений
Определим
абсолютное движение тела, которое
движется поступательно со скоростью
![]() в
подвижной системе отсчета при
поступательном движении последней с
со скоростью
в
подвижной системе отсчета при
поступательном движении последней с
со скоростью
![]() .
.
Ясно,
что в обозначениях, принятых в сложном
движении,
=
![]() ,
а
=
,
а
=
![]() .
Абсолютные скорости всех точек тела
при
.
Абсолютные скорости всех точек тела
при
![]() =
+
будут равными. Следовательно,
результатом сложения двух или нескольких
поступательных движений будет
поступательное движение со скоростью,
равной геометрической сумме
скоростей в каждом из
движений.
=
+
будут равными. Следовательно,
результатом сложения двух или нескольких
поступательных движений будет
поступательное движение со скоростью,
равной геометрической сумме
скоростей в каждом из
движений.
Вариант 2. Сложение вращений относительно пересекающихся осей
Пусть тело А на рисунке вращается относительно оси ОК, которая в свою очередь вращается относительно неподвижной оси ОО1 и направления вращений одинаковы.
Свяжем
с неподвижной осью ОО1
неподвижную систему отсчета, а с
осью ОК - подвижную. В соответствии
с ранее введенными определениями назовем
угловую скорость вращения тела
относительно оси ОК относительной
угловой скоростью ( обозначив ее
![]() ),
а угловую скорость вращения оси
ОК относительно оси ОО1
переносной угловой скоростью.
Последнюю обозначим символом
),
а угловую скорость вращения оси
ОК относительно оси ОО1
переносной угловой скоростью.
Последнюю обозначим символом
![]() .
.
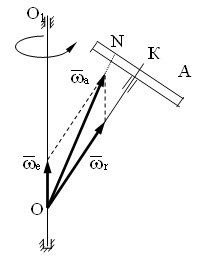 Покажем
на рисунке в точке пересечения
осей векторы угловых скоростей в каждом
из вращений и разберемся со скоростями
точек тела, расположенными в плоскости,
проходящей через рассматриваемые оси
и в области между осями. Относительные
скорости точек направлены перпендикулярно
плоскости рисунка и направлены к
нам; переносные скорости также
перпендикулярны плоскости рисунка
и направлены от нас.
Покажем
на рисунке в точке пересечения
осей векторы угловых скоростей в каждом
из вращений и разберемся со скоростями
точек тела, расположенными в плоскости,
проходящей через рассматриваемые оси
и в области между осями. Относительные
скорости точек направлены перпендикулярно
плоскости рисунка и направлены к
нам; переносные скорости также
перпендикулярны плоскости рисунка
и направлены от нас.
При таком направлении скоростей ясно, что в пространстве между осями должны быть точки, у которых геометрическая сумма относительной и переносной скоростей равна нулю.
Одной из таких точек является точка пересечения осей - точка О. Докажем, что геометрическим местом точек, абсолютная скорость которых равна нулю, является линия, направленная вдоль вектора, являющегося геометрической суммой векторов угловых скоростей в относительном и переносном вращении, сложенных в точке пересечения осей.
Построим на рисунке векторный параллелограмм и определим абсолютную скорость точки N, находящейся на продолжении диагонали этого параллелограмма.

Линию, проходящую через две неподвижные точки тела, ранее мы назвали осью вращения. В этом случае мы имеем дело с мгновенной осью вращения и мгновенно вращательным движением. Угловую скорость в мгновенно вращательном движении принято называть мгновенной угловой скоростью.
Она же будет и абсолютной.
Вектор мгновенной угловой скорости на основании рассмотренного выше определяется по угловым скоростям вращений в относительном и переносном движении тела.
![]() =
=
![]() +
+
![]() .
.
Несложно определить, что при разном направлении вращений положение мгновенной оси вращения определяется этим же векторным равенством.
Можно рассмотреть далее и случай, когда тело участвует в трех вращениях относительно пересекающихся осей.
В результате получим следующие выводы.
Если тело участвует в двух или нескольких вращениях относительно пересекающихся осей, то :
1. В каждый момент движение тела является мгновенно вращательным. Мгновенная ось вращения проходит через точку пересечения осей. Вектор мгновенной угловой скорости тела равен геометрической сумме векторов угловых скоростей в каждом из вращений.
2. Движение тела является сферическим - то есть движением относительно неподвижной точки пересечения осей.
3. Скорости точек тела при его сферическом движении можно определять как в мгновенно вращательном движении, так и по формулам сложного движения.