

Зависимости рассматриваемых углов от времени называются уравнениями сферического движения. Эти уравнения имеют вид :
ψ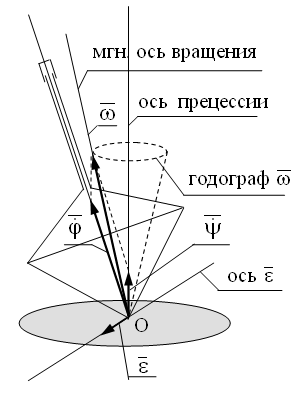 =
ψ(t) ; = (t) ; θ = θ(t).
=
ψ(t) ; = (t) ; θ = θ(t).
Изменение каждого из углов с течением времени можно представить, вспомнив движение детского волчка
Вращение волчка относительно его оси симметрии - есть его собственное вращение.
Вращение оси волчка вокруг вертикали является прецессией.
Медленное изменение угла между осью прецессии и осью собственного вращения во вращающейся плоскости Zoz - нутация.
Изменение каждого из углов происходит с той или иной угловой скоростью.
Эти угловые скорости называются соответственно: угловой скоростью собственного вращения; угловой скоростью прецессии и угловой скоростью нутации. Определяются каждая из угловых скоростей с помощью производных по времени от соответствующих углов. Векторы угловых скоростей направлены вдоль оси собственного вращения, вертикальной неподвижной оси (оси прецессии) и вдоль линии узлов.
При описании движения твердого тела относительно неподвижной точки Л. Эйлером была доказана следующая теорема:
“Тело, имеющее неподвижную точку, можно перевести из одного положения в любое другое с помощью всего одного поворота относительно оси, проходящей через неподвижную точку”.
Чтобы в дальнейшем обойтись без геометрически сложного доказательства этой теоремы, используем, как в учебнике С.М. Тарга [2], выводы из теории сложного движения точек и тел. Там доказывается (этот случай будет рассмотрен далее), что для тела, участвующего в двух вращениях относительно пересекающихся осей, справедливо следующее:
1. В каждый момент движения тела, участвующего в двух или нескольких вращениях относительно пересекающихся осей, существует мгновенная ось, относительно которой поворачивается тело.
2. Мгновенная ось вращения проходит через неподвижную точку - точку пересечения осей.
3. Вектор мгновенной угловой скорости, характеризующий положение мгновенной оси вращения тела, определяется геометрической суммой векторов угловых скоростей в каждом из вращений, сложенных в точке пересечения осей.
Для случая сферического движения вектор мгновенной угловой скорости вращения тела определяется нижеприведенным векторным равенством
![]() .
.
Изменяющиеся с течением времени проекции этого вектора на оси неподвижной (или подвижной) системы координат можно определить, зная положение в пространстве каждого из слагаемых векторов, модули векторов и углы Эйлера, как функции времени.
Еще
одной кинематической характеристикой
тела при его сферическом движении
является вектор углового ускорения
-
![]() .
.
 Этот
вектор изображают приложенным в
неподвижной точке.
Этот
вектор изображают приложенным в
неподвижной точке.
Линию, вдоль которой направлен этот вектор, называют осью углового ускорения.
Геометрически вектор углового ускорения равен скорости движения конца вектора мгновенной угловой скорости по его годографу.
При
равномерной прецессии и постоянстве
угловой скорости собственного вращения
тела годографом вектора мгновенной
угловой скорости
![]() является
(см. рисунок выше) окружность. Скорость
движения конца вектора по этой окружности
равна векторному произведению
вектора угловой скорости прецессии
на вектор мгновенной угловой скорости.
является
(см. рисунок выше) окружность. Скорость
движения конца вектора по этой окружности
равна векторному произведению
вектора угловой скорости прецессии
на вектор мгновенной угловой скорости.
Это
записывается в виде
![]() .
.
Для определения скоростей и ускорений точек тела при его сферическом движении используются векторные формулы, которые были получены для вращающихся тел при введении вектора угловой скорости и вращающейся системы координатных осей.

Радиус-вектором здесь является вектор, проведенный из т. О в точку, характеристики движения которой определяются.
Скорости точек тела при сферическом движении расположены в плоскостях, перпендикулярных мгновенной оси вращения, и пропорциональны расстояниям до этой оси.

*** Из векторной формулы для определения скорости точки можно получить формулы, по которым определяются проекции вектора скорости точки на оси неподвижной системы координат.
Эти формулы называют формулами Л. Эйлера.
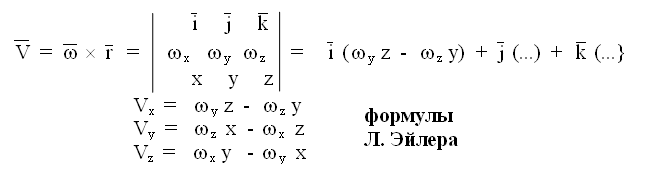

Используются эти формулы редко и для решения специальных задач, которые в кратком курсе теоретической механики не рассматриваются.
В отличие от вращательного при сферическом движении тел осестремительные и вращательные
ускорения
точек
перпендикулярны между собой
только в плоскости, проходящей через
векторы
![]() и
и
![]() .
.

![]() и
и
![]() в
этих формулах - расстояния от
точки до оси углового ускорения
и до мгновенной оси вращения
тела.
в
этих формулах - расстояния от
точки до оси углового ускорения
и до мгновенной оси вращения
тела.
Модуль вектора ускорения любой точки определяется как модуль суммы любых двух векторов - т.е. по теореме косинусов.
![]()
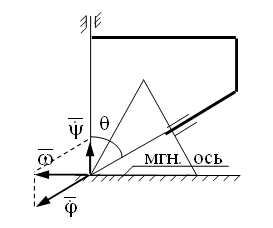
В технических устройствах угол θ между осью собственного вращения тела и осью прецессии задается конструктивно неизменным. При заданной угловой скорости прецессии и известной конструкции устройства определение положения мгновенной оси вращения тела и его мгновенной угловой скорости является совсем несложной задачей. То же касается определения скоростей и ускорений точек тела.