

2. Контур скорости настроен на со

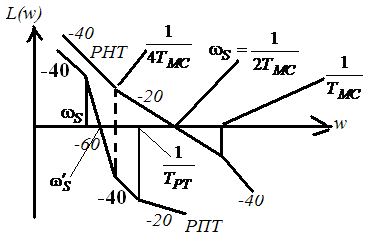 -
частота среза контура скорости
-
частота среза контура скорости
Контур скорости в РПТ не устойчив, поэтому на практике тиристорного привода постоянного тока обязательно применяют адаптацию к режиму прерывистых токов.
32.Адаптивные системы управления с эталонными моделями и наблюдателями состояния. Назначение эталонных моделей, принципы построения систем, примеры практической реализации в электроприводах постоянного и переменного тока.
Важное место среди беспоисковых самонастраивающихся систем занимают системы с эталонной моделью.
Применение моделей решить ряд важных задач: осуществить более простыми средствами желаемую оптимизацию управляемого
процесса, в том числе реализацию нелинейного закона управления; обеспечить быстродействие самонастройки при линейном и нелинейном объектах и нестационарности их параметров; обеспечить более простую реализацию за счет подстройки модели вместо подстройки основной системы при существенно изменяющихся характеристиках входных сигналов.
Разновидности беспоисковых систем, в которых эталонные модели присутствуют в явном виде, получили название систем с эталонными моделями.
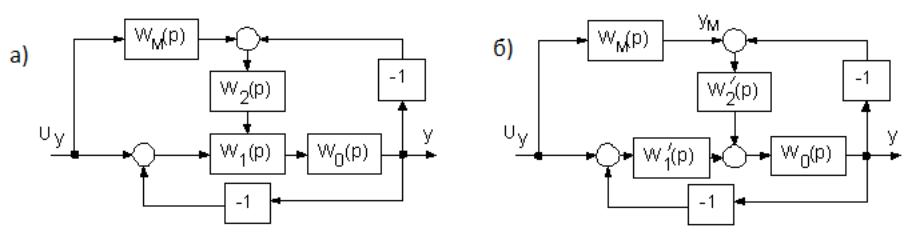
Рисунок 32 – Беспоисковая система с эталонными моделями
Простейшие структурные схемы таких систем показаны на рисунке. Сигнал ум на входе эталонной модели, имеющей передаточную функцию W(p)M , сравнивается с сигналом у на выходе системы. По разности этих сигналов выбирается корректирующее воздействие на систему. В первом случае (рис.а) вслед за измерением параметров объекта W(p)0 изменяются параметры корректирующего звена W1(p). Во втором случае (рис.б) формируется добавочный сигнал, параметры звена W1(p) остаются неизменными. Синтез звеньевW2(p),W12(p) производится в соответствии с требуемым качеством работы самонастраивающейся системы.
В процессе функционирования системы параметры эталонной модели не изменяются и соответствуют значениям, при которых ПП в модели близки к желаемым ПП в системе управления. Возможность использования самонастройки без изменения параметров корректирующего звена (рис.б), получивший название сигнальной самонастройки, следует из анализа ПФ самонастраивающейся системы.

Предположим для простоты, что W21 ( p) = K2и K2 → ∞
Тогда передаточная функция системы W(p) будет приближённо равна ПФ модели Wн(p) независимо от изменений W0(p). Следовательно, при изменении параметров объекта в замкнутой системе динамические процессы по управлению будут стабилизированы.
В техническом выполнении такая система довольно проста, однако основным условием работы системы является условие малых отклонений параметров объекта от начальных значений. Это условие не является определяющим при выполнении системы по схеме рис 32,а.
Системы с эталонами весьма чувствительны к возмущающим воздействиям и помехам. Это объясняется тем, что модель выполняется ориентируемой на определённое воздействие, например на управляющее, и все иные воздействия могут искажать процесс самонастройки. Возникает в таком случае необходимость сигнальной избирательности в работе системы либо необходимость использования весьма сложных эталонных моделей.