33. Адаптивные системы с самонастройкой. Принцип действия, структура.
С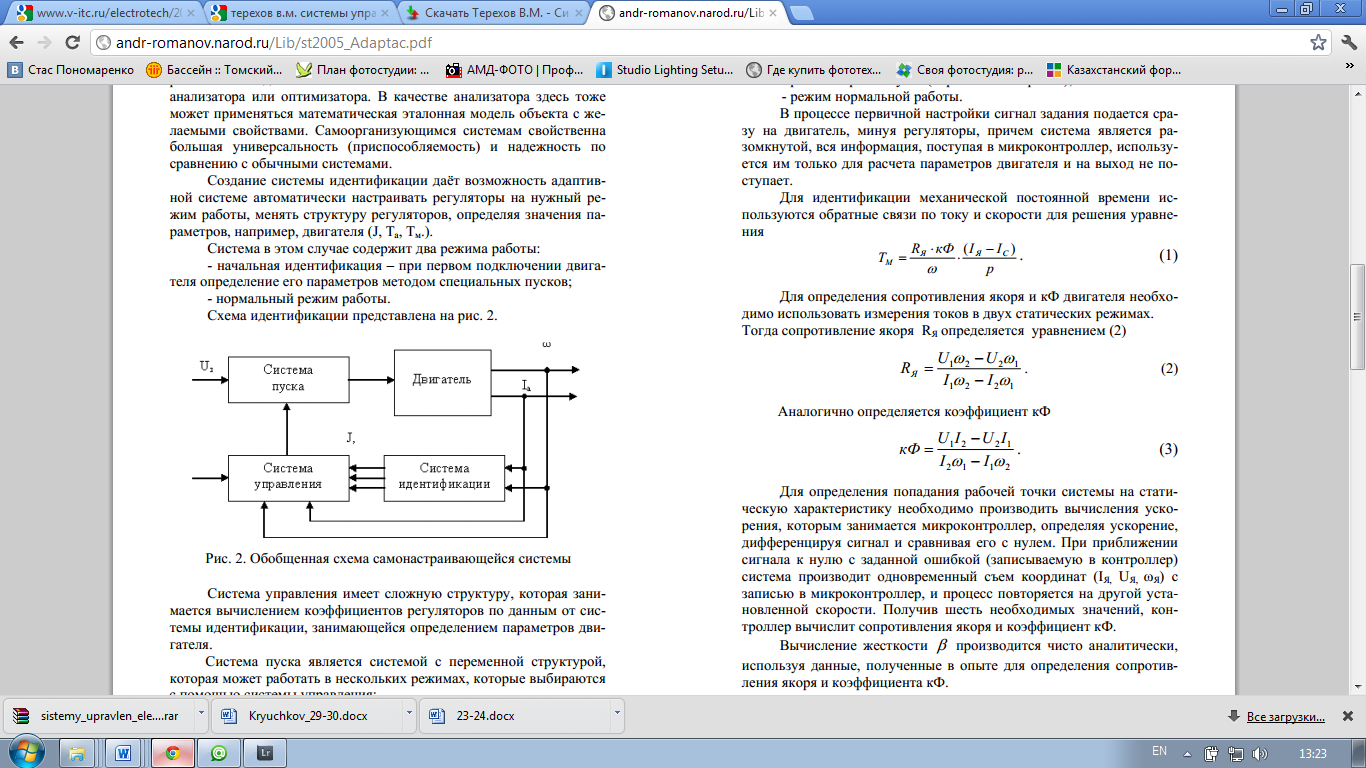 истемы
с самонастройкой параметров являются
в настоящее время основным видом
адаптивных систем управления, в которых
автоматически, не заданным заранее
образом изменяются какие-либо параметры
системы управления при изменении
параметров объекта регулирования и
элементов регулятора, а также характеристик
возмущающих воздействий.
истемы
с самонастройкой параметров являются
в настоящее время основным видом
адаптивных систем управления, в которых
автоматически, не заданным заранее
образом изменяются какие-либо параметры
системы управления при изменении
параметров объекта регулирования и
элементов регулятора, а также характеристик
возмущающих воздействий.
Система управления имеет сложную структуру, которая занимается вычислением коэффициентов регуляторов по данным от системы идентификации, занимающейся определением параметров двигателя.
Система пуска является системой с переменной структурой, которая может работать в нескольких режимах, которые выбираются с помощью системы управления:
- режим первого пуска (первичная настройка);
- режим нормальной работы.
Для реализации инвариантности контура к изменению сопротивления и индуктивности якоря целесообразно использовать адаптивную систему с эталонной моделью и сигнальной самонастройкой. При применении сигнальной самонастройки применяется блок адаптивного управления (БАУ), который включает в себя эталонную модель WМ, а также корректирующее звено WК. (рис. 3).
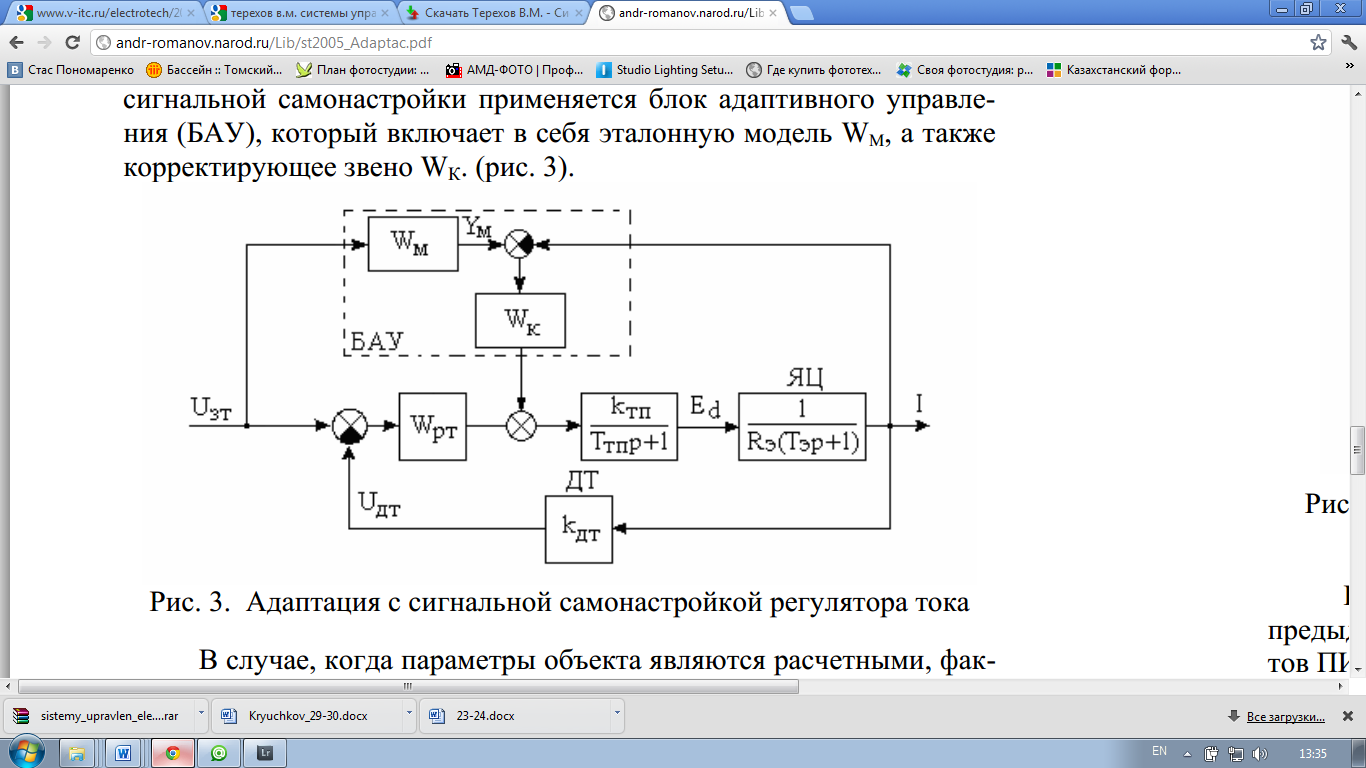
В схеме на рис. 4 использование блока адаптации аналогично предыдущему за тем исключением, что здесь значения коэффициентов ПИ-регулятора можно не рассчитывать вручную, поскольку БАУ сам подстроит значения регулятора тока и при этом сохранит его. При этом. первый запуск системы будет достаточно продолжительным (пока БАУ выйдет на нужный коэффициент усиления), а затем уже как в обычной системе подчиненного управления. В системе, представленной на рис. 4, корректирующее звено
имеет интегрирующие свойства и выступает в роли памяти.
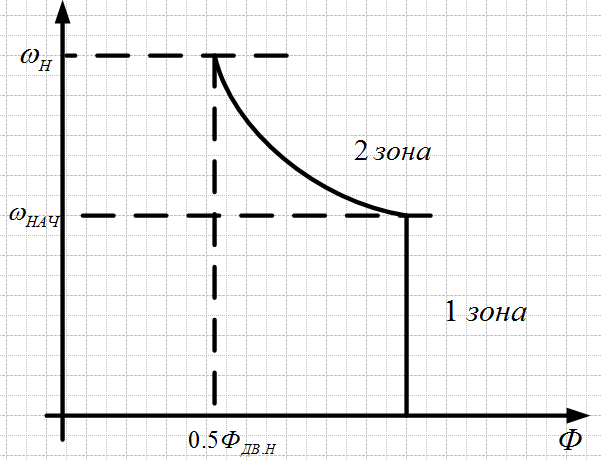
34. Реализация адаптивных регуляторов в однозонных тиристорных электроприводах постоянного тока.
Рассмотрим один из вариантов технической реализации адаптивного регулятора тока.
Регулятор состоит из последовательно соединенных звеньев: пропорционально интегрального (ДА1), апериодического (R4 – C2) и пропорционального (ДА2).
БУР – блок управления регулятором.
ЛБ – логический блок: фиксирует моменты отсутствия тока и выдает в этом случае сигнал на БУР.
Режим непрерывного тока: R4 зашунтирован контактом К1, R5 = R6, то есть передаточный коэффициент усиления ДА2 = 1. ПИ-регулятор настроен на оптимум по модулю при непрерывном токе.
Режим прерывистого тока: ЛБ запускает БУР, размыкается К1. Постоянная времени цепочки R4 – C2 равна постоянной времени ПИ-звена на ДА1. Таким образом, их последовательное соединение дает И-звено.
 ;
;
при
 :
:
 .
.
Управление ключом К2 осуществляется с помощью ШИМ, со скважностью, пропорциональной квадрату угла . Меняя скважность замыкания К2 – меняется среднее значение выходного напряжения регулятора, а значит, меняется и коэффициент усиления интегрирующего звена.
35. Адаптивные системы – это системы, которые приспосабливаются к изменяющемуся объекту управления и становятся нечувствительными к изменению параметров, структуре объекта, возмущениям действующем на ОУ. Системы у которых с течением времени изменяются параметры называются нестационарными. Адаптивные системы управления ЭП:
1) Поисковые. 2) Безпоисковые.
Для безпоисковых систем выполняется предвар-ая оптимизация по исходным параметрам и при решении задачи адаптации сохранить оптимальную настройку системы. Если начальные параметры отсутствуют нужно решить задачу поиска оптимальных режимов работы, а потом оптимизировать систему. Для реализации адаптивной системы необходимо устройство для определения параметров структуры управления.
П
 рямой
(+ точность, - сложность и стоимость)
рямой
(+ точность, - сложность и стоимость)Косвенный (+ простота, - погрешность)
ИД Возм – идентификатор возмущения.
ИД парам – идентификатор параметров
Пример – КС РЭП ДПТ
 В
итоге коэффициент усиления зависит от
эквивалентного момента инерции и
магнитного потока двигателя.
В
итоге коэффициент усиления зависит от
эквивалентного момента инерции и
магнитного потока двигателя.

36.

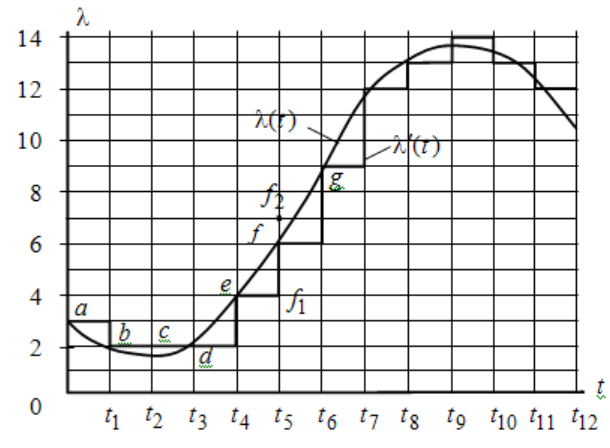
При квантовании по уровню передаваемые значения могут следовать друг за другом с переменным шагом ∆t. При квантовании по времени найденные значения непрерывной величины в дискретные моменты времени чередуются через строго определенные интервалы времени ∆t (шаг квантования), но имеют самую разнообразную амплитуду (уровень).
В некоторых случаях квантование осуществляется с заданными шагами квантования, как по времени, так и по уровню. На рис. а) показано, как производится квантование по уровню и по времени функции (t). Сначала проводятся линии, параллельные оси с шагом t, затем уровни с шагом q, параллельные оси времени. Квантование осуществляется путем замены через время t значений функции (t) ближайшим дискретным уровнем. Проследим по рис., как находятся эти точки.