

23. Повышение точности позиционных систем электропривода. Параболический регулятор положения.
При отработки средних и больших перемещениях система является нелинейной, ограничения тока и скорости реализуется за счёт ограничений на выходах регуляторов скорости и положения.
Минимизировать время ПП удается за счёт реализации треугольной диаграммы скорости с одинаковым временем разгона и торможения.
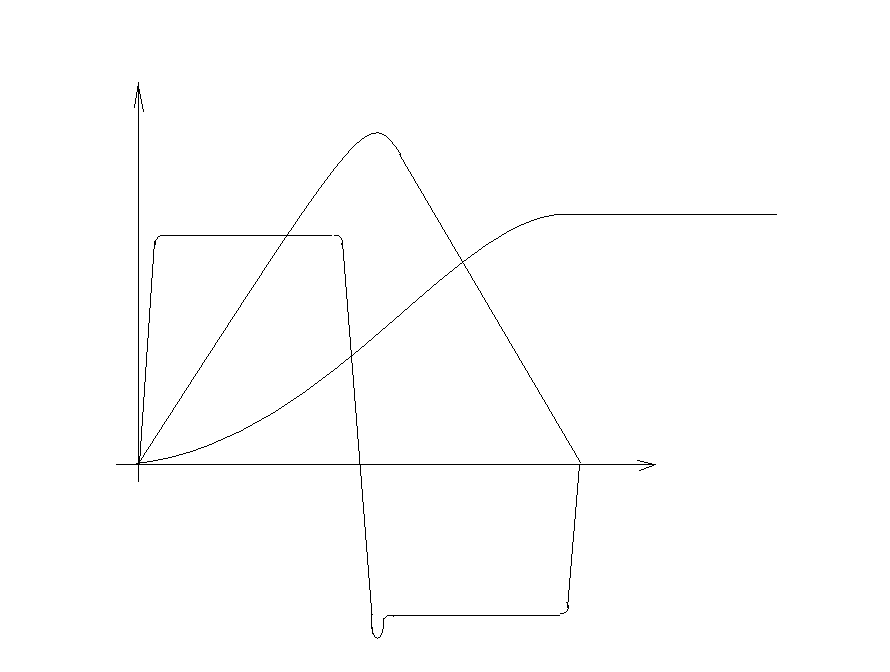





График скорости, близкий к треугольной форме может быть получен при использовании регулятора положения с нелинейной характеристикой, парабалический регулятор положения

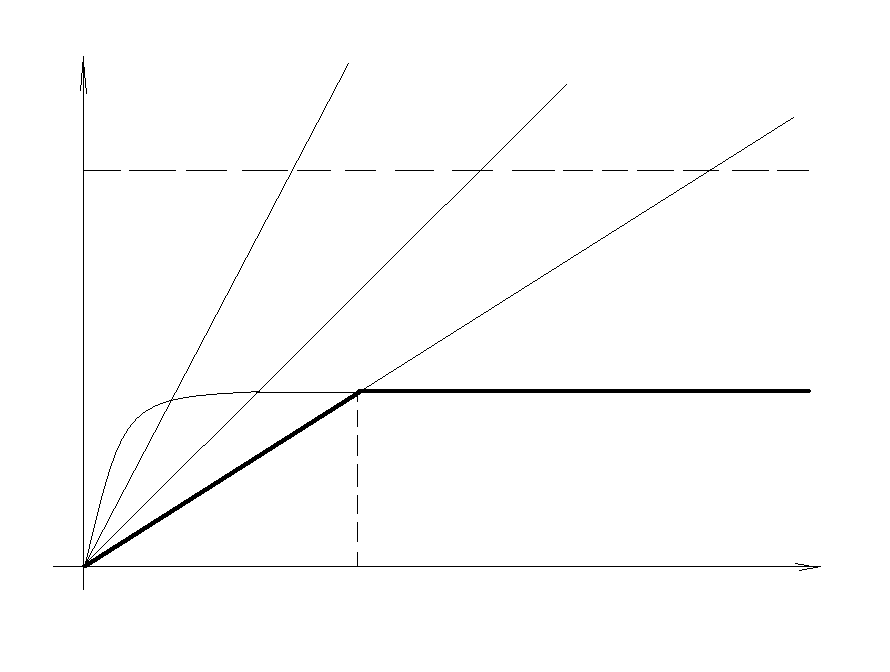








При малых перемещениях (линия А) коэффициент усиления параболического регулятора становится бесконечно большим, поэтому начальный участок характеристики параболического регулятора положения (до т.А) делают линейным в соответствии с настройкой на МО.
На практике настройку параболического регулятора положения осуществляют следующим образом: для каждого задают перемещение, подбирают значение Крп обеспечивающий желаемый вид ПП без перерегулирования в контуре положения.
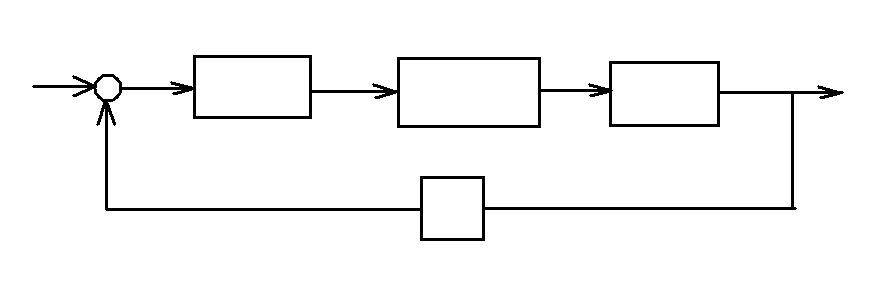
24. Синтез систем управления положением, работающих в следящем режиме. Структурная схема, методика оптимизации контуров регулирования.
Задача следящего ЭП заключается в обеспечении перемещения исполнительного органа в соответствии с изменяющимся по произвольному закону управляющему воздействию при ошибке не превышающей допустимых значений в условиях воздействия на систему внешних возмущений.
В следующем режиме ни один из регуляторов не входит в насыщение, поэтому систему можно рассматривать как линейную.
Полная количественная оценка точности СЭП должна быть произведена при совместном действии управляющих и возмущающих сигналов













П ри
настройке КП на МО:
ри
настройке КП на МО:
ошибка:

С
 тупенчатый
вх. сигнал
тупенчатый
вх. сигнал
Л

 инейно
– изменяющийся вх. сигнал
инейно
– изменяющийся вх. сигнал
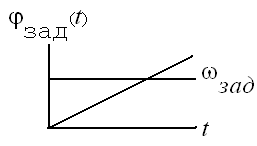
Отработка линейно – нарастающего воздействия характеризуется ошибкой, зависящей от скорости изменения входного сигнала, потому точность СЭП с астатизмом 1-го порядка принято оценивать не по величине ошибки, а по значению добротности.
 Теоретически
значение добротности определяется по
выражению:
Теоретически
значение добротности определяется по
выражению:

Фактически добротность по скорости является коэффициентом пропорциональности между скоростью изменения управляющего воздействия и ошибкой ОС.
Ч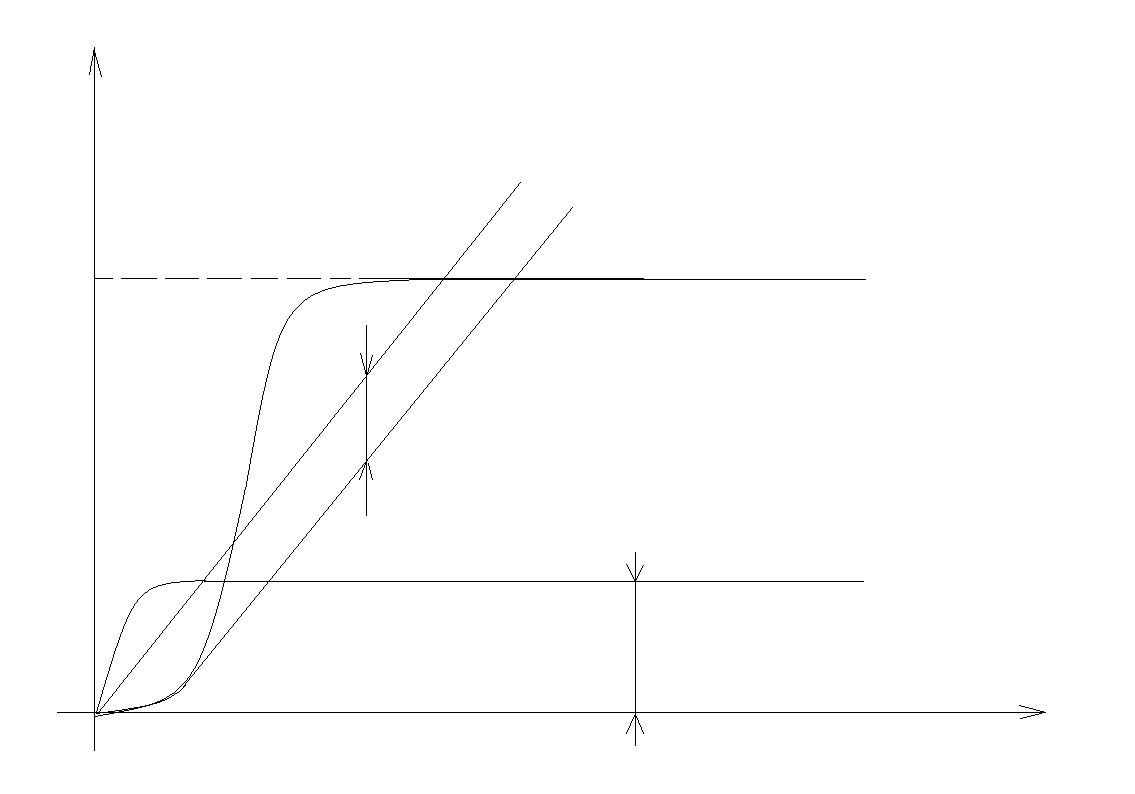 исленно
добротность равна скорости изменения
входного воздействия дающей единичное
изменение ошибки.В
исленно
добротность равна скорости изменения
входного воздействия дающей единичное
изменение ошибки.В
 тиристорных ЭП постоянного тока
добротность по скорости в среднем
соответствует 20..40 с-1
тиристорных ЭП постоянного тока
добротность по скорости в среднем
соответствует 20..40 с-1






25. Ошибки следящей системы при отработке управляющего воздействия. Оценка точности при воздействиях, меняющихся с постоянной производной. Понятия добротности по скорости и ускорению

1.Настройка
 на
МО
на
МО


Ступенчатое
входное воздействие

Установившаяся
ошибка

Линейновозрастающие
воздействия

 ;
;
 ;
;


 -
Добротность.
-
Добротность.
Отработка контура линейного воздействия. Добротность. Методы определения.
При
настройки на МО характеризуется
установившейся ошибкой, величина которой
зависит от скорости изменения входного
воздействия, поэтому точность систем
астатизма 1-го порядка оценивают не по
величине ошибки, а по величине добротности
 .
Физическая добротность является
коэффициентом пропорциональности между
скоростью изменения управляющего
воздействия и ошибкой обратной связи
(при возмущен
.
Физическая добротность является
коэффициентом пропорциональности между
скоростью изменения управляющего
воздействия и ошибкой обратной связи
(при возмущен
 ).
).
Числено она равна скорости изменения входного воздействия дающей единичную ошибку обратной связи.
Существует несколько способов определения добротности:
1. Из лачх
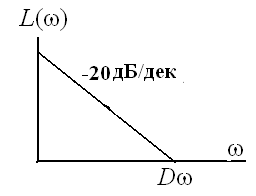
Добротность равна частоте среза
2. Экспериментально из полученных переходных характеристик
3.Аналитически. Расчет производиться по формуле:
