

§1.1 Принципы управления
Основные операции процесса управления. В ТУ рассматриваются не физические и конструктивные особенности элементов и систем управления, а информационные процессы, протекающие в них. Информационный подход позволяет применять единые принципы для построения и исследования САУ объектами различной физической природы и разнообразного технического исполнения.
Под управлением понимается совокупность операций по организации рассматриваемого процесса для достижения определенных целей.
Чтобы уяснить процесс управления, рассмотрим управление автомобилем или другим транспортным средством. В процессе управления можно выделить четыре операции.
Первая – получение информации о маршруте движения, т.е. цели управления.
Вторая – получение информации о положении автомобиля и окружающей ситуации, т.е. о результатах управления.
Третья – анализ полученной информации и принятие решения о требуемых управляющих действиях.
Четвертая – исполнение принятого решения, что достигается, в частности, поворотом руля.
Первые две операции отражают информационный аспект, третья – алгоритмический, четвертая – энергетический аспекты управления.
Если все четыре операции процесса управления осуществляются автоматически, то совокупность взаимодействующих между собой ОУ и АР следует рассматривать как САУ.
Информация и управление. Управление невозможно без достаточной информации о цели управления, воздействиях среды, состоянии и характеристиках ОУ.
Разработка САУ обычно включает в себя получение формализованного (математического) описания ОУ и наиболее значимых внешних воздействий. При изложении принципов автоматизации можно ограничиться представлением ОУ в виде обобщенной параметрической схемы (рис.1.1), изображенной в виде прямоугольника с входными и выходными y переменными (координатами). В число входных переменных относят управляющее воздействие u, контролируемое g и неконтролируемое f возмущения. В общем случае все переменные являются векторными функциями времени t. Вектор переменных состояния обозначен x.
 g
f
g
f
u ОУ y
x
Рис.1.1 Обобщенная параметрическая схема ОУ
В зависимости от используемой информации об ОУ, получаемой в процессе его функционирования, и внешних воздействий различают принципы детерминированного управления, компенсации, обратной связи и адаптации. В детерминированных системах текущая информация не используется; в системах компенсации используется текущая информация о возмущениях, действующих на объект; в системах с обратной связью – информация о выходных переменных. Если для управления используется одновременно текущая информация о выходной координате и возмущениях, то имеет место система комбинированного регулирования. Системы, построенные по принципу детерминированного управления, компенсации и обратной связи, относят к системам с фиксированной структурой и параметрами УУ. Такие системы называются системами с жесткой настройкой. Задача регулирования заключается в обеспечении ковариантности выходной переменной y с задающим воздействием v и инвариантности у по отношению к внешним (координатным) f и g и параметрическим возмущениям, обусловленным нестабильностью свойств элементов системы или связей между ними. Адаптивные системы характеризуются более полным использованием текущей информации об ОУ и внешней среде. Параметры и структура УУ в адаптивных системах изменяются при изменениях ОУ или внешней среды.
Принцип детерминированного управления. Функциональная схема системы детерминированного управления (рис. 1.2) имеет вид цепочки, в которой воздействие (информация) передается в одном направлении – от входного элемента – задатчика (З), формирующего задание на управление, через различные промежуточные преобразователи (ПП), включая усилители (У) (на рис. не показаны), исполнительное устройство (ИУ) к ОУ. В совокупности ПП, ИУ и З образуют управляющее устройство (УУ), которое оказывает на ОУ воздействия, определяемые его алгоритмом функционирования.
 f
g
f
g
v u
Рис.1.2 Функциональная схема детерминированной системы управления
На практике применяется широкая номенклатура З, ПП, ИУ, различающихся принципом действия, конструктивным исполнением и другими признаками. В электрических устройствах роль ИУ часто выполняет управляемый усилитель, а роль задатчика – потенциометр. В технологических аппаратах ИУ обычно состоит из регулирующего органа (РО), например, клапана, задвижки и т.п. с электрическим, пневматическим или гидравлическим приводом – исполнительным механизмом (ИМ).
Указанный принцип применим, если свойства ОУ известны и неизменны, а возмущения отсутствуют. Отсутствие контрольной информации об ОУ ограничивает применение детерминированных систем и приводит к необходимости вмешательства оператора в управление при любых изменениях технологического процесса.
Принцип компенсации. Цель компенсации – исключить влияние возмущений на точность воспроизведения задающего сигнала. Регулирование по принципу компенсации называют также регулированием по возмущению.
Для определения (расчета) компенсирующего воздействия необходимо измерить возмущение и иметь математическое описание (математическую модель – ММ), количественно связывающее отклонение (реакцию) выходной переменной ОУ с изменениями возмущающего и управляющего воздействий.
Наличие текущей информации о причине нежелательного отклонения выходной координаты делает возможным создание второго канала воздействия на ОУ, по результатам измерения возмущения g. Такой подход к управлению называют принципом двухканальности. Компенсирующее воздействие формируется динамическим компенсатором К и АР так, чтобы обеспечить независимость (инвариантность) выходной координаты от контролируемого возмущения: эта задача может быть решена, если известны характеристики (математическая модель) ОУ по каналам U и g. Обобщенная функциональная схема системы компенсации, состоящая из двух подсистем ОУ и АР, показана на рис.1.3

Рис. 1.3 Обобщенная функциональная схема
системы компенсации
Рассмотренные на рис. 1.2 и 1.3 системы являются разомкнутыми. Это означает, что при конструировании регулятора регулирующее воздействие по каналу задания определяется по априорно известным свойствам объекта. В системах компенсации управляемая координата не измеряется и управляющее воздействие не зависит от нее. Отсутствие исчерпывающей и достоверной информации о свойствах ОУ и возмущений ограничивает область применения разомкнутых систем управления. С увеличением числа измеряемых возмущений, существенно влияющих на поведение ОУ, возрастает сложность технической реализации систем компенсации. САУ, построенные по принципу компенсации, могут самостоятельно использоваться для управления только устойчивыми объектами, т.е. объектами которые не накапливают возможные отклонения, а после окончания возмущения самостоятельно возвращаются в исходное состояние. Такие объекты называют объектами с самовыравниванием. К ним относятся, например, печи и другие тепловые объекты. Объекты без самовыравнивания накапливают (интегрируют) действия возмущений, поэтому не могут возвращаться в исходное состояние после их исчезновения. Примером может служить сосуд, из которого поступающая жидкость откачивается насосом постоянной производительности, если в качестве возмущения рассматривать возможные колебания поступающего расхода.
Система компенсации обладает высоким быстродействием благодаря тому, что АР вступает в действие, не дожидаясь момента, пока возмущение приведет к заметному изменению регулируемой величины. Возможность упредить влияние возмущения на регулируемый параметр (организовать управление «вперед») делает принцип компенсации перспективным для создания современных САУ.
Наряду с координатными (сигнальными) возмущениями, т.е. энергетическими или массовыми воздействиями внешней среды на ОУ, могут иметь место параметрические возмущения, обусловленные зависимостью свойств элементов системы от времени, режима работы или окружающей среды. Если причины изменения характеристик объекта контролируются, то текущая информация может использоваться для корректирования параметров настройки, изменения структуры или алгоритма работы УУ.
Принцип обратной связи. Обратной связью называется передача информации о выходной переменной системы на ее вход. Суть этого принципа заключается в измерении отклонения y от регламентированного значения v и использовании этого отклонения е=v–y для управления объектом.(рис. 1.4б)
Н![]() а
схеме элемент сравнения, формирующий
сигнал рассогласования, условно выделен
из состава АР и обозначен
а
схеме элемент сравнения, формирующий
сигнал рассогласования, условно выделен
из состава АР и обозначен
![]() . В данном случае обратная связь – это
цепь передачи информации об управляемой
переменной на вход АР. Системы с обратной
связью являются замкнутыми: информация
с выхода ОУ поступает на вход АР, а с
выхода АР – на вход ОУ. Использование
обратной связи позволяет уменьшить
влияние на цель управления как
координатных, так и параметрических
возмущений вне зависимости от их числа
и доступности измерений. Этот принцип
не предъявляет жестких требований к
наличию ММ объекта.
. В данном случае обратная связь – это
цепь передачи информации об управляемой
переменной на вход АР. Системы с обратной
связью являются замкнутыми: информация
с выхода ОУ поступает на вход АР, а с
выхода АР – на вход ОУ. Использование
обратной связи позволяет уменьшить
влияние на цель управления как
координатных, так и параметрических
возмущений вне зависимости от их числа
и доступности измерений. Этот принцип
не предъявляет жестких требований к
наличию ММ объекта.
а
Ручное управление

v ИУ y
 g
f
g
f
б) v y
Рис.1.4 Функциональные схемы систем управления с обратной связью:
а – развернутая; б – обобщенная
Простота реализации и универсальность принципа обратной связи обеспечивают широкое применение замкнутых систем.
Управление с обратной связью часто называют управлением по отклонению. Отклонение управляемой координаты связано с изменением количества энергии или вещества, содержащегося в ОУ, поэтому системы с обратной связью, как правило, уступают по быстродействию системам компенсации. Замкнутые системы склонны к колебаниям, что обусловлено передачей сигнала с выхода системы на вход и должно учитываться при проектировании и наладке.
На примере системы с обратной связью рассмотрим более подробно функциональный состав САУ (рис.1.4а). С помощью задатчика З формируется задающий сигнал v (уставка), пропорциональный заданному значению y. Фактическое значение y измеряется при помощи измерительного преобразователя (датчика) ИП. Для формирования управляющего воздействия в систему вводят корректирующее (регулирующее) устройство РУ, которое совместно с ИУ осуществляет преобразование сигнала рассогласования в управляющее воздействие. Функция РУ может, например, заключаться в формировании таких воздействий, которые в течении минимального времени обеспечат с необходимой точностью приведение управляемой координаты к заданному значению независимо от характера и места приложения возмущения.
Если мощность выходного сигнала РУ недостаточна для управления ИМ, то в систему вводят дополнительный усилитель (на схеме не показан), который воспроизводит поступающий на его вход сигнал с увеличением мощности за счет энергии вспомогательного источника. Функции нескольких преобразователей (элементов) может выполнять одно техническое устройство.
Для осуществления текущего контроля за ходом технологического процесса (см.рис.1.4а) используют устройство отображения информации (УОИ), например, дисплей или совокупность показывающих, сигнализирующих и регистрирующих приборов. ИУ снабжают органами ручного управления, которыми пользуются при отказах элемента сравнения и РУ или для вывода ОУ на расчетный режим и при пуске системы. Задающее воздействие при решении задач управления генерируется блоком управления (БУ), не входящим в замкнутый контур (на рис.1.4б показан пунктиром), или определяется подсистемами вышестоящих уровней управления.
Принцип комбинированного управления. Недостатки, присущие системам с обратной связью, несвойственны системам компенсации. Это делает целесообразным применение систем комбинированного управления, в которых одновременно используются принципы регулирования по отклонению и возмущению. В системах комбинированного управления сочетаются достоинства, присущие обоим принципам управления: повышение инвариантности (независимости) управляемой координаты относительно основных возмущений достигается использованием управления по возмущению, а снижение чувствительности к изменениям свойств объекта и остальным возмущениям обеспечивается применением обратной связи по выходной координате.
К основным возмущениям обычно относят нагрузку на ОУ, например, момент сопротивления на валу электродвигателя.
Принцип адаптации. Адаптация (приспособление) САУ к изменяющимся характеристикам ОУ может быть непрерывной или периодической, выполняться вручную, автоматизированно или автоматически.
Ручная адаптация – это настройка регуляторов, осуществляемая наладчиком без использования специализированного аппаратурного и алгоритмического обеспечения. Настройка заключается в уточнении алгоритмов управления по результатам функционирования системы и обычно проводится в процессе эксплуатации САР. Необходимость настройки системы обусловлена недостаточностью и неточностью информации о свойствах объекта, изменением его свойств в ходе эксплуатации, а также особенностями стыковки регулятора с объектом (люфты в механических сочленениях, выбеги ИМ и т.п.). Свойства ОУ, подготовленного к автоматизации, как правило, изменяются относительно медленно, поэтому регуляторы подстраивают не постоянно, а периодически. Для этого могут использоваться системы автоматизированной адаптации, в которых наладчик применяет организационно, технически и алгоритмически оформленные способы настройки САУ.
Системы, которые нуждаются периодически в ручной или автоматизированной корректировке алгоритма работы, являются системами с жесткой настройкой.
САУ с устройствами адаптации, выполняющими свои функции автоматически, без наладчика, называются адаптивными системами. Адаптивную систему можно определить как систему, которая в условиях непредвиденного изменения свойств объекта, внешней среды или цели управления самостоятельно корректирует структуру, алгоритм работы или параметры системы, обеспечивая необходимое качество управления.
Адаптивные системы, у которых целенаправленно изменяются параметры управляющего устройства, называют самонастраивающимися, параметры и структура – самоорганизующимися, параметры, структура и алгоритм управления – самообучающимися. Самонастраивающиеся системы включают в себя, в частности системы экстремального управления, которые позволяют оптимизировать показатели, характеризующие квазистационарный режим работы ОУ.
Реализация адаптивных технических решений является одним из перспективных направлений компенсации неопределенности функционирования объекта управления и системы в целом.
Фактор неопределенности может иметь различную природу. Источником неопределенности являются нестационарность и нелинейность характеристик процесса, неадекватность математического описания, сложность принятия решений в условиях многофакторных возмущений и другие причины. Нестабильность технологических процессов может быть обусловлена колебаниями свойств сырья, изменениями параметров внешней среды, потоков вещества и энергии, влиянием неучтенных факторов.
Следует подчеркнуть, что применение принципа адаптации не единственный подход к преодолению неопределенности. Достаточно вспомнить, что введение обратных связей призвано решать вопросы об изменении управляющих воздействий в зависимости от текущего хода технологического процесса. Однако при изменении параметров объекта или внешних воздействий в широком диапазоне системы, работающие по отклонению, не обеспечивают требуемого качества управления, так как работают при постоянной структуре и параметрах настройки регулятора.
Адаптивные системы в отличии от систем с жесткой настройкой включают в себя подсистемы, позволяющие в ходе эксплуатации идентифицировать изменение свойств ОУ и использовать полученные результаты для совершенствования процесса управления. Отсутствие в системах компенсации параметрических возмущений подсистемы текущей идентификации свойств объекта не позволяет причислять их к адаптивным системам.
В адаптивных САУ используется иерархический принцип построения, в соответствии с которым система разделяется на ряд подсистем – уровней, находящихся между собой в функциональной взаимосвязи и подчиненности. Этот принцип выработан огромным опытом в разных областях, начиная от административного управления и кончая САУ, и позволяет, в частности, повысить эксплуатационную надежность систем.
Например, в самонастраивающейся системе подсистемой нижнего уровня может служить замкнутая САУ, образующая основной контур управления. Верхний уровень (контур адаптации) включает в себя идентификатор, оценивающий отклонения характеристик объекта на основе обработки данных о его входных и выходных координатах, и блок адаптации, в котором вычисляются новые значения параметров настройки регулятора.
В контуре адаптации реализуется отрицательная обратная связь, ослабляющая влияние параметрических возмущений на показатели качества САУ. Такую обратную связь иногда называют параметрической отрицательной обратной связью.
При выходе из строя элементов верхнего уровня основной контур сохраняет работоспособность. Целью адаптации может являться оптимальная настройка регулятора, связанная с поиском экстремума функционала, характеризующего качество работы системы.
Адаптивные системы отличаются от обычных систем более сложной структурой, наличием вычислительных, логических и запоминающих устройств. В то же время адаптивные системы способны наилучшим образом функционировать в условиях неполноты начальной информации о свойствах объекта или изменениях этих свойств непредвиденным образом. Все это в совокупности требует в каждом конкретном случае проведения детального технико-экономического обоснования целесообразности использования адаптивных систем.
Заключение. Рассмотренные фундаментальные принципы построения САУ, а именно, принцип компенсации и принцип обратной связи, позволяют сформулировать следующее определение: автоматическим регулированием называется поддержание постоянной или изменение по заданному закону некоторой величины, характеризующей объект, осуществляемое при помощи измерения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта. В начале курса понятие регулирование рассматривается как синоним понятия автоматическое управление.
Взаимосвязь механизированных систем (МС) с САР и САУ графически представлена на рис. 1.5.
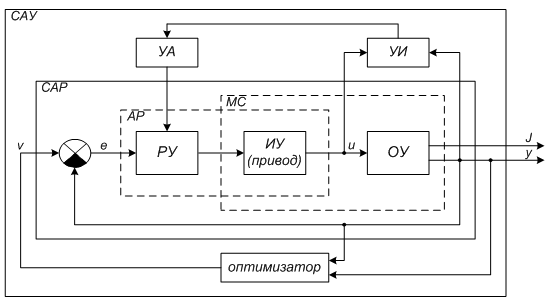
Рис. 1.5. Обобщённые функциональные схемы САУ, САР и МС
Механизация сводится к решению задач получения, преобразования, передачи и использования энергии. МС не вырабатывает управляющее воздействие U, а обрабатывает задание, определяемое человеком. Другими словами: МС не управляет объектом и парадигму управления не затрагивает. Создание МС – подготовительный этап автоматизации. САР является более совершённой системой по сравнению с МС, поскольку внутри неё вырабатывается управляющее воздействие объектом U, позволяющее автоматически обработать поданный на её вход внешний сигнал v, определяющий цель её работы. Сигнал v, т.е. управляющее воздействие для САР, определяет блок управления (рис. 1.4 б). В оптимальных САУ задание v вырабатывается таким образом, чтобы достичь наилучшего значения показателя качества J управления (рис. 1.5) определяющего, например, производительность объекта или затраты энергии на единицу выпускаемой продукции. В состав САУ вводится специальное программно-техническое устройство – оптимизатор, вычисляющий v по результатам измерений входных и выходных переменных ОУ. Дальнейшее совершенствование САУ достигается идентификацией, например, неизвестных характеристик объекта с помощью устройства идентификации (УИ) с последующим использованием устройства адаптации (УА) для изменения параметров настройки РУ.
Адаптивные системы более универсальны, чем неадаптивные. В адаптивных системах недостаток априорной информации восполняется за счет более полного по сравнению с неадаптивными системами использования текущей информации.