1.1. Способы задания движения точки
В кинематике в качестве основных рассматриваются три способа задания движения точки: векторный, координатный и естественный. Рассмотрим по порядку общий вид уравнений движения при применении каждого способа, а также определение характеристик движения - скорости и ускорения точки.
1.1.1. Векторный способ
Используется как самый краткий и наглядный в общих теоретических рассуждениях, при выводе основных формул и при доказательствах теорем кинематики.
При этом способе задаются: начало отсчета (неподвижная, а при сложном движении движущаяся точка) и радиус-вектор, соединяющий начало отсчета с точкой, движение которой исследуется.
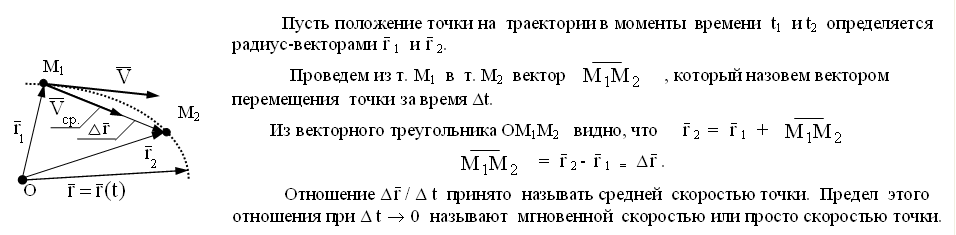
Под скоростью точки понимается ее кинематическая характеристика, определяемая как производная по времени от радиус-вектора движущейся точки.
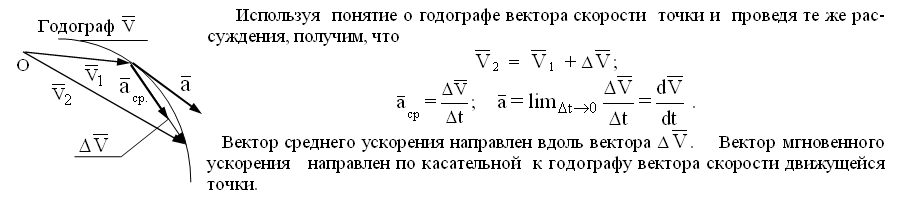
Под ускорением точки понимается ее кинематическая характеристика, определяемая как вторая производная по времени от радиус-вектора движущейся точки.
Вспомним, как выводились формулы для определения скорости и ускорения точки в школьном курсе физики.

Заканчивая разговор о векторном способе задания движения точки, подведем итоги.
1.
Уравнение движения точки в общем виде
имеет вид
![]() =
(t).
=
(t).
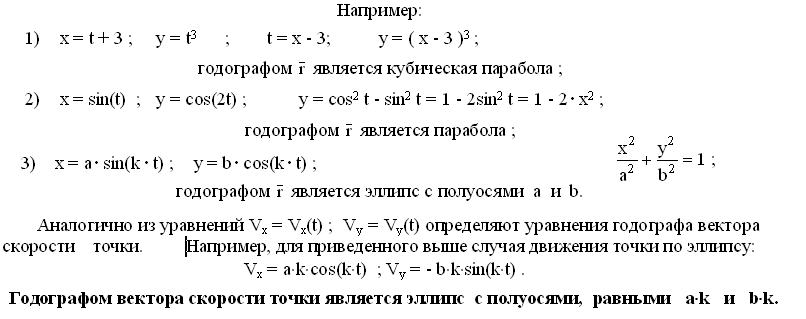
2. Годограф радиус-вектора является траекторией движущейся точки .

Стандартные обозначения производных по времени от тех или иных величин нужно узнавать. В механике они используются довольно часто. В этом учебнике записи уравнений или формул приведены в виде, в котором эти записи желательно запомнить.
4. Векторный способ задания движения используется только в теоретических рассуждениях. Для решения задач используются координатный или естественный способы задания движения.
1.1.2. Координатный способ задания движения
Этот способ является основным для решения задач и кинематики, и динамики. Используется, как правило, декартова система координатных осей, направления которых принято задавать векторами-ортами , и .
В этой системе координат радиус-вектор
движущейся точки
=
(t)
через его компоненты записывается в
виде
=
x
+
y
+
z
,
где x, y, и z - координаты
точки, являющиеся некоторыми функциями
времени.
этой системе координат радиус-вектор
движущейся точки
=
(t)
через его компоненты записывается в
виде
=
x
+
y
+
z
,
где x, y, и z - координаты
точки, являющиеся некоторыми функциями
времени.
Зависимости вида : x = x(t); y = y(t) ; z = z(t) и принято называть уравнениями движения точки в декартовой системе координат.
При координатном способе задания движения:

То есть и вектор скорости точки, и вектор ее ускорения при координатном способе задания движения определяются через их проекции на координатные оси. А как найти модуль каждого вектора и его направляющие косинусы, повторять, наверное, не стоит.
Отметим, что: уравнения движения точки называют также параметрическими уравнениями траектории точки или годографа ее радиуса-вектора.
Для определения уравнения траектории из уравнений движения необходимо исключить параметр времени t в явном виде, или содержащие этот параметр функции.