

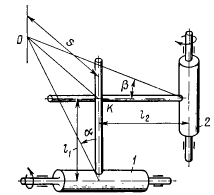
3.2.2. Поводковый механизм.
Поводковые механизмы относятся к пространственным механизмам. Их применяют в измерительных приборах для преобразования вращательного движения ведущего звена во вращательное движение ведомого звена. Последнее находится под определенным углом к ведущему звену. В поводковом механизме движение с ведущего вала 1 передается на ведомый вал 2 с помощью поводков 3 и 4, представляющих собой стержни одного диаметра, оси которых либо перпендикулярны к осям валов 1 и 2, либо одна из осей (чаще ось ведущего поводка) наклонена под углом.
Передаточное отношение не является величиной постоянной и зависит от угла поворота ведущего поводка , отношения длин поводков , угла наклона оси ведущего поводка .
3.2.3. Кривошипно – шатунный механизм.
Предназначен для преобразования вращательного движения в возвратно-поступательное и наоборот. На рис. показан аксиальный механизм.
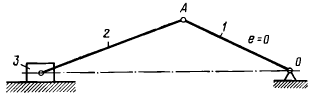
Рис.
1 – Кривошип; 2 – Шатун; 3 – Ползун.
Ведущим звеном может являться как кривошип, так и ползун. Передаточное отношение механизма непостоянно и зависит от отношения длин кривошипа и шатуна, а также угла поворота ведущего звена .
В приборах часто применяются дезаксиальные механизмы, в которых ось вращения кривошипа О смещена относительно оси ползуна на величину е, называемую дезаксиалом.
Рис.
Кривошипно-шатунные механизмы применяют в приборах, где чувствительными элементами являются манометрические трубки, мембраны и сильфоны.
Лекция № 4.
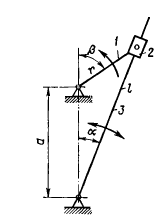
4.1. Кулисный механизм.
Кулисные механизмы применяют в приборах для передачи вращательного движения с одной оси на другую с преобразованием закона движения. Кулисный механизм состоит из кулисы 3 и кривошипа 1, несущего на конце ползун 2, который скользит в прорези кулисы.
Передаточное отношение в кулисном механизме можно считать постоянным при углах поворота рычага в пределах 45 град.
Кулисные механизмы также применяется в устройствах для получения прерывистого движения, работающих по заданной циклограмме, т. е. движения с периодическими остановами заданной продолжительности. В этом случае в приборах используют мальтийские и храповые механизмы.
Мальтийский крест.
На рис. показан мальтийский механизм, одним из элементов которой является мальтийский крест.
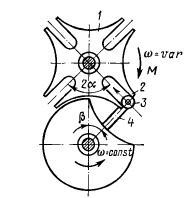
Лопасти 2 креста, имеющие пазы, представляют собой кулисы. Число лопастей не менее 3. Максимальное число пазов определяется габаритными размерами креста и механизма в целом равно 12. При вращении кривошипа 4 крест поворачивается только тогда, когда цевка 3 перемещается в пазу лопасти креста. Крест поворачивается на угол 2α при повороте кривошипа на угол 2β.
Храповые механизмы.
Их используют для преобразования колебательного движения ведущего звена во вращательное или поступательное движение ведомого звена с остановами. Храповые механизмы бывают с зубчатым и фрикционным зацеплением. На рис. показана конструкция храпового механизма, в котором колебательное движение сектора 3 с помощью двух рычагов- собачек 2 и 4 преобразуется в прерывистое вращательное движение храпового колеса 6. Ограничение перемещений собачек при повороте храпового колеса обеспечивается регулировочными винтами 1 и 5.
Фрикционные храповые механизмы применяют при средних и больших угловых скоростях ведущего звена, так как у них за счет скольжения смягчаются толчки при включении и выключении ведомого звена.
Рис.