

Диференціююча ланка
Ідеальною диференціюючою називається ланка, в якій вихідна величина пропорційна похідній від вхідної велечини:
хвих = Т dxвх/dt , (2.22)
де Т – постійна часу ланки, яка визначається через її параметри.
Передаточна функція ідеальної диференціюючої ланки:
W(p) = xвих(p)/xвх(p) = Тp . (2.23)
З передаточної функції (2.23) видно, що при стрибкоподібній зміні вхідної велечини значення вихідної величини прямує до нескінченості, тобто при хвх = [1]; хвих = ∞ (рис.2.1, д). Звичайно що в реальних ланках такий перехідний процес не можливий та його описання в формі (2.22) ідеалізоване.
Як приклад диференціюючої ланки широко застосовується RC-контур (рис. 2.1, е), для якого на основі законів Ома та Кірхгофа можна записати:
uвх = uс + iR = uс + uвих = 1/C ∫ idt + uвих .
Враховуючи, що і = uвих / R, маємо:
uвх = 1/Т ∫ uвих dt + uвих,
де Т = RC – постійна часу електричного контура, С.
З останнього виразу отримаємо:
Тduвих /dt + uвих = Т duвх /dt. (2.24)
Беручи до уваги, що u вих = хвих ; uвх = xвх, на основі (2.24) запишемо:
Тdxвих/dt + uвих = Тduвх/dt . (2.25)
Підбираючи параметри ланки так, щоб Т dxвих/dt <<хвих, з (2.25) отримаємо рівняння ідеальної диференціюючої ланки – рівняння (2.22).
На вході реальних диференціюючих ланок окрім складової, пропорційної похідній від вхідної велечини, генеруються також і інші складові. В лінійних динамічних системах поряд з ідеальною диференційною ланкою, що описується рівняням (2.22) та передаточною функцією (2.23), в якості типових структурних ланок прийняті також:
-
реальна диференціююча ланка першого порядку, яка описується рівнянням:
k( Тdxвх/dt + xвх) = xвих. (2.26)
-
диференціююча ланка другого порядку, яка описується рівнянням:
k ( Т² d²xвх/dt² + 2ξτ dxвх/dt +xвх) = xвих. (2.27)
Застосовуючи до (2.26) та (2.27) перетворення Лапласа при нульових початкових умовах, отримаєм передаточну функцію диференціюючої ланки першого порядку:
W(p) = xвих(p)/xвх(p) = k(Тp + 1), (2.28)
Та передаточну функцію диференціюючої ланки другого порядку:
W(p) = xвих(p)/xвх(p) = k(Т²p² + 2ξТp + 1) (2.29)
Постійна часу Т та коефіцієнт підсилення ланки k визначається на оснсві параметрів конкретних ланок.
Диференціюючі ланки широко використовуюються як корегуючий пристрій, що вводяться в систему для покращення її динамічних властивостей. За допомогою таких ланок у закони управління вводяться складові, пропорційні похідним по часу за відхиленням чи збуренням, що збільшує швидкодію системи.
Описаними типовими структурними ланками охоплюються всі ланки, можливі в динамічній системі управління. Не важко помітити універсальність приведеного математичного описання. Дійсно, описування ланок динамічних систем з використаням апарату передаточних функцій, що базується на початкових диференційних рівняннях, не залежить від їх фізичної природи. Будь-яка система управління, не залежно від призначення, структури, фізичної природи її елементів може бути представлена математичною моделлю у вигляді сукупності розглянутих вище типових структурних ланок (табл. 1).
Таблиця 1
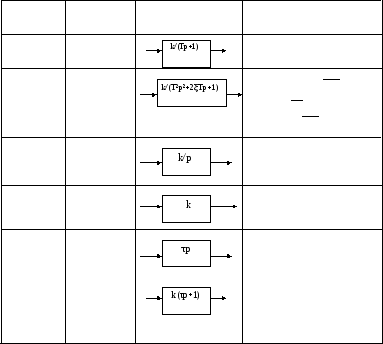
Ланка Передаточна Типова ланка Перехідний процес
функція
хвх хвих
Аперіодична W(p)=k/(Tp+1) хвих=kхвх(1-е-t/T)
Коливальна W(p)= хвх хвих хвих=kxвх[1-(e-ξ t/T)/√1-ξ² *
=k/(T²p²+2ξTp+1)
*sin((√1-ξ² /T)t+
+arctg( √1-ξ²) / ξ) ]