Вариант 5. Сложение поступательного и вращательного движений
ступательное движение при этом будем рассматривать как переносное со скоростью Ve , а вращение с угловой скоростью - как относительное.
Здесь возможны 3 различных случая.
1. , то есть ось вращения тела перпендикулярна плоскостям, в которых движутся все точки тела.
С
этим случаем мы встречались,
рассматривая плоское движение тела как
результат сложения поступательного
движения тела вместе с полюсом и
вращения тела относительно оси,
проходящей через полюс. 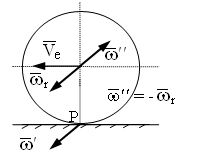
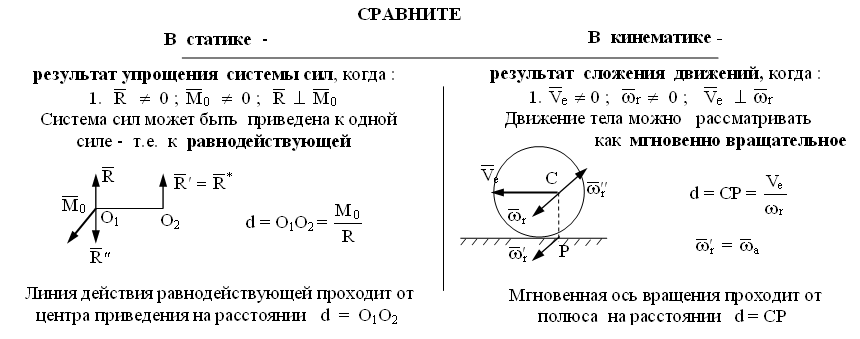
Тогда было доказано, что в любой момент движение тела является мгновенно вращательным, и что мгновенная ось вращения проходит через точку, называемую мгновенным центром скоростей.
Представив
вектор скорости поступательного
движения тела ![]() как
вектор-момент пары вращений
с плечом, равным расстоянию
от полюса до мгновенного центра
скоростей, можно сделать точно такой
же вывод.
как
вектор-момент пары вращений
с плечом, равным расстоянию
от полюса до мгновенного центра
скоростей, можно сделать точно такой
же вывод.
эквивалентен
паре вращений
![]() и
и
![]() .
.
![]()
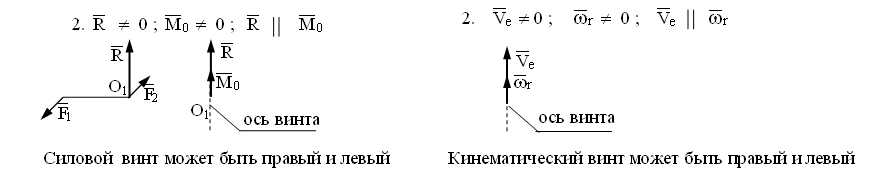
2.
![]() ║
║ ![]() ,
- случай,
когда ось вращения тела параллельна
направлению вектора скорости
поступательного перемещения тела в
пространстве. Тело в этом случае
совершает винтовое движение.
,
- случай,
когда ось вращения тела параллельна
направлению вектора скорости
поступательного перемещения тела в
пространстве. Тело в этом случае
совершает винтовое движение.
Все точки тела движутся по спиралям, радиусы которых определяются расстояниями точек до оси вращения.
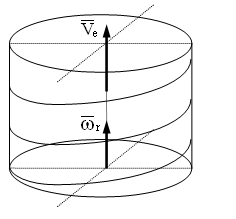 Одним
из наиболее распространенных случаев
при винтовом движении тел является
случай , когда и угловая
скорость вращения тела, и скорость
его поступательного движения вдоль оси
вращения являются постоянными.
Одним
из наиболее распространенных случаев
при винтовом движении тел является
случай , когда и угловая
скорость вращения тела, и скорость
его поступательного движения вдоль оси
вращения являются постоянными.
Тогда за каждый оборот тела его точки перемещаются вдоль оси на одинаковое расстояние, называемое шагом винта.
Зная время одного оборота тела при его равномерном вращении - Тh (Тh = 2π / ω), можно определить, что шаг винта должен находиться из выражения
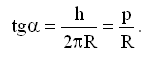
Отношение p = Ve / r в этом выражении называют параметром винта.
Развертка
любой винтовой линии для
точки, находящейся на расстоянии
R от оси вращения, за один оборот тела
представляет собой прямоугольный
треугольник с катетами, равными
h и 2![]() R.
Тангенс угла наклона любой винтовой
линии к плоскости, перпендикулярной
оси вращения тела, выражается
через параметр винта
R.
Тангенс угла наклона любой винтовой
линии к плоскости, перпендикулярной
оси вращения тела, выражается
через параметр винта
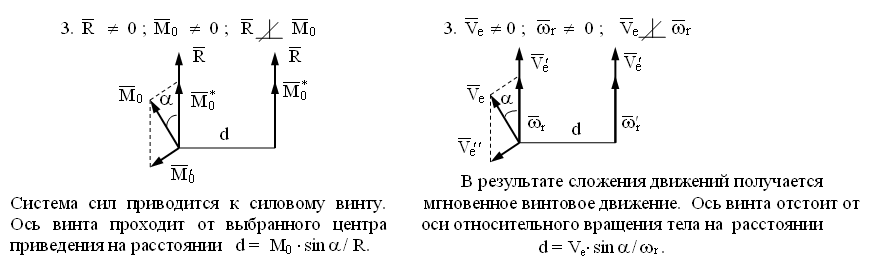
3. Не перпендикулярен - самый общий случай движения тела.
Докажем, что в каждый момент времени движение тела в данном случае можно считать мгновенно винтовым.
Для этого разложим ( см. рисунок ) вектор скорости поступательного движения тела на два вектора - на скорость поступательного движения тела вдоль оси вращения тела - и на скорость поступательного перемещения тела в направлении, перпендикулярном оси - .
Вектор рассмотрим как вектор-момент пары вращений с угловой скоростью относительно двух параллельных осей , находящихся друг от друга на расстоянии
d
= Ve
![]() sin/
sin/![]() .
.
Отбросив
векторы
![]() и
,
как равные и противоположно направленные,
получим, что система векторов
и
эквивалентна
системе векторов
и
,
как равные и противоположно направленные,
получим, что система векторов
и
эквивалентна
системе векторов
![]() и
,
где
.
А это винтовое движение.
и
,
где
.
А это винтовое движение.
При сложении поступательного и вращательного движений также целесообразно провести аналогию с тем, что рассматривалось в “Статике”.