

20.Системы управления положением, работающие в режиме позиционирования. Требования к электроприводу.
Задача позиционирования – переместить рабочий орган механизма в заданное положение с требуемой точностью.
Требования к электроприводу:
- обеспечение требуемой точности позиционирования
- обеспечение минимального времени позиционирования (выбор оптимальной траектории)
- характер переходного процесса (без перерегулирования)
Принцип построения реализуется на базе регулируемого ЭП постоянного или переменного тока с использованием принципов подчиненного регулирования с контурами тока, скорости и положения.
 РП
– регулятор положения
РП
– регулятор положения
Кп – коэффициент обратной связи по положению;
 – угловое
перемещение;
– угловое
перемещение;
РЭП – регулируемый электропривод.
21. В работе позиционного эп можно выделить 3 вида перемещения:
1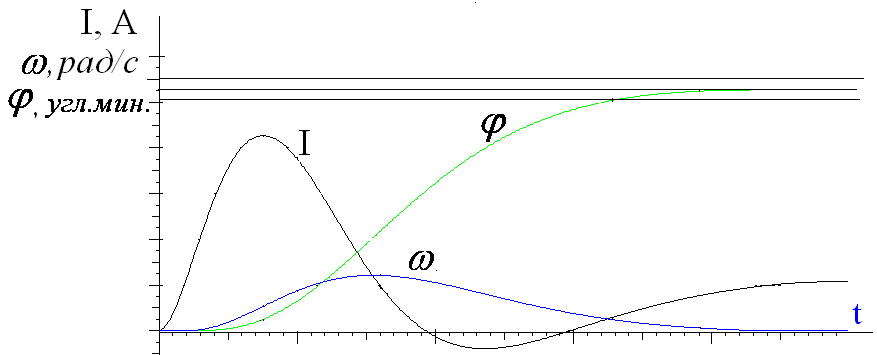 .Малые
перемещения. Система работает без
ограничения координат тока и скорости.
Система работает как линейная. Показатели
качества совпадают с ожидаемыми.
.Малые
перемещения. Система работает без
ограничения координат тока и скорости.
Система работает как линейная. Показатели
качества совпадают с ожидаемыми.
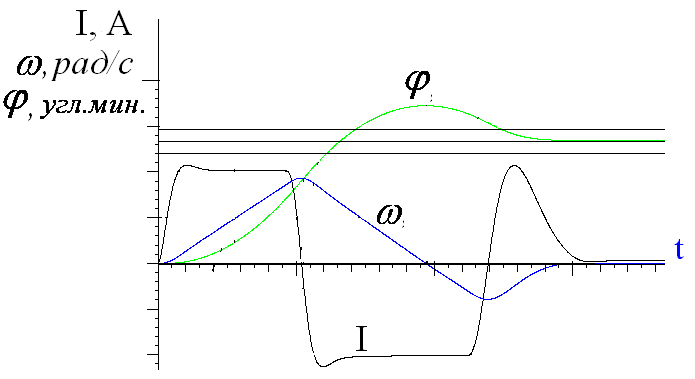
2.Средние перемещения. Ток электродвигателя достигает своего предельного значения, а привод предельного ускорения; процесс отработки средних перемещений в нелинейной системе сопровождается увеличением перерегулирования и времени переходного процесса.
3. Большие перемещения. Ток и скорость электродвигателя достигают своих предельных значений; процесс отработки больших перемещений сопровождается значительным перерегулированием.
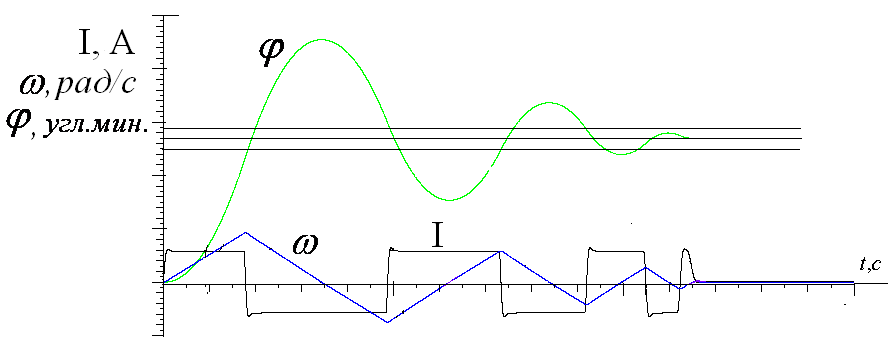
Таким образом из графиков следует что для уменьшения перерегулирования Крп должен быть переменным
При отработке средних и больших перемещений система становиться нелинейной. Ограничения тока и скорости реализуются за счет ограничителя на выходах регуляторов тока и скорости. Минимизировать время переходного процесса удается за счет реализации
треугольной диаграммы скорости (внизу блядь нарисована) с одинаковым временем разгона и торможения.
Т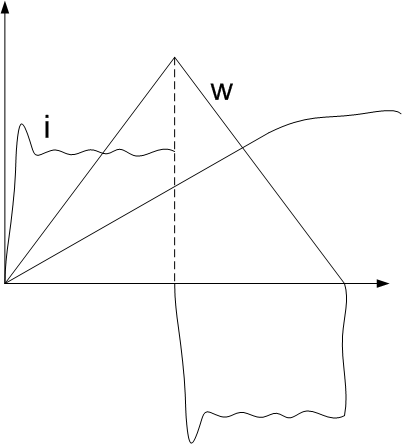 акой
график скорости получается если
использовать параболический регулятор
положения.
акой
график скорости получается если
использовать параболический регулятор
положения.
Параболический регулятор положения
Продифференцируем выражение

 ;
;
 обычно в 4 раза
обычно в 4 раза
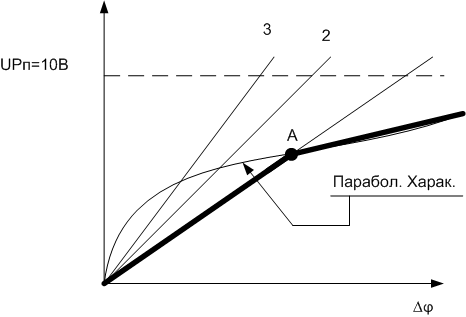 1,2,3
– при пропорциональном регуляторе. При
малых перемещениях (меньше А) коэф.
усиления регулятора стремится к
бесконечности., по этому на нач. участках
характеристики регулятор работает на
лин. характеристики. после точки А
регулятор работает на параболической
характеристики.
1,2,3
– при пропорциональном регуляторе. При
малых перемещениях (меньше А) коэф.
усиления регулятора стремится к
бесконечности., по этому на нач. участках
характеристики регулятор работает на
лин. характеристики. после точки А
регулятор работает на параболической
характеристики.
Настройка рег-а. для каждого заданного перемещения подбираются значения Крп обеспечивающие желаемый вид перех. процесса без перерегулирования.
22.
Принцип построения реализуется на базе регулируемого ЭП постоянного тока с использованием принципов подчиненного рег-я с контурами тока, скорости и положения.
Оптимизация контура положения.
В приводах работающих в режиме позиционирования контур настраивается на МО.
K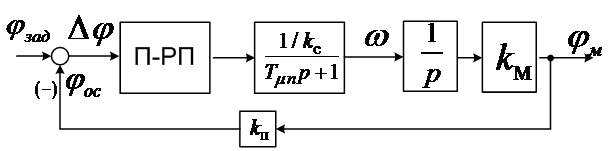 м-
коэф. передачи мех-а (редуктор)
м-
коэф. передачи мех-а (редуктор)
Кп- коэф. обр. связи по положению.
П – регулятор.
 Т-
малая пост. времени.
Т-
малая пост. времени.
При
настройке контура скорости на МО

При
настройке контура скорости на СО

разомкнутый
контур положения.
 функция
замкнутого контура.
функция
замкнутого контура.

Если Контур скорости На МО |
Если Контур скорости На СО |
|
|











