

-
Комплектный эп переменного тока с вентильным двигателем эпб-1
Система, обеспечивающая самый широкий диапазон регулирования скорости – у двигателей с векторным управлением. Особенность этого электропривода состоит в том, что с помощью одного преобразователя частоты осуществляется регулирование скорости двигателя и поддержание потокосцепления в машине на заданном уровне.
Особенность регулирования ЭП с векторным управлением – контролируемые координаты, измеренные в неподвижной системе координат преобразуются к вращающейся системе, из них выделяется постоянное значение, пропорциональное составляющим векторов контролируемых параметров, по которым осуществляется формирование управляющих воздействий, далее обратный переход.
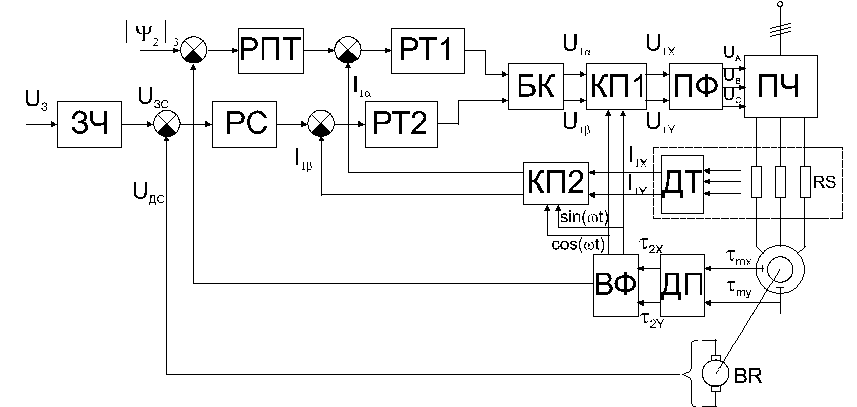
Функциональная схема ЭП с векторным управлением представлена на рисунке 9.18, где приняты обозначения: 23 – сигнал задания потокосцепления; 2 – потокосцепление ротора; I1 – активная составляющая тока; РПТ – регулятор потокосцепления; РТ1, РТ2 – регуляторы тока намагничивания и активного тока; БК – блок коммутации; КП1, КП2 – координатные преобразователи; ПФ – преобразователь фаз; ДТ, ДП – датчики тока и потока (в качестве датчика потока используются элементы Холла); ВФ – вектор-фильтр формирует модуль потокосцепления ротора и сигналы sin(t), cos(t); sin(t), cos(t), синфазные частоте вращения ротора.
Рисунок
9.18
Рисунок
9.19
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
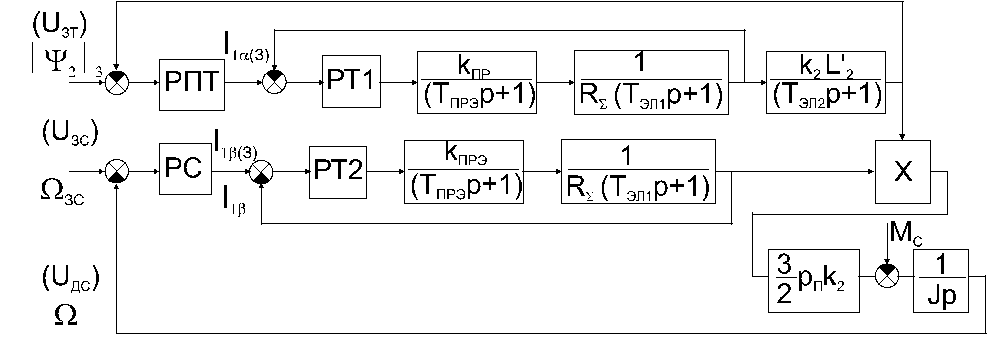
Структурная схема представляет собой двухконтурную систему с внешним контуром скорости и еще одну автономную систему с подчиненным регулированием, обеспечивающую стабилизацию потокосцепления ротора. Контуры регулирования тока одинаковы, некомпенсированной постоянной времени в них является малая эквивалентная постоянная времени преобразователя. Регуляторы в системе рекомендуется выбирать ПИ-типа. Динамические характеристики в этих системах аналогичны характеристикам привода постоянного тока.
Недостатком этих систем является сложность управляющих и функциональных устройств для широкого диапазона регулирования скорости.