

Линеаризуем полученное уравнение
![]() –
–
![]() –
–
![]() .
.
Принимая,
что расход жидкости через гидравлическое
сопротивление (вентиль) определяется
уравнением Бернулли, запишем:
![]() .
.
При этом
 ,
,
где
индекс 0 соответствует установившемуся
режиму работы. С учетом полученного
результата запишем линеаризованное
уравнение в стандартной форме
![]() ,
где
,
где
 ;
;
 ;
;
![]()
Если
Н – выходная координата, а S
– входная, то
 ,
т.е. рассматриваемый объект описывается
инерционным звеном первого порядка.
,
т.е. рассматриваемый объект описывается
инерционным звеном первого порядка.
Инерционные звенья второго порядка. Инерционные звенья второго порядка есть звенья, описываемые передаточной функцией вида:
![]()
Если коэффициент демпфирования 0< <1, то звено – колебательное,
Если
![]() ,
то звено – апериодическое второго
порядка,
,
то звено – апериодическое второго
порядка,
Если =0, то звено – консервативное,
Указанной W(p) соответствует дифференциальное уравнение
![]()
Kорни характеристического уравнения
![]()
равны:

и определяют коэффициент затухания
![]()
и круговую частоту затухающих колебаний
![]() ,
рад/с.
,
рад/с.
Переходную функцию запишем в виде, удобном для дальнейшего использования
 .
.
Из
полученной формулы следует, что свободная
составляющая h(t) представляет собой
синусоиду, амплитуда которой убывает
по экспоненциальной огибающей. Чем
больше
и меньше
![]() ,
тем быстрее затухают колебания.
,
тем быстрее затухают колебания.
Переходную и весовую функции, как уже отмечалось, можно определить, используя таблицы обратных преобразований Лапласа. Комплексный коэффициент передачи равен
![]() .
.
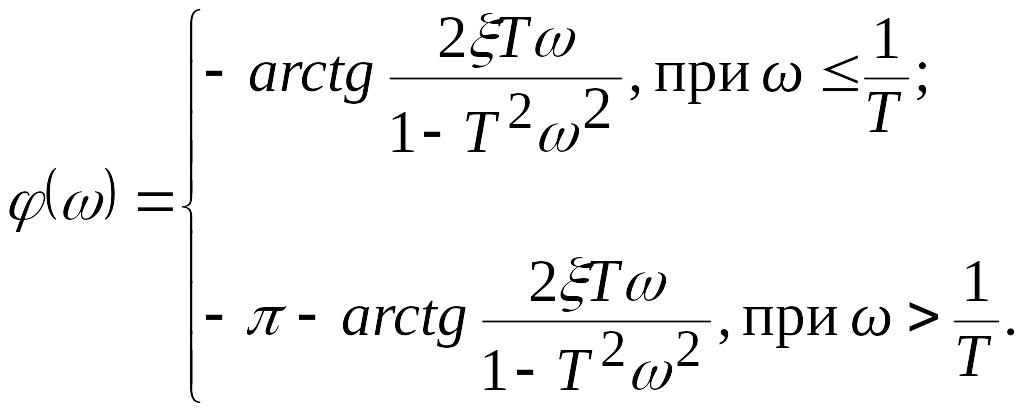
Фазовая
частотная функция изменяется монотонно
от 0 до
![]() и выражается формулой:
и выражается формулой:
Амплитудно–частотная функция
имеет максимум (резонансный пик), если <0,707.
Из графика (рис. 2.8) видно, что колебательное звено, как и другие инерционные звенья, хорошо пропускают сигналы низкой частоты, и плохо – высокой.
ЛАЧХ колебательного звена
![]()
удовлетворительно совпадает с асимптотической характеристикой
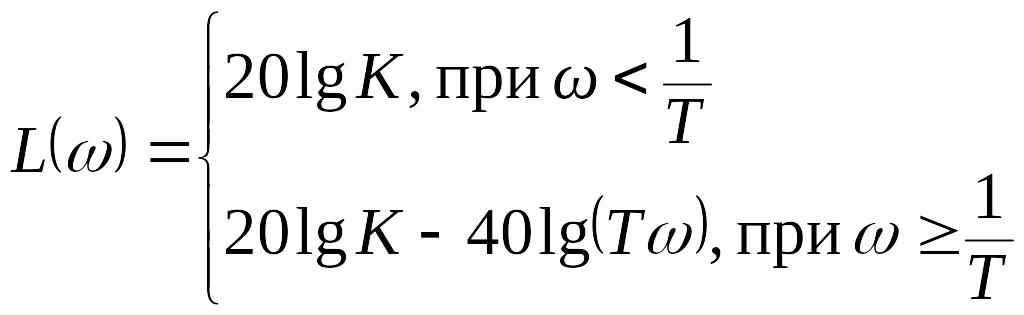 .
.
h

 h(t)
A
Amax
h(t)
A
Amax
![]()
K
A![]()
![]()
![]() K
K
0
t
![]()

 L
W
W(t)
L
W
W(t)
20lgK
L(![]() -40
-40![]() /дек
/дек
0 t
![]()
 jV
jV
![]()
K U 0
-90
![]()
![]() -180
-180
Рис.2.8 Характеристики колебательного звена
при
![]() .
Если
.
Если
![]() ,
то необходимо учитывать отклонение
точной ЛАЧХ от асимптотической, примерно
равное
,
то необходимо учитывать отклонение
точной ЛАЧХ от асимптотической, примерно
равное
![]() при
при
![]() .
Позволяет получить более точные
результаты применение специальных
шаблонов.
.
Позволяет получить более точные
результаты применение специальных
шаблонов.
Консервативное
звено (
=0)
технически
равносильно идеальному колебательному
контуру. Апериодическое звено второго
порядка (
![]() 1)
можно, как отмечалось выше, представить
в виде последовательного соединения
двух апериодических звеньев первого
порядка:
1)
можно, как отмечалось выше, представить
в виде последовательного соединения
двух апериодических звеньев первого
порядка:
![]() ,
,
где
 .
.
Переходная функция звена второго порядка имеет вид:
 ,
если
,
если
![]() .
.
Если
![]() ,
то общее решение однородного
дифференциального уравнения имеет вид
,
то общее решение однородного
дифференциального уравнения имеет вид
![]() и, соответственно,
и, соответственно,
 .
.
Общий вид характеристик апериодического звена второго порядка приведен на рис. 2.9. Инерционными звеньями второго порядка обычно описываются объекты, содержащие два накопителя, связанные каналом передачи энергии или вещества. Коэффициент демпфирования служит мерой потери энергии в канале передачи энергии (вещества).
Примером
инерционного звена второго порядка,
служит четырехполюсник, состоящий из
резистора
![]() ,
индуктивности
,
и конденсатора емкостью
,
индуктивности
,
и конденсатора емкостью
![]() .
(рис.2.10).
.
(рис.2.10).
Передаточная функция четырехполюсника
 ,
,
Где
![]() ;
;
![]() .
.
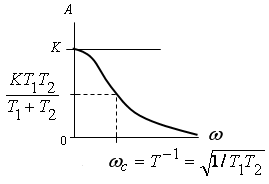
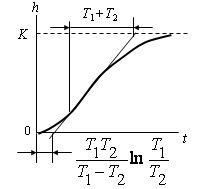
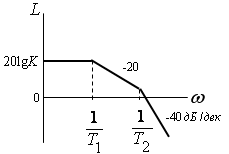
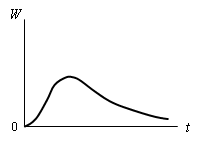
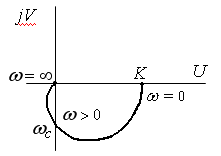
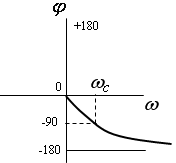
Рис.2.9 Характеристики апериодического звена 2-го порядка
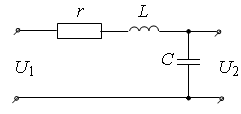
Рис.2.10 Четырехполюсник
Регулируя рассеяние энергии изменением сопротивления , можно добиться апериодического или колебательного переходного процесса.
Инерционным звеном второго порядка удовлетворительно описываются и процессы в электрических двигателях постоянного тока. Накопителем электромагнитной энергии при этом является индуктивность якорной цепи, а кинетической – вращающаяся масса. Потери энергии происходят в основном в активном сопротивлении якорной цепи.
Пример
механической системы, которую
приблизительно можно описать инерционным
звеном второго порядка, показан на
рис.2.11. Груз 2 массой
![]() ,
подвешенный на пружине 1, жестко соединен
со штоком демпфера 3. Полости цилиндра
демпфера 3 заполнены жидкостью и соединены
жиклером 4. Полагая, что усилие, развиваемое
пружиной, пропорционально ее деформации
,
а сила сопротивления демпфера
пропорциональна скорости перемещения
поршня относительно цилиндра, динамику
рассматриваемой системы можно описать
следующим уравнением:
,
подвешенный на пружине 1, жестко соединен
со штоком демпфера 3. Полости цилиндра
демпфера 3 заполнены жидкостью и соединены
жиклером 4. Полагая, что усилие, развиваемое
пружиной, пропорционально ее деформации
,
а сила сопротивления демпфера
пропорциональна скорости перемещения
поршня относительно цилиндра, динамику
рассматриваемой системы можно описать
следующим уравнением:
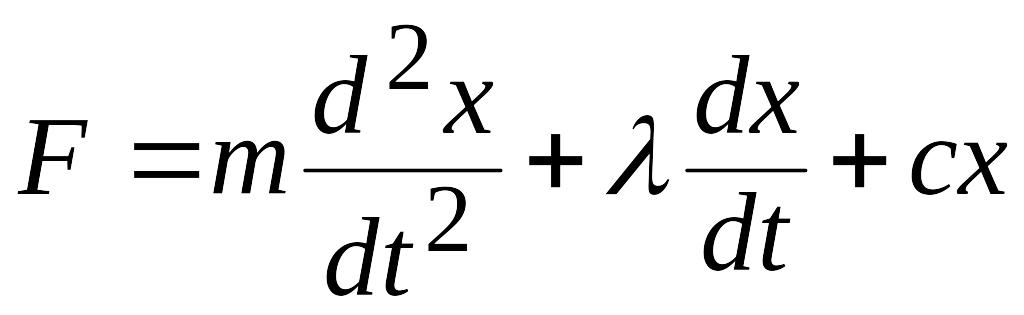 ,
,
где
![]() – коэффициент сопротивления демпфера,
– коэффициент сопротивления демпфера,
![]()
 – коэффициент
жесткости пружины
– коэффициент
жесткости пружины
1
F 2
3
4
Рис.2.11
Принимая, что – выходная координата, а действующая сила F – входная, получим следующую передаточную функцию:
Обозначаем
![]() ;
;
![]() ;
;![]() ,
,
окончательно получим
 .
.
Отметим общие свойства позиционных (статических) звеньев:
В установившемся режиме выходная величина y связана с входной х уравнением статики
 ,
причем передаточный коэффициент k можно
определить из W(p) звена, полагая p=0.
,
причем передаточный коэффициент k можно
определить из W(p) звена, полагая p=0.
Звенья первого и второго порядков являются фильтрами низких частот и в режиме гармонических колебаний создают отрицательные фазовые сдвиги.
Интегрирующие звенья. Интегрирующие свойства присущи всем объектам, в которых происходит накопление вещества или энергии без потери в окружающую среду. Передаточной функции идеального интегрирующего звена
![]()
соответствует дифференциальное уравнение
![]()
Интегрируя
уравнение при
![]() и нулевых начальных условиях, получим:
и нулевых начальных условиях, получим:
![]()
Переходная характеристика представляет собой прямую, проходящую через начало координат, с угловым коэффициентом наклона, равным .
Импульсная переходная функция звена равна
![]()
Амплитудно–фазовая характеристика
![]()
совпадает с отрицательной мнимой полуосью.
Амплитудно-частотная
характеристика представляет гиперболу,
которая при
![]() стремится к бесконечности:
стремится к бесконечности:
![]() .
.
Фазо–частотная
характеристика
![]() ,
т.е. сдвиг фаз, создаваемый звеном, на
всех частотах одинаков, и равен –90°.
,
т.е. сдвиг фаз, создаваемый звеном, на
всех частотах одинаков, и равен –90°.
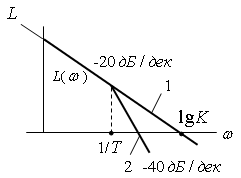
ЛАЧХ:
![]() .
.
Это
уравнение прямой, проходящей через
точку с координатами
![]() и
и
![]() ,
и имеющей наклон –20
,
и имеющей наклон –20
![]() .
(минус двадцать децибел на декаду). ЛАЧХ
пересекает ось абсцисс при
.
(минус двадцать децибел на декаду). ЛАЧХ
пересекает ось абсцисс при
![]() ,
т.к.
,
т.к.
![]() .
Эту частоту называют частотой среза.
.
Эту частоту называют частотой среза.
Реальное интегрирующее звено
![]()
описывается дифференциальным уравнением вида
![]() ,
,
которому соответствует следующая переходная функция:
 .
.
Реальное интегрирующее звено не является элементарным, поэтому его частотные характеристики могут быть получены по характеристикам идеального интегрирующего звена и апериодического звена первого порядка. Характеристики интегрирующих звеньев показаны на рис.2.12.
Простейшим примером интегрирующего звена является резервуар, в который подается жидкость q (м3/с). Действительно, уравнению баланса жидкости
![]() ,
,
где F – площадь поверхности, м2; Н – уровень жидкости, м,


h 1 A
h(t) A( )
2
2
1
0 t 0
T
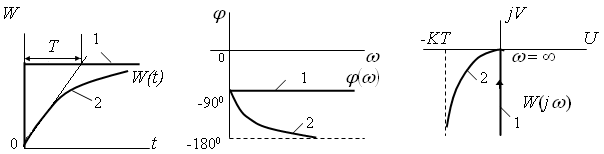
Рис.2.12 Характеристики идеального (1) и реального (2)
интегрирующих звеньев
соответствует передаточная функция
![]() ,
,
где
![]()
Гидравлический исполнительный механизм, для которого входной величиной является расход жидкости q (м3/с), поступающей в полость цилиндра, и выходной – перемещение х (м) поршня, удовлетворительно описывается идеальным интегрирующим звеном.
Электрический
двигатель, например, двухфазный
асинхронный, используемый для управления
инерционным объектом, можно считать
идеальным интегрирующим звеном, если
выходной координатой служит угол
поворота вала, а входной – напряжение,
приложенное к обмотке управления Uy.
Если учесть инерцию вращающихся частей
J (![]() ),
то характеристики двигателя при
постоянном напряжении в обмотке
возбуждения будут соответствовать
реальному интегрирующему звену, с
постоянной времени
),
то характеристики двигателя при
постоянном напряжении в обмотке
возбуждения будут соответствовать
реальному интегрирующему звену, с
постоянной времени
 ,
,
где MВ
– номинальное
значение пускового момента,
![]() ;
;
nВ
– номинальная частота вращения,
![]() .
.
Коэффициент
передачи двигателя
![]() приблизительно равен
приблизительно равен
 ,
,
где
![]() – номинальное значение управляющего
воздействия, В.
– номинальное значение управляющего
воздействия, В.
Отметим общие свойства интегрирующих звеньев:
Интегрирующие звенья сохраняют значение выходного сигнала после отключения входного сигнала, поэтому могут использоваться в качестве запоминающих элементов.
Наличие в передаточной функции любого интегрирующего звена сомножителя 1/р приводит при постоянном входном воздействии к неограниченному росту выходной величины. После окончания переходного процесса этот рост идет по линейному закону.
Интегрирующие звенья создают отрицательный фазовый сдвиг и являются фильтрами низкой частоты.
Дифференцирующие звенья. Идеальное дифференцирующее звено описывается передаточной функцией
![]()
и, соответственно, уравнением вида
![]()
Частотные и временные функции имеют следующий вид:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Из этих формул, в частности, следует, что амплитуда выходного гармонического сигнала растет пропорционально частоте, поэтому дифференцирующие звенья являются фильтрами высокой частоты и вносят положительный фазовый сдвиг.
При подаче на вход дифференцирующего звена ступенчатого воздействия на выходе возникает кратковременный импульс, по окончании которого выходной сигнал становится равен нулю.
ЛАЧХ
идеального дифференцирующего звена
есть прямая, проходящая через точку с
координатами
![]() и
и
![]() ,
и имеющая наклон 20
(плюс двадцать децибел на декаду), т.е.
,
и имеющая наклон 20
(плюс двадцать децибел на декаду), т.е.
![]() увеличивается на 20
при возрастании частоты на одну декаду.
ЛАЧХ пересекает ось абсцисс при частоте
среза
увеличивается на 20
при возрастании частоты на одну декаду.
ЛАЧХ пересекает ось абсцисс при частоте
среза
![]() .
.
Идеальным интегрирующим звеном можно описать безынерционный редуктор, если входной координатой является угол ведущего вала, а выходной – частота вращения ведомого вала.
Большинство технических устройств (элементов), обладающих способностью дифференцировать входной сигнал, удовлетворительно описываются передаточной функцией реального дифференцирующего звена:
![]() ,
,
которому соответствуют дифференциальное уравнение
![]()
и переходная функция вида
![]() .
.
Реальное дифференцирующее звено не является элементарным, и его частотные характеристики могут быть получены по соответствующим характеристикам идеального дифференцирующего звена и апериодического звена первого порядка.
Характеристики дифференцирующих звеньев приведены на рис. 2.13.
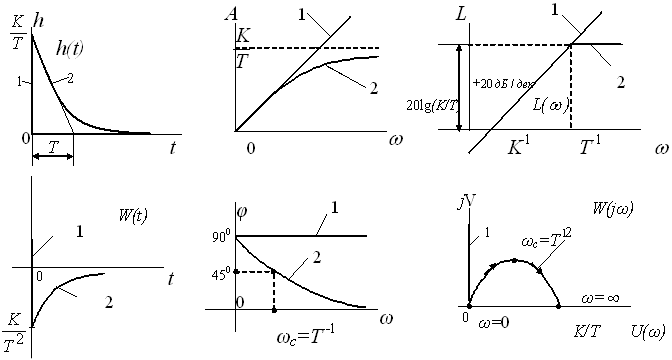
Рис.2.13 Характеристики идеального (1) и реального (2)
дифференцирующих звеньев
Реальными дифференцирующими звеньями описываются, в частности, электрические цепи, показанные на рис.2.14.
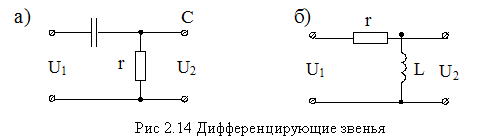
Передаточная функция для схемы, показанной на рис 2.14 а:
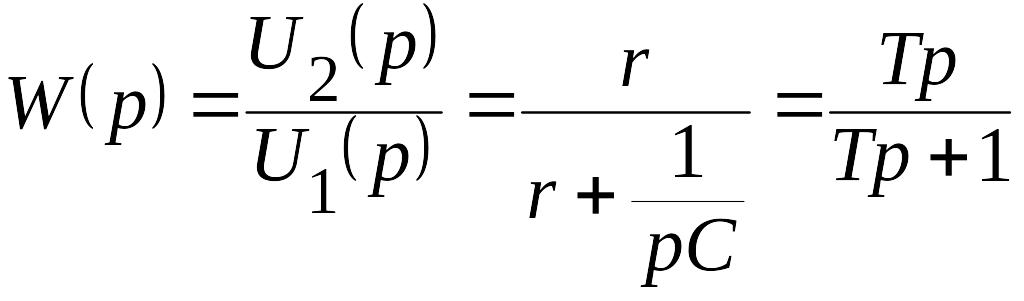 ,
где
,
где
![]() ,
с.
,
с.
Соответственно, для схемы 2.14 б.
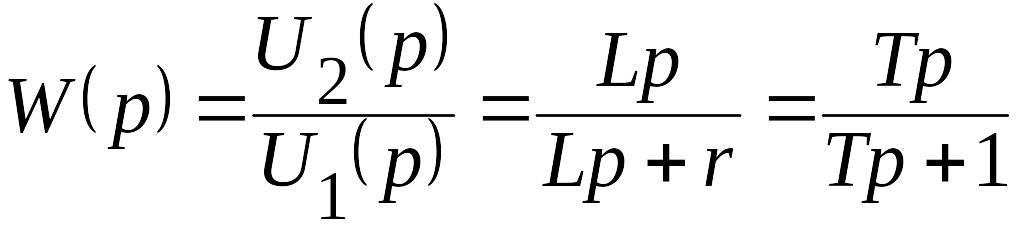 ,
где
,
с.
,
где
,
с.
Важнейшие свойства, отмеченные выше для идеального дифференцирующего звена, в основном характерны и для реального дифференцирующего звена.
Звено запаздывания. Звено запаздывания используется для математического описания элементов, которые передают сигнал без искажений его формы, но с некоторым отставанием (запаздыванием). К таким элементам в первую очередь относятся транспортирующие устройства (конвейеры, трубопроводы) и аппараты, обладающие большими размерами и распределенными в пространстве массообменными процессами (сушильные барабаны). Уравнение звена запаздывания относится к классу уравнений с запаздывающим аргументом:
![]() ,
,
где
![]() – длительность запаздывания.
– длительность запаздывания.
Полагая
![]() ,
получаем переходную функцию:
,
получаем переходную функцию:
![]() ,
,
а
при
![]() – функцию веса:
– функцию веса:
![]() .
.
Преобразуя по Лапласу уравнение звена
![]() ,
,
находим передаточную функцию:
![]() .
.
Амплитудно–фазовая характеристика представляет окружность единичного радиуса
![]() ,
,
так как амплитудно–частотная функция
![]() ,
,
а
фазочастотная
![]() .
.
Для
упрощения анализа и синтеза систем, в
состав которых входят звенья запаздывания,
![]() аппроксимируют разложением в ряд
Тейлора:
аппроксимируют разложением в ряд
Тейлора:
![]()
или
в ряд Паде
 ,
,
ограничиваясь двумя или тремя (как показано в приведенных зависимостях) членами ряда.
Звено
запаздывания
![]() ,
исходя из
определения показательной функции
,
исходя из
определения показательной функции
 ,
,
можно
аппроксимировать совокупностью n
апериодических звеньев первого порядка
 .
.
Звено запаздывания широко используется при составлении приближенных моделей динамики инерционных объектов.
Заключение. Несмотря на большое техническое и функциональное разнообразие элементов автоматических систем, их динамические свойства можно разделить на несколько групп – типовых звеньев. Звенья являются своеобразными «кирпичиками», из которых строятся здания динамики автоматических систем. Каждое из звеньев можно описать совокупностью характеристик, включая дифференциальное (алгебраическое) уравнение, передаточную функцию, частотные и временные характеристики.
Типовые звенья относятся к математическим идеализациям, широко используемым для моделирования средств автоматики.
Обобщая изложенный материал по типовым звеньям, следует отметить:
1. Безынерционное звено и звено запаздывания передают входные сигналы без искажений формы, но первое из них передает сигнал на выход мгновенно, а второе – с запаздыванием.
2. Инерционное и интегрирующее звенья являются фильтрами низкой частоты и вносят отрицательный фазовый сдвиг, а дифференцирующие являются фильтрами высокой частоты и вносят положительный фазовый сдвиг.
3. При подаче единичного ступенчатого сигнала на вход позиционных звеньев выходной сигнал стремится к значению, определяемому коэффициентом передачи. Если единичный ступенчатый сигнал подается на интегрирующее звено, то выходной сигнал неограниченно растет. Дифференцирующее звено не передает постоянные входные сигналы.