

-
Вводная часть
-
Общие понятия, структурная схема аэп
ЭП – электромеханическая система, преобразующая электрическую энергию в механическую.
Управление (У) – организация процесса преобразования энергии, которое обеспечивает в статике и динамике нужную характеристику.
Автоматическое управление (АУ) – управление, осуществляемое без участия оператора.
Автоматическое управляющее устройство (АУУ) – совокупность средств, обеспечивающих автоматическое управление приводом.
Автоматизированный электропривод (АЭП) – ЭП с АУУ
АЭП = ЭП + АУУ
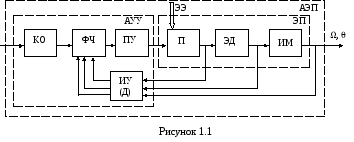
Обобщенная структурная схема представлена на рисунке 1.1, где приведены следующие обозначения:
ЭЭ – электроэнергия.
ЭП: ЭД – электродвигатель – основная часть электропривода; ИМ – исполнительный механизм; П – преобразователь – преобразует энергию сети в электроэнергию с номинальными параметрами. С помощью него осуществляется управление потоком энергии, подводимой к двигателю.
АУУ: КО – командный орган – служит для преобразования командных сигналов в электрические сигналы, которые удобны для обработки другими звеньями ЭП; ФЧ – функциональная часть; АУУ – преобразует командные сигналы, формирует требуемый процесс управления (сюда входят все регуляторы, имеющиеся в системе); ИУ (Д) – измерительные устройства (датчики) – измеряют контролируемые параметры (как электрические, так и не электрические) и преобразуют их в электрические сигналы; ПУ – промежуточный усилитель.
-
Историческая справка
1 800
г – элемент вольта (вольтов столб);
800
г – элемент вольта (вольтов столб);
1
ЭП
1838 г – первый электропривод. Якоби поставил двигатель на свою яхту;
1 800
г – первое промышленное применение –
на военных кораблях;
800
г – первое промышленное применение –
на военных кораблях;
1890 г – на промышленных предприятиях;
1920 г – появились реле, контакторы и прочая элементная база АУУ;
1930 г – промышленное применение ЭП – система Генератор –Двигатель (ГД);
1
АЭП
1950 г – появился ионный ЭП (на ртутных вентилях, инертроны, театроны);
1960 г – появились тиристоры, а, следовательно, тиристорный АЭП;
1990 г – IGBT транзисторы – гибриды, у которых на входе – полевой транзистор, на выходе – биполярный.
-
Задачи, решаемые аэп
З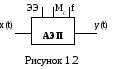 адачи,
решаемые АЭП, в соответствии с рисунком
1.2, зависят от характера входного сигнала
х(t)
и его соответствия требуемому закону
изменения выходного сигнала у(t).
адачи,
решаемые АЭП, в соответствии с рисунком
1.2, зависят от характера входного сигнала
х(t)
и его соответствия требуемому закону
изменения выходного сигнала у(t).
1. Формирование требуемого закона изменения выходного сигнала в переходных режимах. Эта задача решается, когда входной сигнал прикладывается скачком и определяет либо конечное значение регулируемой величины, либо является просто командой на пуск, торможение, реверс и т.д.
У(t)=f1{х(t)}, где f1 – функция зависимости от допустимых токов двигателя, ускорения, температуры и т.д.
2. Поддержание с некоторой точностью в статике и динамике соответствия между выходной величиной и задающим воздействием. Задача решается, когда х(t) является желаемым законом изменения у(t).
у(t)=кх(t) – такое соответствие выдерживать достаточно сложно, т.к.:
-
действуют возмущения (изменения момента на валу, напряжения питающей сети, температуры и т.д.);
-
имеется инерционность элементов АУУ и ЭП;
-
имеется нестабильность параметров звеньев;
-
ограниченная чувствительность звеньев;
-
неоднозначность элементов (гистерезис).
3.Оптимизация процесса изменения выходной регулируемой величины при изменении задающего воздействия в соответствии с принятыми критериями качества.
У(t)=f2[х(t)], где f2 – определяется принятым критерием, например, быстродействием, колебательностью, потерями.