

Лекция № 3. Механические механизмы.
3.1. Кулачковые механизмы.
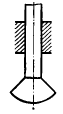
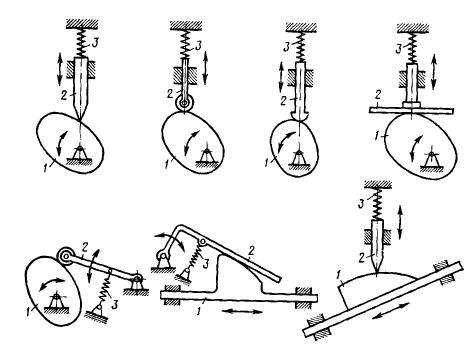
Кулачковые механизмы применяют для преобразования движения, как по видам, так и по функциональным зависимостям. Простейший кулачковый механизм представляют собой трехзвенный механизм, состоящий из ведущего звена - кулачка 1, ведомого звена - толкателя 2 и пружины 3. Виды преобразования движения определяются конструкцией кулачкового механизма: преобразование вращательного движения в колебательное (кулачковые с качающимся роликом) (рис. ); вращательного в поступательное (кулачковая с поступательно движущимся толкателем) (рис. ); поступательного в колебательное (рис. ); поступательного в поступательное. По виду движения ведущего звена кулачковые механизмы разделяют на две группы: с вращающимися кулачками и с поступательно перемещающимися кулачковыми линейками. В приборах чаще используют вращающиеся кулачки, которые в зависимости от формы бывают дисковые и цилиндрические (рис. ). Преобразование движений по заданной функциональной зависимости между перемещением ведомого и ведущего звеньев определяется профилем кулачка. Наконечники толкателей кулачков бывают цилиндрическими, сферическими и плоскими (рис. ).

Кулачковые передачи используются в устройствах, работающих по заданной непрерывной программе или дискретной циклограмме.
3.2. Рычажные механизмы.
Плоский и пространственный рычажный механизмы преобразуют движения, перемещения, скорости и силовые воздействия. В рычажных механизмах для преобразования движения используют один или несколько равноплечих или неравноплечих рычагов. В рычажных системах передаточное отношение может оставаться постоянным или изменятся по определенному закону.
Точность рычажного механизма зависит от точности передаточного отношения, которая определяется погрешностью изготовления элементов передачи, жесткостью системы, температурной деформацией элементов передачи и погрешностями, возникающими за счет действия сил трения.

На рис. показано устройство измерения линейного ускорения.
Для преобразования перемещения массы 1 поворот зубчатого сектора 4 применен рычаг 2. Колесо 5 поворачивается вместе с сектором 4. Стрелка на колесе 5 – 6. Деформация тарированной пружины 3 – мера ускорения, отсчитываемого по шкале 7.
3.2.1. Синусный и тангенсный механизмы.
Синусные механизмы служат для преобразования поступательного движения во вращательное и состоит из толкателя 1, движущегося поступательно, и рычага 2, находящегося в колебательном движении. Ведущим звеном может являться как толкатель, так и рычаг.
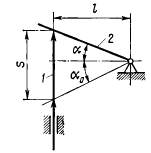
Например, линейное перемещение S
толкателя 1 преобразуется в поворот
рычага 2 на угол
![]() .
Синусные механизмы применяют в сильфонных
манометрах, электроконтактных датчиках,
тахометрах.
.
Синусные механизмы применяют в сильфонных
манометрах, электроконтактных датчиках,
тахометрах.
Тангенсные механизмы применяют для тех же целей, что и синусные. Но при этом в синусных механизмах точка контакта перемещается по плоской поверхности толкателя, а в тангенсных – точка контакта скользит по рабочей поверхности рычага.