

Кинематический анализ плоских стержневых систем. Статически неопределимые рамы и балки
В балках возникают два типа перемещений:
1) Линейные перемещения – прогибы, т.е. перемещение точек оси балки в направлении перпендикулярном оси.
2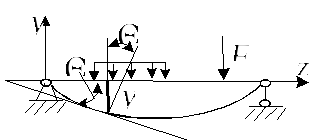 )
Угловые перемещения – углы поворота
сечений, т.е. углы, на которые поворачиваются
при изгибе поперечные сечения.
)
Угловые перемещения – углы поворота
сечений, т.е. углы, на которые поворачиваются
при изгибе поперечные сечения.
![]() - прогиб;
- прогиб;
![]() - угол поворота
- угол поворота
![]() .
Очевидно,
.
Очевидно,
что
![]() т.к.
т.к.
![]() ,
то
,
то
![]() ,
откуда следует связь:
,
откуда следует связь:
Первая производная
от прогиба есть угол поворота сечения
![]()
Расчет балок на
жесткость производится из условия:
![]()
Величина
![]() называется допускаемым прогибом и
зависит от характера конструкции и
условий ее работы.
называется допускаемым прогибом и
зависит от характера конструкции и
условий ее работы.
52)_А
Метод сил. Уравнения метода сил.
Изложение теории будем сопровождать примером расчета рамы. Расчет статически неопределимых систем по методу сил начинается с выбора основной системы.
Определение.
Основной системой называется система статически определимая, кинематически неизменяемая, полученная из данной путем отбрасывания лишних связей.
Замечание 1. Отбрасывание связей осуществляется либо путем отбрасывания опорных стержней, либо путем введения разрезов стержней Замечание 2. Нельзя выбирать в качестве основной системы мгновенно изменяемые системы.
С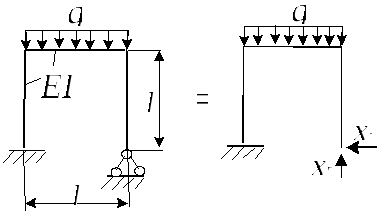 огласно
аксиоме связей, отбросив связи, мы должны
заменить их действия реакциями: реакциями
отброшенных опорных закреплений,
внутренними силовыми факторами в местах
разрезов. Эти реакции отброшенных связей
называются обычно основными
неизвестными
(
огласно
аксиоме связей, отбросив связи, мы должны
заменить их действия реакциями: реакциями
отброшенных опорных закреплений,
внутренними силовыми факторами в местах
разрезов. Эти реакции отброшенных связей
называются обычно основными
неизвестными
(![]() ).
).
Основная система, нагруженная помимо заданных сил основными неизвестными, называется эквивалентной системой. Пример.
Построить эпюру моментов для данной статически неопределимой рамы.
Таким образом, расчет сложной статически неопределимой системы заменяется расчетом более простой статически определимой, но часть нагрузки при этом (основные неизвестные) нам известна. Для того, чтобы найти основные неизвестные надо составить условия эквивалентности исходной системы и основной системы, загруженной помимо заданной нагрузки основными неизвестными. Эти условия обычно записываются в форме канонических уравнений метода сил
![]()
где:
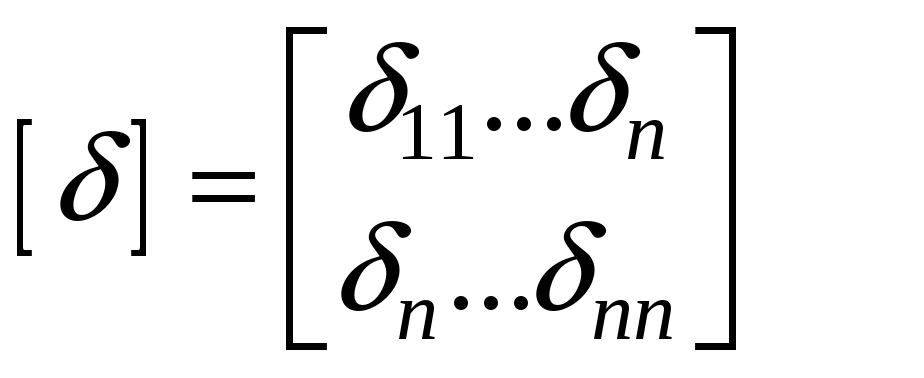 матрица
единичных перемещений или
матрица
единичных перемещений или
![]() или
или
![]()
52)_Б
![]() - изгибающие моменты
в основной системе соответственно от
сил
- изгибающие моменты
в основной системе соответственно от
сил
![]()
![]() - соответственно
площадь эпюры моментов и ордината под
центром тяжести при вычислении интеграла
Мора по правилу Верещагина.
- соответственно
площадь эпюры моментов и ордината под
центром тяжести при вычислении интеграла
Мора по правилу Верещагина.
Т.е.![]() - перемещение по направлению силы
- перемещение по направлению силы
![]() ,
вызванное силой
,
вызванное силой
![]() .
.
По теореме о
взаимности перемещений
![]() при
при
![]() т.е. матрица
т.е. матрица
![]() симметрична.
симметрична.
Очевидно, что при
![]() .
Эти коэффициенты, стоящие на главной
диагонали матрицы, называют обычно
главными, а остальные – побочными.
.
Эти коэффициенты, стоящие на главной
диагонали матрицы, называют обычно
главными, а остальные – побочными.
 - вектор основных
неизвестных;
- вектор основных
неизвестных;
 -вектор
перемещений в основной системе от
заданной силы
-вектор
перемещений в основной системе от
заданной силы
![]() или
или
![]()
![]() - изгибающий момент
от заданной нагрузки.
- изгибающий момент
от заданной нагрузки.
Понятно, что
![]() - перемещение по направлению силы
- перемещение по направлению силы
![]() ,
вызванное заданной нагрузкой.
,
вызванное заданной нагрузкой.
Если записать
уравнения (1) в обычной форме, то они
будут выглядеть
![]()
![]() (1а)
(1а)
![]()
Разберемся в смысле записанных уравнений. Рассмотрим первое из них:
![]() - перемещение по
направлению силы
- перемещение по
направлению силы
![]() ,
вызванное ее же самой,
,
вызванное ее же самой,
![]() -перемещение
в том же направлении,вызванное силой
-перемещение
в том же направлении,вызванное силой
![]()
52)_В
![]() -
перемещение в направлении силы
-
перемещение в направлении силы
![]() ,
вызванное заданными силами.
,
вызванное заданными силами.
Таким образом, каждое из канонических уравнений метода сил можно трактовать как условие равенства нулю перемещения по направлению отброшенной связи (связь то на самом деле есть и она не допускает перемещений в своем направлении).
Для того, чтобы определить коэффициенты в свободные члены системы (1) надо к основной системе приложить единичные силы по направлению основных неизвестных (прикладывая каждую силу порознь), построить единичные эпюры, затем построить эпюру в основной системе от заданных сил. Перемножая полученные эпюры по правилу Верещагина, находим основные неизвестные. Система канонических уравнений в рассматриваемом примере:
![]()
![]()
Построим единичные и грузовые эпюры
Перемножим эпюры по правилу Верещагина.
Экстремум эпюры моментов найдем из суммарной эпюры.
53)_А