

1. Двигатель постоянного тока как объект управления. Типовые управляющие и возмущающие воздействия.
Двигатель как объект управления представляет собой объект второго порядка, характер переходных процессов в котором зависят от соотношения Тяц и Тм.
Передаточные функции по управлению и возмущению:
 ;
;
 ,
,
где
 – коэффициент передачи по управлению;
– коэффициент передачи по управлению; – коэффициент передачи по возмущению.
– коэффициент передачи по возмущению.
1.
При
 :
:
 ,
где
,
где
 ,
,
 ,
,
2.
При
 :
:
 ,
где
,
где
 ,
,
1
– Тм=4Тяц; 2
–
 ;
3 –
;
3 –
 .
.
К типовым управляющим воздействия относятся напряжения и магнитный поток, а к возмущающим – нагрузка, колебания частоты и напряжения питающей сети.
2. Статические характеристики системы тп-дпт. Особенности тиристорного преобразователя как объекта оптимального управления.
Функциональная схема.
LM – обмотка возбуждения;
UZM – тиристорный преобразователь якорной цепи;
UZLM – тиристорный преобразователь обмотки возбуждения;
L – сглаживающий дроссель;
Uзс – задание на скорость;
СУЭП – система управления электропривода.
Согласно функциональной схеме и принципу работы ДПТ НВ регулирование скорости может осуществляться в двух зонах:
1 – путем изменения подводимого к якорю напряжения;
2 – путем изменения потока.

СИФУ является дискретным элементом преобразуя непрерывное напряжение управления Uу в дискретную функцию моментов включения тиристоров. Характеризуется временным запаздыванием.
СИФУ – элемент чистого запаздывания и представляется звеном с передаточной функцией:

При малом значении Тсифу наиболее точной аппроксимацией чистого запаздывания является апериодическое звено.
С учетом сказанного структурная схема ТП представляет собой:

Если считать что временного сдвига между входным сигналом α и первой гармоникой ЭДС нет то управляемый выпрямитель можно считать безинерционным звеном 1-го порядка с коэффициентом передачи Кув. И тогда тиристорный преобразователь можно представить апериодическим звеном 1-го порядка с постоянной времени Ттп=Тсифу.
Структурная схема силовой цепи системы ТП-Д:
Линеаризация характеристик тиристорного преобразователя(дополнительно, можно не писать)
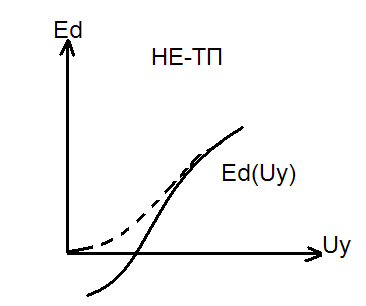
В РПТ хар-ка ТП с разомкнутым управлением становится существенно нелинейной. Для её линеаризации на входе ТП устанавливается нелинейное звено, хар-ка которого вбирается таким образом, чтобы результирующая хар-ка НЕ-ТП была линейной.
3. Принципы построения систем подчиненного регулирования и условия оптимизации контуров. Методы повышения точности регулирования в статических и динамических режимах.
При
создании системы подчиненного
регулирования эл. привода объект
регулирования (силовая часть эл. привода)
представляется в виде последовательного
соединения отдельных звеньев выходными
координатами которых являются существенные
координаты ( )
для управления каждой из координат
организуется отдельный контур
регулирования, имеющий свой регулятор.
Регуляторы соединяются последовательно,
так как выход одного является входом
другого, и каждый внутренний контур
подчинен внешнему.
)
для управления каждой из координат
организуется отдельный контур
регулирования, имеющий свой регулятор.
Регуляторы соединяются последовательно,
так как выход одного является входом
другого, и каждый внутренний контур
подчинен внешнему.
Идеальная оптимизация (выбор передаточной ф-ей регулятора и его параметра) была бы достигнута если контур обеспечивал мгновенное и без искажения воспроизведения входной координаты.


(2)
Однако такая оптимизация согласно условию (1) и (2) практически недостижима кроме того по условию (1) нецелесообразно т.к. контур при этом контур оказывается помеха не защищенным. Обычно оптимизацию сводят к получению предельных показателей качества для этого передаточная функция системы:
 (3)
(3)
Д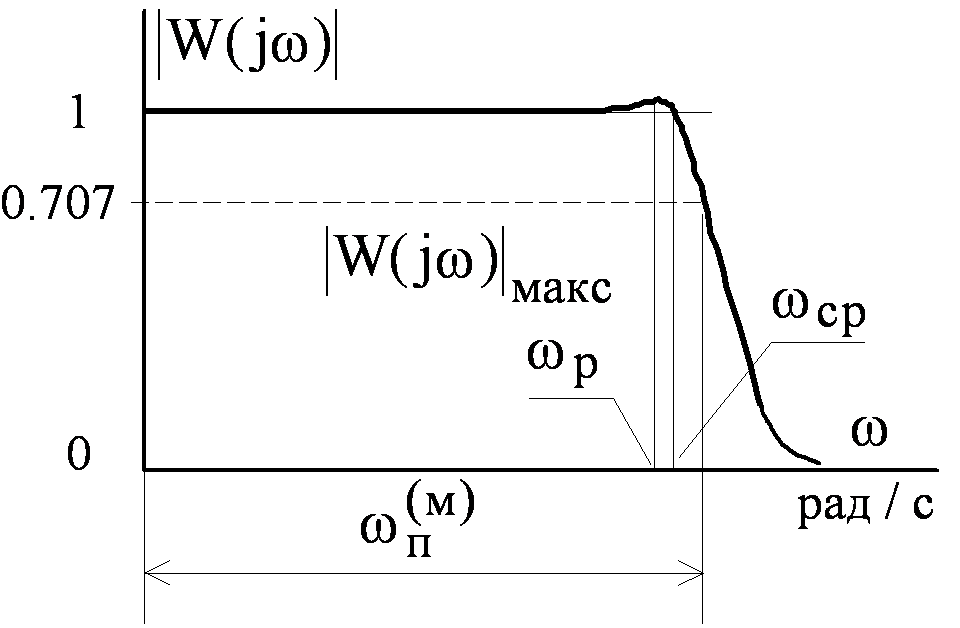 олжна
обеспечивать системе пропускания max
широкого спектра частот. Это имеет место
если max
большое число производных
олжна
обеспечивать системе пропускания max
широкого спектра частот. Это имеет место
если max
большое число производных
 при
при
 т.е
выполняется условие
т.е
выполняется условие
 (4)
(4)
Применив (3) и (4) получают систему условий:


Из
приведенных условий могут быть найдены
параметры передаточных ф-ий регулятора.
В прямом канале регулирования может
быть включено ограниченное число
инерционных звеньев с малыми постоянными
времени, которые заменяют одним
апериодическим звеном с постоянной
времени
 при
при
 и не более двух апериодических звеньев
с большими постоянными времени. Самым
сложным регулятором является ПИД
регулятор.
и не более двух апериодических звеньев
с большими постоянными времени. Самым
сложным регулятором является ПИД
регулятор.