

17.Настройка контура управления потокосцеплением ротора при векторном управлении на мо. Методика оптимизации, характеристики и качественные показатели.
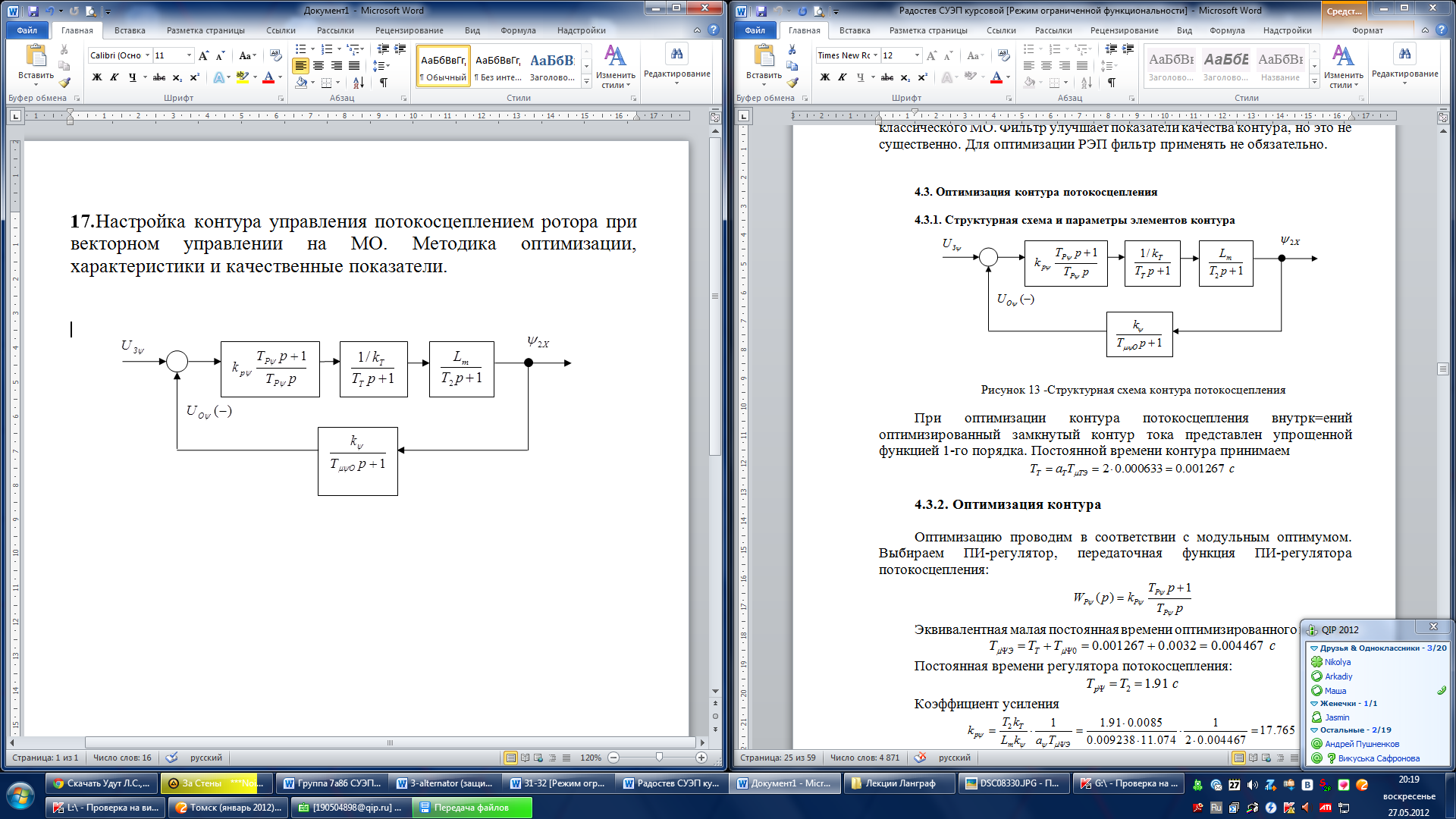
Структурная схема контура потокосцепления

При оптимизации контура потокосцепления внутренний оптимизированный замкнутый контур тока представлен упрощенной функцией 1-го порядка. Постоянной времени контура принимаем:
Выбираем ПИ-регулятор, передаточная функция ПИ-регулятора потокосцепления:
Эквивалентная малая постоянная времени оптимизированного контура:
Постоянная
времени регулятора потокосцепления:

Коэффициент
усиления:
 -коэффициент
обратной связи по току.
-коэффициент
обратной связи по току. -коэффициент
оптимизации Контур тока имеет следующие
передаточные функции:
-коэффициент
оптимизации Контур тока имеет следующие
передаточные функции:
Разомкнутый контур

Замкнутого контура
Показатели качества:
|
|
|
|
|
|
|
Ожидаемые показатели |
||||||
0.018 |
0.018 0.03 |
4.3 6.7 |
0 |
∞ |
1421,8 |
0.903 |







 0.03
0.03
18. Настройка контура управления скоростью при векторном управлении на со. Методика оптимизации, характеристики и качественные показатели.
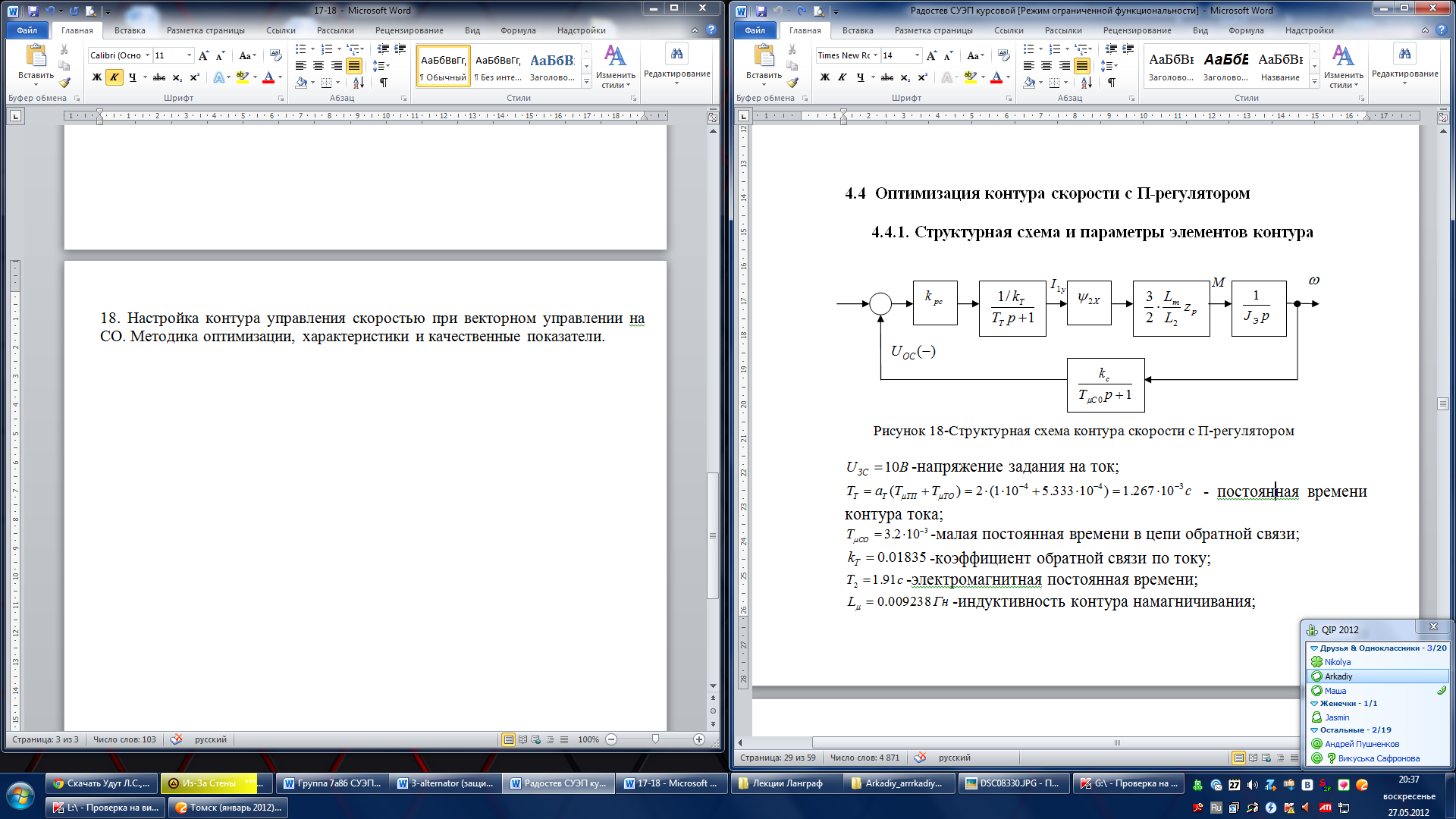 Передаточная
функция П-регулятора скорости
Передаточная
функция П-регулятора скорости

Коэффициент усиления
-коэффициент
обратной связи по току. -коэффициент
оптимизации.
-коэффициент
оптимизации.
Контур тока имеет следующие передаточной функции:
Разомкнутый контур

Замкнутого контура

|
|
|
|
|
|
Ожидаемые показатели |
|||||
0.014 |
4.3 6.7% |
0 |
- |
254.48 322.58 |
|


 0.02
0.02
19.Ограничения в системах управления для частотно-регулируемого электропривода переменного тока.
Ограничения на выходе регулятора тока ограничивают напряжение, соответственно на выходах регуляторов потокосцепления и скорости происходит ограничение токов. Вводятся ограничения:
- ограничение максимальной амплитуды напряжения, подводимого к обмоткам АД;
- ограничение токов, протекающих в обмотках статора АД;
- ограничение момента, развиваемого на
валу АД.
ограничение момента, развиваемого на
валу АД.
Ux – формирование магнитного потока в АД;
Uy – формирование момента вала АД;
Рекомендации для задания уровня ограничений
на выходе РТ: Ux = 0,312*Umax Uy = 0,95*Umax
Н еобходимо
ввести ограничения на выходе регуляторов
потокосцепления и скорости.
еобходимо
ввести ограничения на выходе регуляторов
потокосцепления и скорости.

Ix – намагничивающая часть составляющей тока статора АД;
Iy – составляющая пропорциональна моментному усилию, развиваемому на валу АД;
Imax – максимальный ток статора АД, кратковременно допускается перегрузка до 2…3*Iном.
Введение ограничений на выходе регуляторов приводит к значительному изменению характера переходных процессов, полученных ранее при оптимизации. Для приведения картины переходных процессов к удовлетворительному виду требуются дополнительные изменения структурной схемы системы управления.