

9. Особенности построения и оптимизации сау рэп, связанные со свойствами тиристорного преобразователя.
Специфические особенности работы тиристорного преобразователя:
1.
Дискретный
характер управления,
выражающийся в том, что управляющее
напряжение
 на входе СИФУ воздействует на формирование
выходной ЭДС управляемого выпрямителя
на входе СИФУ воздействует на формирование
выходной ЭДС управляемого выпрямителя
 лишь в дискретные моменты времени
отпирания тиристоров.
лишь в дискретные моменты времени
отпирания тиристоров.
2.
Неполная
управляемость,
проявляющаяся в неодинаковом характере
переходных процессов при увеличении и
уменьшении управляющего напряжения
.
При увеличении угла управления
 ,
вследствие невозможности закрыть по
цепи управления проводящий тиристор,
ЭДС управляемого выпрямителя
не может изменяться быстрее, чем
напряжение одной из питающих фаз. Это
определяет критическую скорость
изменения угла управления выпрямителем
(3.5)
,
вследствие невозможности закрыть по
цепи управления проводящий тиристор,
ЭДС управляемого выпрямителя
не может изменяться быстрее, чем
напряжение одной из питающих фаз. Это
определяет критическую скорость
изменения угла управления выпрямителем
(3.5)
 (3.13)
(3.13)
и накладывает ограничение на максимально допустимую скорость изменения управляющего напряжения:

3.
Наличие
пульсаций в кривой выходной ЭДС
управляемого выпрямителя
с частотой
 ,
,
 ,
или, соответственно,
,
или, соответственно,
 ,
Гц.
,
Гц.
4. Скачкообразное изменение структуры и параметров силовой цепи системы управляемый выпрямитель – нагрузка при каждом переходе выпрямителя из рабочего режима в режим коммутации вентилей и наоборот и при переходе из режима непрерывного тока в режим прерывистого тока и наоборот.
Математическое описание и структурная схема силовой цепи. Параметры.
СИФУ
является дискретным элементом преобразуя
непрерывное напряжение управления Uу
в дискретную функцию моментов включения
тиристоров.
Учитывая что mв
временного запаздывания не вносит, ТП
можно представить звеном чистого
запаздывания: ,
которое апроксимируется апериодическим
звеном 1го порядка
,
которое апроксимируется апериодическим
звеном 1го порядка
Если считать что временного сдвига между входным сигналом α и первой гармоникой ЭДС нет то управляемый выпрямитель можно считать безинерционным звеном 1-го порядка с коэффициентом передачи Кув. И тогда тиристорный преобразователь можно представить апериодическим звеном 1-го порядка с постоянной времени Ттп=Тсифу.

Рис.Структурная схема собственно тиристорного преобразователя
 с
– постоянная времени управляемого
выпрямителя, определяемая его неполной
управляемостью, с.
с
– постоянная времени управляемого
выпрямителя, определяемая его неполной
управляемостью, с.
где

 -
определяется по выражениям, приведенным
в подразделе;
-
определяется по выражениям, приведенным
в подразделе;
 (3.32)
(3.32)
для линейного участка регулировочной характеристики управляемого выпрямителя;
Структурная схема силовой цепи системы ТП-Д:
10. Асинхронный двигатель как объект управления, естественные и искусственные статические характеристики, имитационная модель в стационарной системе координат.
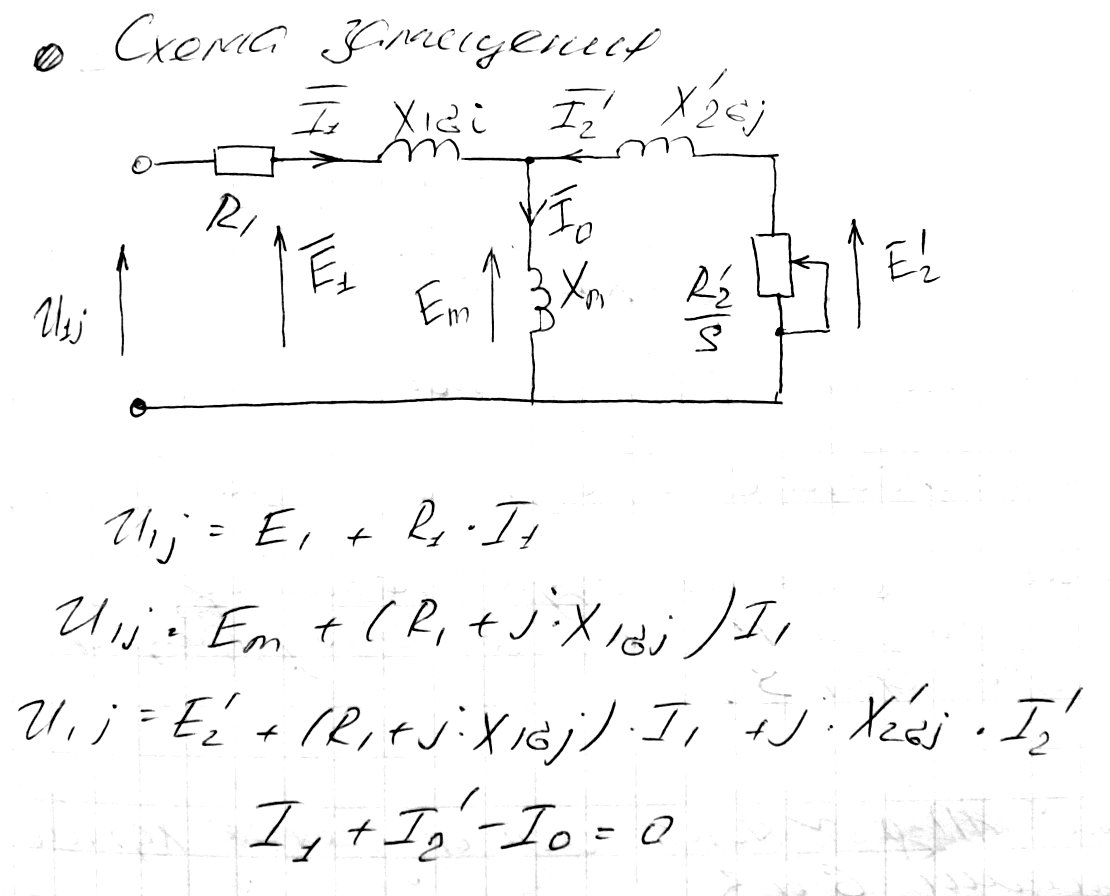
Расчетные выражения для механических и электромеханических характеристик асинхронного двигателя могут быть получены на основании наиболее часто используемой Т-образной схемы замещения.
Режимы работы АД
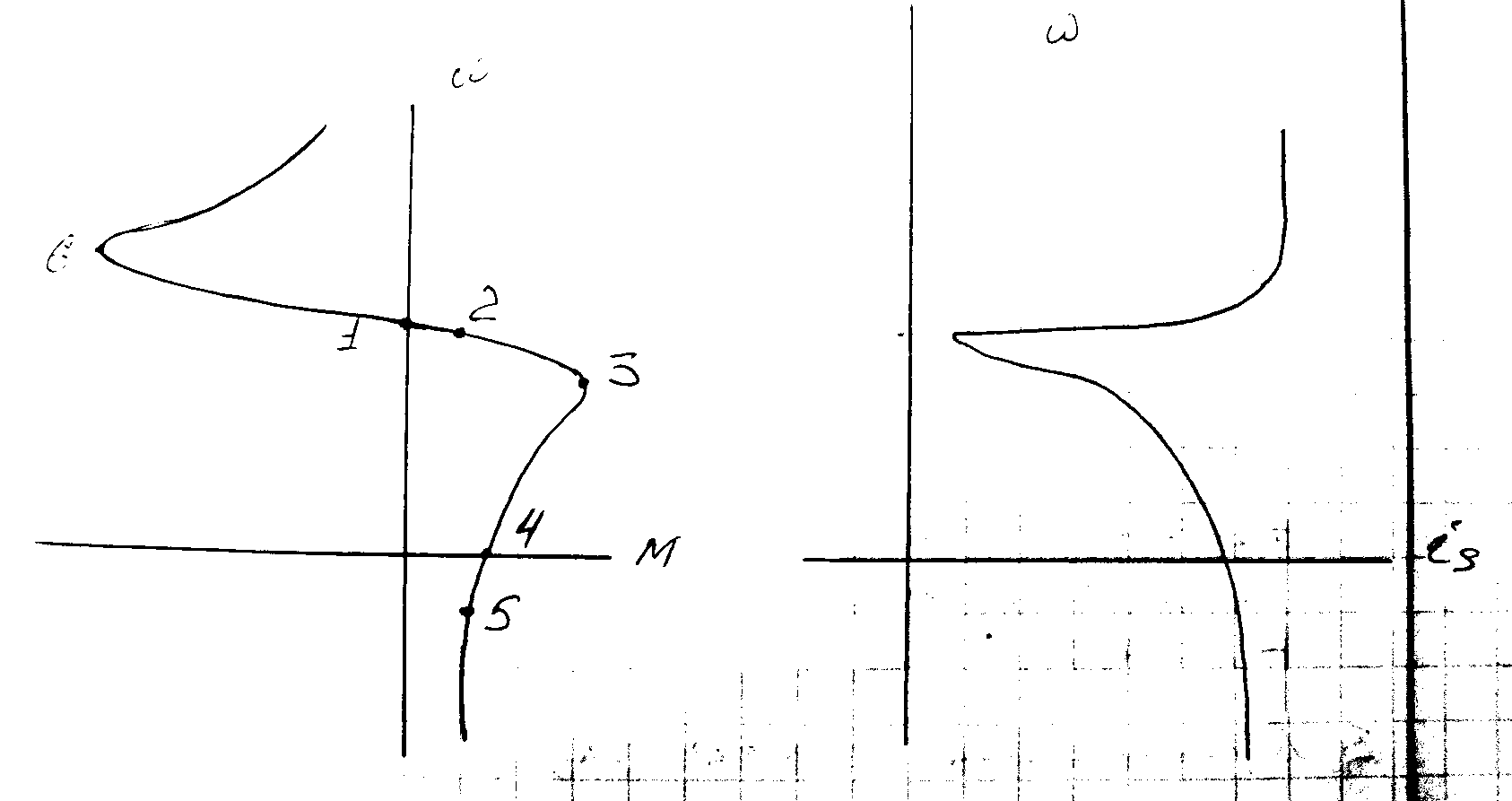
1. Х.Х, поле статора=поле ротора
2. ном.нагрузка двигателя, соот-ет макс. кпд и мин потерям мощности
3. критический момент двигателя, допускает кратковременную форсировку, для длит. Режимов не применяется S1=NO!
4. пусковой момент (в регулируемом ЭП-де не исп-ся)
5. противовключение (в регулируемом ЭП-де не исп-ся)
6. критический момент для генераторного режима, частота вращения ротора r превышает частоту вращения поля статора s.
Регулируемый ЭП-д переменного тока исп-ет участок характеристике м/у точками 6 и 3.
Способы управления АД:
Введение Rдоб в цепь статора
+ снижение момента
- большие потери
2. Введение Rдоб в цепь ротора
+ эффективное средство для ограничения тока и момента АД
- потери
3. Переключение числа пар полючов
+ расширение диапозона регулирования без использования доп. преобразователей
- необходимы спец. двигатели, высокая стоимость, низкие энергет. показатели.
4. Введени ЭДС в цепь ротора (только АД с ФР)
5. Частотно регулирование и напряжения и частоты. Достигается петем применения преобразователей частоты и тиристорных регуляторов напряжения.
Скалярное управление
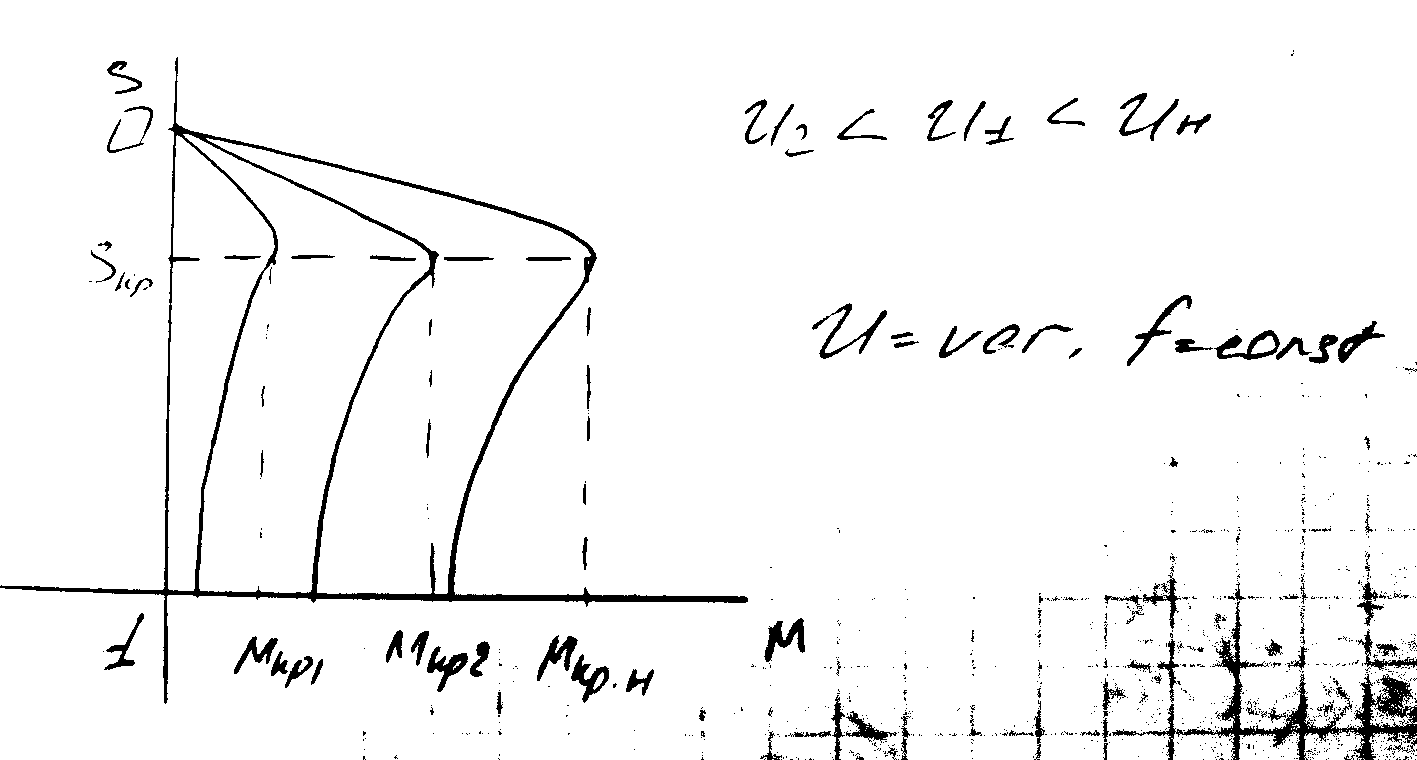
«-» крайне низкий КПД ЭП-да, малый диапазон регулирования; Применяется в условиях редких пусках, применение ТРН позволяет снизить стоимость ЭП-да.

Т.к. изменяется частота происходит изменение индуктивного сопротивления двигателя(Xl=wl)
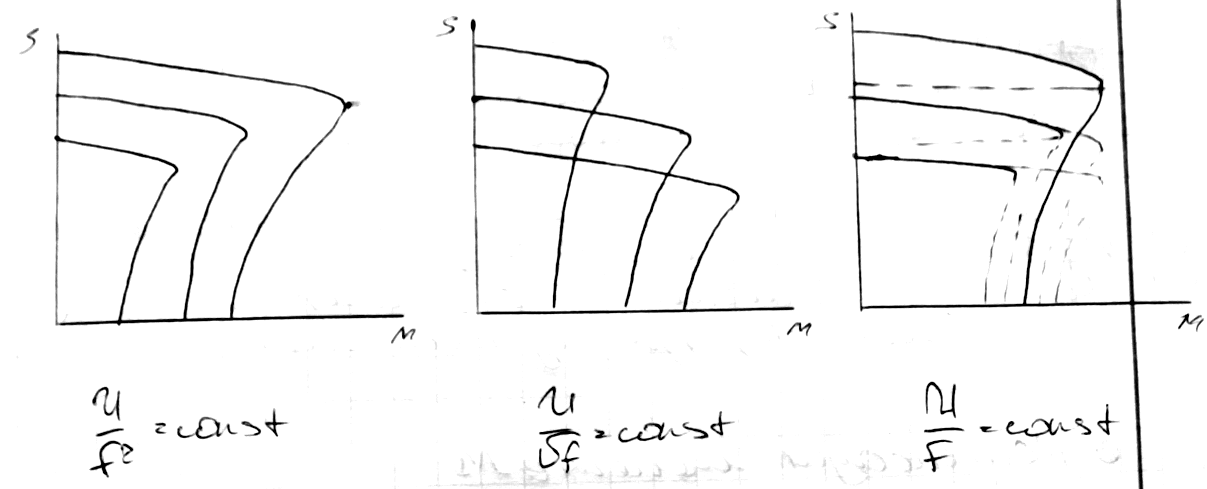
Для получения большего диапозона регулирования СУЭП перем. Тока должна одновременно изм-ся и частота и напряжение. Закон Костенко.

Для обеспечения опт.работы АД при всех значениях частоты и нагрузки, относительные напр-я двигателя необходимо изменять пропорционально произведению относительной частоты на корень квадратный из отн-го момента двигателя.
Закон Костенко не учитывает падение напр-я статора в его активном сопротивлении, насыщение магн.цепи и эффект вытеснения токов в роторе.
Система
уравнений, описывающих работу асинхронного
двигателя с короткозамкнутым ротором
в неподвижной системе координат
 ,
получена на основе уравнений (1.7) – (1.9)
и имеет вид:
,
получена на основе уравнений (1.7) – (1.9)
и имеет вид:

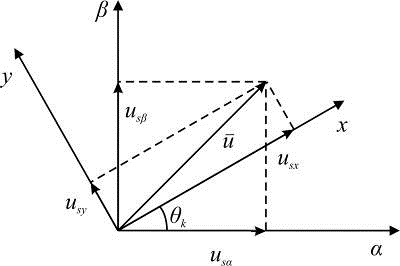
где
 – синусоидальная
по форме составляющая
напряжения статора по оси
ортогональной неподвижной системы
координат
,
В;
– синусоидальная
по форме составляющая
напряжения статора по оси
ортогональной неподвижной системы
координат
,
В;
 – косинусоидальная
по форме составляющая
напряжения статора по оси
– косинусоидальная
по форме составляющая
напряжения статора по оси
 системы координат
,
В;
системы координат
,
В;
 – амплитудное
значение фазного напряжения статорной
обмотки, В;
– амплитудное
значение фазного напряжения статорной
обмотки, В;
 – действующее
значение фазного напряжения статорной
обмотки, В;
– действующее
значение фазного напряжения статорной
обмотки, В;
 – частота
напряжения статора, Гц;
– частота
напряжения статора, Гц;
 ,
,
 – составляющие
тока статора в системе координат
,
А;
– составляющие
тока статора в системе координат
,
А;
 ,
,
 – составляющие потокосцепления ротора
в системе координат
,
Вб;
– составляющие потокосцепления ротора
в системе координат
,
Вб;
 – электромагнитный
момент двигателя,
– электромагнитный
момент двигателя,
 ;
;
 – момент
статического сопротивления на валу
двигателя, включая собственный момент
трения двигателя,
;
– момент
статического сопротивления на валу
двигателя, включая собственный момент
трения двигателя,
;
 – коэффициент
рассеяния;
– коэффициент
рассеяния;
 – момент
инерции двигателя,
– момент
инерции двигателя,
 .
.
В операторной форме записи система уравнений (1.17) принимает вид:

где

Уравнениям системы (1.18) соответствует структурная схема асинхронного электродвигателя с короткозамкнутым ротором в неподвижной системе координат статора , , приведенная на рис. 1.9.
Рис. 1.9. Структурная схема асинхронного электродвигателя в неподвижной системе координат статора ,
11. Так как асинхронный двигатель при настройке контуров управления представляется в виде двухфазной электрической машиной, то кроме классических регуляторов в системе присутствуют специальные математические преобразования. Кроме того в асинхронном электродвигателе нет возможности регулировать поток и ток независимо друг от друга, и поэтому обе эти составляющие в итоге должны регулироваться только с помощью напряжения, подаваемого на статор.
12. Так как системы управления асинхронных регулируемых электроприводов базируются на представлении асинхронного двигателя двухфазной электрической машиной, то для согласования самого двигателя с системой управления необходимы преобразования координат.
Преобразование Кларка необходимо для перехода от трехвекторной системы к двухвекторной для упрощения расчетов. Преобразования производятся из учета абсолютной симметрии в фазах. Формулы для преобразования имеют вид:


Преобразование Парка-Горева необходимо для перехода от неподвижной ко вращающейся системе координат, что позволяет сориентировать систему управления по вектору потокосцепления.


Для вычисления вектора потокосцепления используем формулу:

Обратное преобразование Парка-Горева вычисляется следующим образом:


Преобразование Парка-Горева:
13. Система компенсации момента при скалярном управлении асинхронным двигателем. Назначение, основные параметры и влияние на характеристики электропривода.
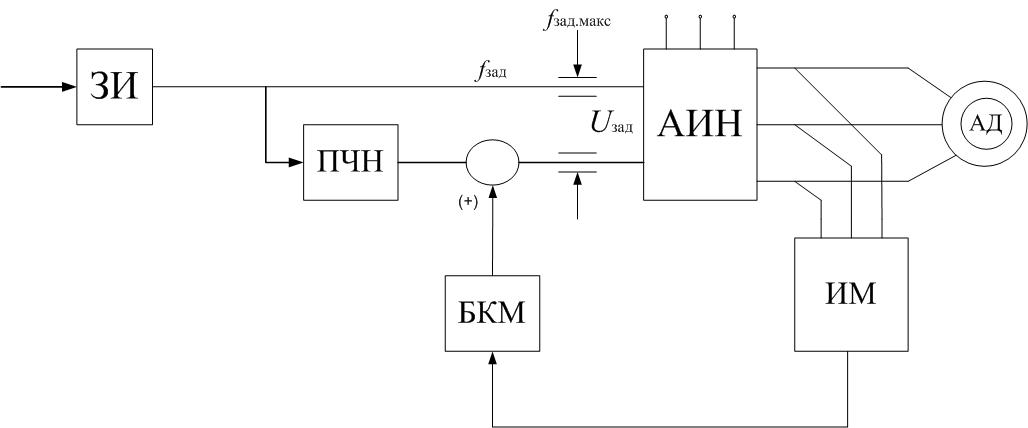
ИМ – индитификатор момента
БКМ – блок компенсации момента
ПЧН – преобразователь частоты, напряжения
АИН – автономный инвертор напряжения
Система компенсации момента позволяет оптимизировать формирования напряжения, подводимое к статору АД, в зависимости от текущего момента нагрузки на валу двигателя.
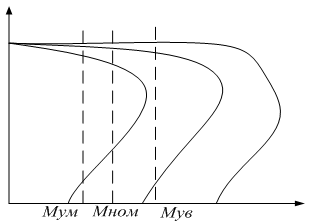
БКМ:
К омпенсация
момента является ПОС (положительной
обратной связью) и необходимо принимать
дополнительные меры для сохранения
устойчивой работы ЭП:
омпенсация
момента является ПОС (положительной
обратной связью) и необходимо принимать
дополнительные меры для сохранения
устойчивой работы ЭП:
Постоянная времени TКМ снижает быстродействие обратной связи;
ККМ – изменяет глубину обратной связи;
Ограничение на выходе БКМ.
1 4.
Система компенсации скольжения при
скалярном управлении асинхронным
двигателем. Назначение, основные
параметры и влияние на характеристики
электропривода.
4.
Система компенсации скольжения при
скалярном управлении асинхронным
двигателем. Назначение, основные
параметры и влияние на характеристики
электропривода.
При работе АД ЭП с большим диапазоном изменения нагрузки на валу АД, возникает статическая ошибка, пропорциональная величине скольжения и моменту нагрузки.
ИМ – индитификатор момента
БКС – блок компенсации Скольжения
ПЧН – преобразователь частоты, напряжения
АИН – автономный инвертор напряжения
При скалярном регулировании скорости АД для устранения ошибки увеличивают частоту напряжения статора (двигательный режим) на величину скольжения S определяемого нагрузкой на валу АД.
БКС:К омпенсация
скольжения является ПОС (положительной
обратной связью) и необходимо принимать
дополнительные меры для сохранения
устойчивой работы ЭП.
омпенсация
скольжения является ПОС (положительной
обратной связью) и необходимо принимать
дополнительные меры для сохранения
устойчивой работы ЭП.
Точность работы системы компенсации скольжения напрямую определяются точностью косвенного определения момента нагрузки.

В ПЧ принято регулировать коэффициент компенсации скольжения для двигательного и для генераторного режима работы.