

Правила преобразования структурных схем
N п/п |
Операция |
Исходная схема |
Преобразованная схема |
1 |
2 |
3 |
4 |
x3
= x1
+ x2
x3
= x1
+ x2
1 |
Перемещение сумматора через узел ветвления по направлению сигнала |
|
|
x3
= x1
+ x2;
x1
= x3
- x2
x3
= x1
+ x2
2 |
Перемещение сумматора через узел ветвления противоположно направлению сигнала |
|
|
3
|
Перемещение звена через узел (сумматор) по направлению ветвления сигнала
|
x2
= Wx1
|
x2
= Wx1
|
x3
= W(x1
+ x2) |
x3
= Wx1
+ Wx2 |
||
x2
= Wx1
4
|
Перемещение звена через узел (сумматор) против направления ветвления сигнала
|
|
x2
= Wx1
|
х3=Wx1+x2 |
x3 |












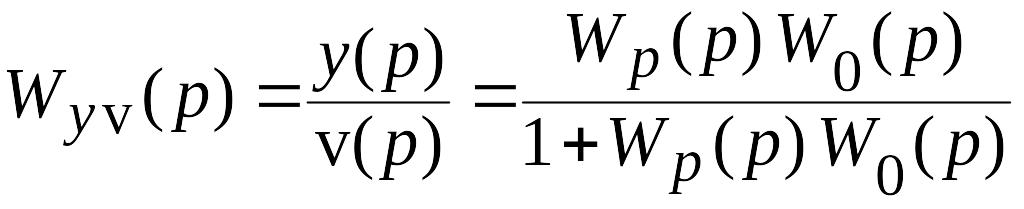
Передаточные
функции одноконтурной системы.
Запишем передаточные функции одноконтурной
системы с единичной обратной связью
(рис. 2.16,а), где
![]() ,
,
![]() соответственно передаточные функции
объекта и регулятора. Если исходная
система (рис.2.16,б) имеет неединичную
обратную связь, например, из-за наличия
датчика WД(р),
то ее можно преобразовать в схему с
единичной обратной связью, перенеся
WД(р)
через сумматор или узел ветвления.
соответственно передаточные функции
объекта и регулятора. Если исходная
система (рис.2.16,б) имеет неединичную
обратную связь, например, из-за наличия
датчика WД(р),
то ее можно преобразовать в схему с
единичной обратной связью, перенеся
WД(р)
через сумматор или узел ветвления.
а )
e
f
)
e
f
![]() y
y
б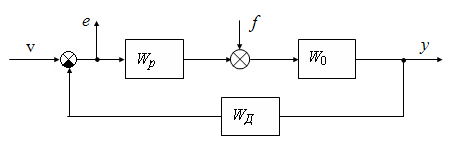 )
)
Рис.2.16 Схемы одноконтурной системы с единичной обратной связью (а)
и неединичной (б) обратной связью
Рассматриваемая схема (рис.2.16,а) полностью определяется следующей совокупностью передаточных функций:
 ;
;
 ;
;
 ;
;
 .
.
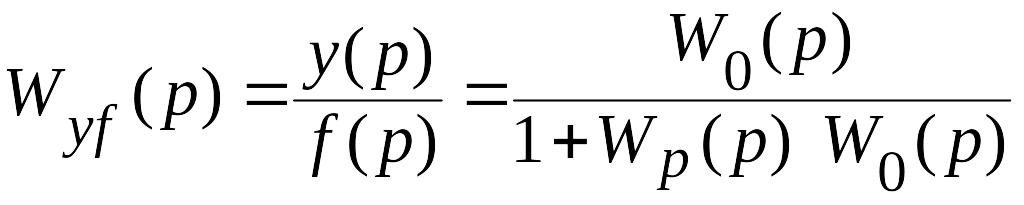
Передаточные функции системы по задающему воздействию (каналу воспроизведения) Wyv(р) и возмущающему воздействию (каналу подавления возмущений) Wyf(р) позволяют, используя принцип суперпозиции, составить изображение по Лапласу уравнения динамики системы
![]()
Передаточные функции составляющих сигнала ошибки по задающему воздействию Wev(p) и по возмущающему воздействию Wef(p) позволяют получить изображение по Лапласу уравнения динамики системы для сигнала ошибки:
е(р)=еv (р)+еf (p)=Wev (p)v(p)+Wef (p)f(p),
где еv(p) и еf(p) – изображения составляющих сигнала ошибки, обусловленные изменениями соответственно задающего и возмущающего воздействий.
Исходя из определения передаточной функции и формального совпадения при нулевых начальных условиях уравнений, преобразованных по Лапласу, с дифференциальными уравнениями в символической форме нетрудно перейти от полученных уравнений к дифференциальным уравнениям (см.§2.2).
Пример структурных преобразований САР. Структура исходной системы (рис. 2.17а) содержит главную обратную связь, передающую сигнал с выхода системы на её вход, и местную обратную связь. Если обратная или параллельная связи охватывают участок цепи, в который входит начало или конец другой обратной или параллельной связи, то говорят, что система имеет перекрещивающиеся связи. Структурные преобразования таких систем обязательно включают в себя операции освобождения от перекрещивающихся связей, что достигается переносом звеньев через сумматоры (узлы ветвлений) или узлов через сумматоры.
Перенеся
звено
![]() через сумматор
через сумматор
![]() ,
освободимся тем самым от перекрещивающихся
связей (рис.2.17,б). При переходе от схемы
(а) к схеме (б) использовалась очевидная
возможность объединения рядом стоящих
сумматоров и переноса сигнала, входящего
в один из сумматоров, во второй (от
перестановки слагаемых сумма не
изменяется). Затем, используя правила
определения эквивалентных передаточных
функций при параллельном соединении и
соединении звеньев с отрицательной
обратной связью
,
освободимся тем самым от перекрещивающихся
связей (рис.2.17,б). При переходе от схемы
(а) к схеме (б) использовалась очевидная
возможность объединения рядом стоящих
сумматоров и переноса сигнала, входящего
в один из сумматоров, во второй (от
перестановки слагаемых сумма не
изменяется). Затем, используя правила
определения эквивалентных передаточных
функций при параллельном соединении и
соединении звеньев с отрицательной
обратной связью
W5(p)=W1(p)+W3(p);
W6(p)=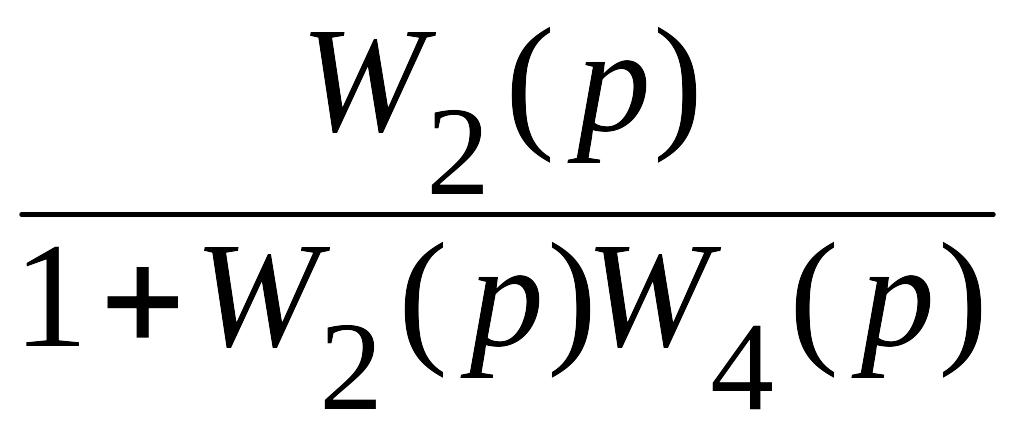 ,
,
получили типовую структуру САУ (рис.2.17,в).
а )
)
y1 f
v A e B C D y
y2 Местная О.С.
Главная О.С.
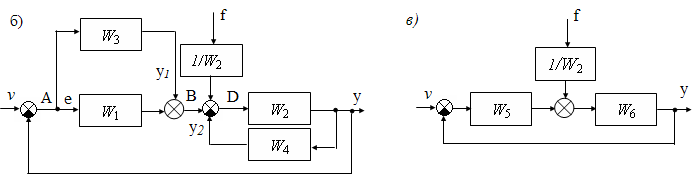
Рис.2.17 Структура исходной системы (а) и основные стадии
ее преобразования (б, в)
Заключение. Типовые соединения, являясь базой для структурных преобразований, одновременно позволяют доказать, что все типовые звенья могут быть сведены к различным соединениям двух простейших звеньев: пропорциональному и интегрирующему.
Одноконтурную систему достаточно полно характеризуют передаточные функции по каналам: задающее воздействие – выходная координата системы или сигнал рассогласования; возмущение – выходная координата системы или сигнал рассогласования. При составлении этих передаточных функций нужно помнить, что передаточные функции, стоящие вне замкнутого контура, не входят в передаточную функцию разомкнутого контура.
Рассмотренные правила позволяют практически любую многоконтурную схему свести к одноконтурной. Однако для сложных структур предпочтение часто отдают формуле Мезона, позволяющей вычислять передаточную функцию между двумя заданными узлами [1, 2, 10].