

26. Методы повышения точности следящих систем при отработке управляющих воздействий.
1. Увеличение добротности.
У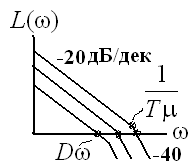 величение
добротности ограничено условием
устойчивости и ростом влияния помех.
величение
добротности ограничено условием
устойчивости и ростом влияния помех.
При
настройке внутреннего на
СО:
на
СО:
 ;
;
При
настройке внутреннего
на
МО:
 ;
;
При
настройке на МО
 будет
больше чем на СО, точность будет выше в
два раза.
будет
больше чем на СО, точность будет выше в
два раза.
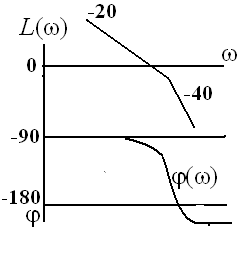
2. Повышение порядка астатизма
Н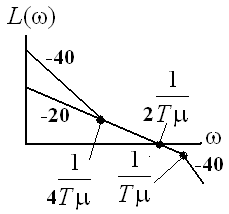 астройка
должна быть наСО выбираем ПИ регулятор:
астройка
должна быть наСО выбираем ПИ регулятор:
 ;
;
 ;
;
 ;
;
Настройка внутреннего контура скорости на МО:
 ;
;
 ;
;
 ;
;
 ;
;
Внутренний контур скорости настроенный на СО:
 ;
;
 ;
;

 Показатели
качества контура положения
Показатели
качества контура положения
|
|
|
|
|
|
|
МО |
0 |
52 |
|
|
|
|
СО |
0 |
50,9 |
|
|
|
|















 ;
;
 ;
;
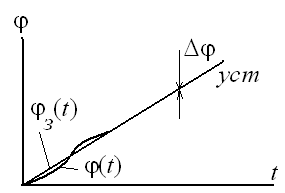
При отработке линейно нарастающего входного сигнала:
 ;
;
 ;
;
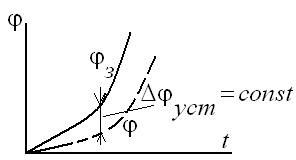
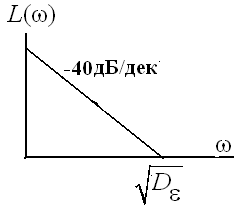
Если
входное воздействие параболическое,
при настройке контура положения на СО,
то ошибка постоянна по величине
 поэтому
по аналогии с понятием добротности по
скорости вводят понятии добротности
по ускорению:
поэтому
по аналогии с понятием добротности по
скорости вводят понятии добротности
по ускорению:
 .
.
Чем выше порядок астатизма тем выше точность в установившимся режиме, система с астатизмом 1-го порядка обеспечивает нулевую статическую ошибку. Система с астатизмом 2-го порядка обеспечивает нулевую скоростную ошибку. В системах с астатизмом выше 2-го порядка трудно обеспечить устойчивость, поэтому практически их трудно реализовать.
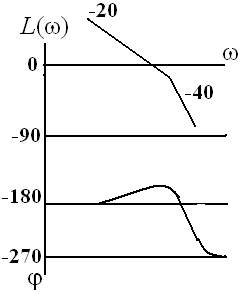
С увеличением порядка астатизма условие устойчивости ухудшаются.
29. Задачи адаптивного управления, области целесообразного применения. Основные принципы построения адаптивных систем, применяемых в электроприводах.
Не стационарность работы ЭП зависит от способов управления двигателями и свойств механизмов. В процессе эксплуатации изменение параметров ЭП происходит в следствии изменения:
- параметров электромагнитного контура преобразователь – двигатель.
- коэффициента передачи преобразователя
- потока возбуждения
- момента инерции
- частоты упругих колебаний механической системы
- взаимное изменение механических параметров взаимосвязанных систем много д-ой. ЭП
Область применения: Применяется для управления нелинейной системой, и или системой с переменными параметрами. К примерам таких систем относят, например, асинхронные машины, транспортные средства на магнитной подушке, магнитные подшипники и т.п. Среди механических систем можно назвать инверсный маятник, подъемно транспортные машины, роботы, шагающие машины, подводные аппараты, самолеты, ракеты, многие виды управляемого высокоточного оружия и т.п.
Б ОИ
– блок обработки информации
ОИ
– блок обработки информации
БППР – блок перестройки регулятора
Задачи адаптивного управления
1. При изменении параметров системы выполнить такие изменения в СУ при которых статические и динамические свойства системы при заданных воздействиях сохранятся.
2. При отсутствии информации о ЭП и возможных воздействиях выполнить автоматический поиск оптимальных условий работы.
Основные принципы построения адаптивных систем: Решение второй задачи связано с поиском оптимальных режимов работы системы. – перенастройка параметров системы путём изменения параметров регуляторов, таким образом, чтобы обеспечить оптимальный режим работы системы.
Решение первой задачи может быть в ряде случаев может быть выполнено применением простых методов компенсации неизменяющихся параметров систем ЭП. К примеру применить внутренние обратные связи, охватывающие часть структуры ОУ с нестационарными параметрами и обеспечит определённую избыточность оп быстродействию контуров. Наряду с этим могут быть применены рзнообразные системы адаптации: идентификация системы – путём её возбуждения и автоматической перенастройкой параметров или структуры управляющей части, а также введения дополнительный сигналов.
30. Классификация адаптивных систем управления. Особенности самонастраивающихся и самоорганизующихся адаптивных систем. Принцип действия безпоисковых и поисковых адаптивных систем. Техническая база реализации.
Адаптивные САУ ЭП делятся на:
- беспоисковые
- поисковые (до работы задают пробные движения или воздействия)