

С.В. ЦЮЦЮРА
ТЕОРІЯ УПРАВЛІННЯ
Конспект лекцій
Київ 2003
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Київський національний університет
будівництва і архітектури
С.В. Цюцюра
ТЕОРІЯ УПРАВЛІННЯ
Конспект лекцій
Київ 2003
УДК 658.512.22.011.56 (075)
ББК 32.965 я (73)
Ц 98
Рецензенти: О.І. Болдаков, канд. техн. наук, доцент
В.В.Демченко, канд. техн. наук, доцент
Відповідальний за випуск В.Б.Задоров, канд. техн. наук, професор
Затверджено на засіданні кафедри ІТ, протокол № 11 від 28.10.2002 року.
Видається в авторській редакції.
ЦюцюраС.В.
Ц98
Теорія управління: Конспект лекцій. – К.: КНУБА, 2001. - 48 с.
Містить питання пов'язані з вивченням математичних моделей ланок лінійних динамічних систем для систем автоматизованого проектування і систем автоматичного управління. Значну увагу приділено питанням забезпечення комплексного підходу до управління автоматизованими системами.
Призначено для студентів спеціальності 7.08042 “Комп’ютерні системи проектування”.
УДК 658. 512. 22. 011.56.(075)
© С.В.Цюцюра, 2003
© КНУБА, 2003
Лінійні динамічні системи управління Лекція 1. Типові з’єднання елементів та їх передаточні функції
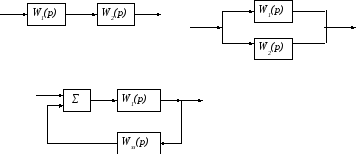
Математична модель лінійної динамічної системи може бути складена на основі математичних моделей елементів та ланок, що створюють систему. Лінійна система в загальному випадку включає в себе ланки, з’єднані послідовно, паралельно, охоплені зворотніми та перехресними зворотніми зв’язками. Передаточні функції всіх цих структур можуть виражатися через передаточні функції типових структурних ланок (рис.1.1).
Послідвне з’єднання ланок. В цьому з’єднанні вихідна велечина попередньої ланки є вхідною величиною наступної ланки (рис.1.1,а). Передаточна функція послідовно з’єднаних ланок дорівнює добутку передаточних функцій всіх ланок, що створюють з’єднання:
W1(p) = x2 (p)/x1(p); W2 (p) = x3(p)/x2(p);
W(p) = x3(p)/x1(p) = W2(p) x2(p)W1(p)/x2(p) = W1(p)W2(p)
В загальному випадку :
W(p) = Π Wi (p), i = 1,n, (1.1)
де n – число послідовно з’єднаних ланок.
Паралельне з’єднання ланок. В цьому з’єднанні (рис.1.1,б) на вхід усіх ланок подається одна і та ж величина, а вихідна величина дорівнює сумі вихідних величин окремих ланок. На основі рис. 1.1,б маємо:
W(p) = xвих(p)/xвх(p) = (x1вих(p) + x2вих(p))/xвх(p) =
=(W1(p)x1вх(p)+W2(p)x2вх(p))/xвх(p).
Так як, x1вх =х2вх = хвх, то W(p) = W1(p) + W2(p), або в загальному випадку при k паралельно з'єднаних ланках.
W(p) = Σ Wi(p), i = 1,k. (1.2)
 x1(p)
x2(p)
x3(p)
x1вх(p)
x1вих(p)
x1(p)
x2(p)
x3(p)
x1вх(p)
x1вих(p)
xвх(p) x вих(p)
x2вх(p) x2вих(p)
а б
хвх(р) х1 (р) xвих (р)
xзз(р)
в
Рис. 1.1. Передаточні функції лінійних динамічних систем
Таким чином, передаточна функція з’єднання з паралельних ланок дорівнює сумі їх передаточних функцій.
Ланка, охоплена зворотним зв’язком. Для цього з’єднання (рис.1.1. в)) запишемо:
x1(p) = xвх(р) ± xзз(р), (1.3)
де знак мінус – для випадку від’ємного зворотного зв’язку, плюс – для додатного.
Передаточна функція з’єднання:
W(p) = xвих(p)/xвх(p) = (W1(p)[xвх(p) ± Wзз(p)xвих(p)]) / /xвх(p), (1.4)
або після перетворення:
W(p) = W1(p)/(1±W1(p)Wзз(p)), (1.5)
де знак плюс відповідає від’ємному зворотному зв’язку, а знак мінус – додатному.
Контрольні запитання до лекції 1