

Беспоисковые сау эп
А даптивные
системы с наблюдающим устройством
идентификации. В
датчиковых системах может оцениваться
только поток, в бездатчиковых
потокосцепление ротора и скорость.
даптивные
системы с наблюдающим устройством
идентификации. В
датчиковых системах может оцениваться
только поток, в бездатчиковых
потокосцепление ротора и скорость.
Типовые структуры систем с эталонными моделями. Адаптивная система с параметрической самонастройкой.

Сигнал с выхода эталонной модели Yм сравнивается с фактическим сигналом Y.Разница подаётся на вход корректирующего устройства Wk изменяющего параметры регулятора Wp.
Адаптивная система с сигнальной самонастройкой
Е сли
фактический сигнал Y
и эталон Yм
совпадают,
то сигнал на выходе корректирующего
устройства Wk=0.
сли
фактический сигнал Y
и эталон Yм
совпадают,
то сигнал на выходе корректирующего
устройства Wk=0.
При изменении параметров объекта фактическиий сигнал отличается от желаемого, что приводит к появлению сигнала на выходе корректирующего звенаWk,который алгебраически суммируясь с сигналом регулятора формирует такое воздействие на объект, при котором фактический сигнал будет равен желаемому.
Адаптивные системы с внутренними обратными связями.(примеры)
Р – регулятор; ГОС – главная обратная связь; ВОС – внутренняя обратная связь
Примером применения внутренних обратных связей в тиристорном приводе постоянного тока является адаптация в режиме прерывистого тока.
Поисковые сау эп
Поисковые АС выполняют автомат. Опт. СУЭП в соответствии с принятыми критериями качества. Это делается путём специально организованного режима поисковых изменений параметров регуляторов системы. Основным отличием от поисковых является наличие пробных движений и оценка на каждом шаге нужных направлений. Таким образом САУ стремиться обеспечить постоянство показателей качества системы в не зависимости от из-ий самой системы или внешних воздействий. Блоки оценки показателей качества включают в себя контрольно измерительную аппаратуру и функциональные блоки, состав которых зависит от принятого показателя качества. Блок организации движений к экстремуму показателей качества включает в себя устройство, выполняющее пробные изменения параметров системы и устройство оценки изменений показателей качества и устройство выработки управляющего сигнала.
31.Адаптивные системы управления с внутренними обратными связями. Структура, примеры практической реализации.

Р – регулятор; ГОС – главная обратная связь; ВОС – внутренняя обратная связь
Примером применения внутренних обратных связей в тиристорном приводе постоянного тока является адаптация в режиме прерывистого тока.
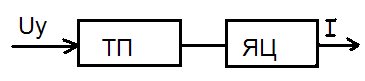
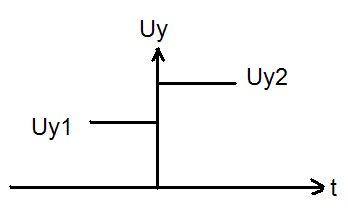
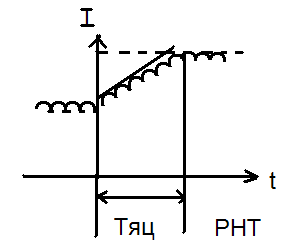

В режиме непрерывного тока при изменении Uу скачком ток выходит на новое значение с постоянной времени Тяц.
В режиме прерывистого тока новое значение Id2 достигается практически за один импульс.

Сопротивление
тиристорного преобразователя в режиме
прерывистых токов

Проанализируем работу контура тока в режиме РПТ.
Таким образом в режиме прерывистых токов нужен И-регулятор.

Если регулятор тока выбран ПИ, то в режиме прерывистых токов:


ЛАЧХ разомкнутого контура тока.
Таким образом РПТ быстродействие контура тока определяемое частотой среза
 существенно
падает.
существенно
падает.Ухудшаются характеристики контура скорости.
Рассмотрим работу контура скорости в режиме прерывистых токов.
Для этого упростим передаточную функцию замкнутого контура тока.

Работа контура тока в РПТ

1.Контур скорости настроен на МО

 -
частота среза контура скорости
-
частота среза контура скорости
Ч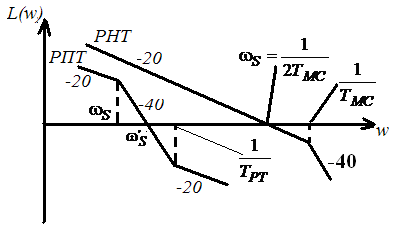 астота
среза контура скорости приходится на
участок с наклоном -40ДБ-повышается
колебательность.
астота
среза контура скорости приходится на
участок с наклоном -40ДБ-повышается
колебательность.