

-
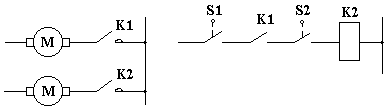
Технологические блокировки
Обеспечивают определенную последовательность работы схем.
Пример внутренней технологической блокировки – на рисунке 2.43. Реле времени КТ3 выполняет роль внутренней технологической блокировки (РДТ), которое запрещает включение контактора противоположного направления, пока не закончилось динамическое торможение.
П
Рисунок
2.43
Рисунок
2.44
-
Сигнализация в системах АЭП
1. Контрольная.
2. Технологическая.
3. Аварийная.
-
Контрольная сигнализация
С
Рисунок
2.45
-
Технологическая сигнализация
Указывает последовательность операций, совершаемых системой АЭП (см. рисунок 2.46).
-
Аварийная сигнализация
У
Рисунок
2.46 Рисунок 2.47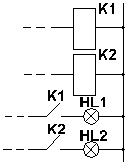
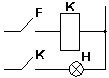
Принцип построения щита аварийной сигнализации – это принцип темного табло, т.е. ни одна из ламп при нормальном режиме работы не должна гореть.
Сигнализации бывают:
– световая;
– звуковая;
– указательная.
-
Станции управления
Станции управления (СУ) – это объединенная общая конструкция комплектного устройства, предназначенного для дистанционного управления электроустановкой.
В схему добавлены аппараты защиты, а также, элементы для обеспечения блокировок с другими устройствами.
-
Реверсивный магнитный пускатель
Самой простой станцией управления является магнитный пускатель, предназначенный для пуска АД с к.з. ротором при мощности менее 75 кВт.
Рисунок 2.48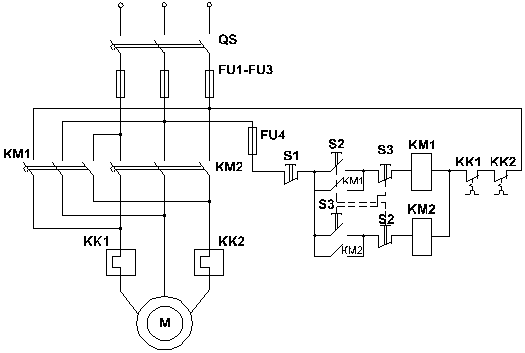
Пример реверсивного магнитного пускателя – на рисунке 2.48, где приняты обозначения: QS – не автоматический выключатель; FU1 FU2 – предохранители для силовой цепи и цепи управления; KM1, KM2 - реверсивные контактеры; KK1, KK2 – тепловые реле; S1 S3 – кнопочная станция.
Схема обеспечивает: пуск двигателя по естественной характеристике, реверс с торможением противовключением, останов (S1) под действием Мс на выбеге.
В схеме предусмотрены защиты: максимальная токовая (с помощью предохранителей), тепловая (с помощью тепловых реле), нулевая (осуществляется контактором).
-
Станция управления пу13-21
Схема релейно-контактная реверсивного электропривода постоянного тока с двухзонным регулированием скорости – станция управления ПУ13-21.
Предназначена для управления ДПТ средней и большой мощности, работающих в повторно-кратковременном режиме. Станция имеет по три положения вперед и назад, обеспечивает пуск до естественной механической характеристики в три ступени вфункции времени, разгон во второй зоне в функции тока, динамическое торможение в функции скорости (см. рисунок 2.49).
Рисунок
2.49
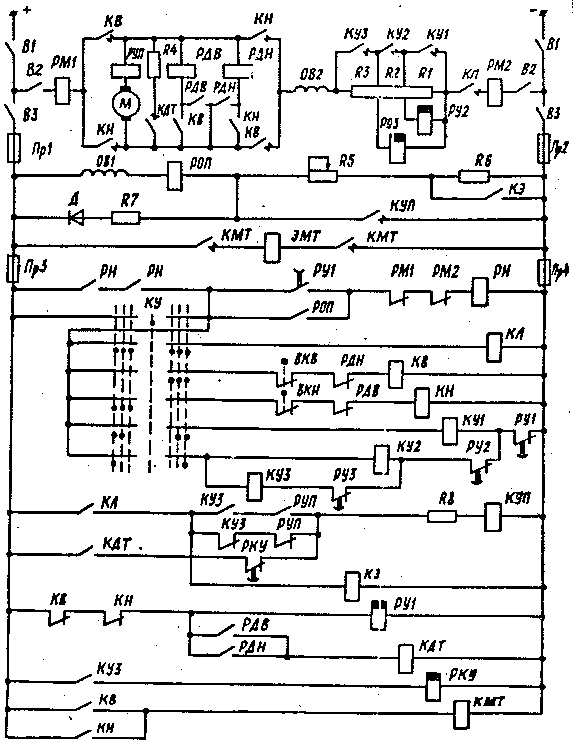
На рисунке приняты обозначения: В1, В2, В3 – выключатели не автоматические; РМ1, РМ2 – реле максимального тока (максимальная токовая защита); РУП, КУП – реле и контактор управления полем; РДВ, РДН – реле динамического торможения с направлением ”вперед”, ”назад”; КДТ – контактор динамического торможения; РОП – реле обрыва поля (минимальная токовая защита); ЭМТ, КМТ – электромагнит и контактор механического тормоза; РН – реле напряжения (защита от самозапуска); КУ – ключ управления; КЛ, КВ, КН – контакторы (линейный, вперед, назад); КУ1, КУ2, КУ3 – контакторы ускорения; РУ, РУ2, РУ3 – реле ускорения; КЭ – контактор экономический (для уменьшения тока в цепи ОВ на стоянке привода); РКУ – реле контроля ускорения (замкнутый контакт при работе в первой зоне обеспечивает номинальное поле, при торможении из второй зоны контакт РКУ замыкается с выдержкой времени, достаточной для организации усиления поля в функции тока); R1, R2, R3 – пусковые ступени сопротивления; R4 – резистор динамического торможения; R5 – регулируемое сопротивление (определяет рабочую точку при ослаблении поля во второй зоне); R6 – резистор, служащий для уменьшения тока в обмотке возбуждения на стоянке; R7 – резистор, служащий для защиты от перенапряжений вместе с диодом VD; R8 – резистор, служащий для уменьшения постоянной времени, при увеличении потерь в цепи катушки КУП (чтобы он успевал реагировать на замыкание и размыкание контактора РУП); ВКВ, ВКН – конечные выключатели для направления вперед и назад; ПР1ПР4 – предохранители.
Исходное состояние: включены В1, В2, В3, КУ – в нуле; включены РОП, РУ1. В цепи ОВ1 суммарное сопротивление (R5+R6) – экономический режим, ЭМТ – обесточен, электродвигатель заторможен.
Установившейся режим: КУ в первом положении (вперед, назад), разгон по ИХ1 (R1+R2+R3); КУ во втором положении (вперед, назад), разгон по ИХ2 (R2+R3); КУ в третьем положении (вперед, назад), разгон по: ЕХ при R5=0, ИХ при R5 0.
Пуск с переводом ключа в третье положение (вперед)
При переводе ключа в третье положение включены: КЛ, КВ (двигатель подключен к сети и начинается разгон с полностью введенными пусковыми сопротивлениями). Включается КУП, поле нарастает до номинального значения. Включается КМТ, ЭМТ – двигатель растормаживается. Включаются РУ2 и РУ3 от броска тока, включается РДВ и встает на самоблокировку, включается КЭ, отключается РУ1 (отсчет уставки), идет разгон по ИХ1 (см. рисунок 2.50). В момент времени t = tуРУ1 включается КУ1, двигатель выходит на ИМХ2; в момент времени t = tуРУ1+tуРУ2, двигатель выходит на ИМХ3; в момент времени t = tуРУ1+tуРУ2+tуРУ3, двигатель выходит на ЕХ.
При выходе двигателя на ЕХ включается реле РКУ и размыкает свой контакт в цепи КУП, дальнейшее управление поля будет осуществляться через РУП, разгон будет продолжаться в функции тока, момент снижается, т.к. поле двигателя ослабляется. Процесс пуска заканчивается, когда поле двигателя выйдет на уровень, определенный реостатом R5.
Торможение КУ в положении “0”
Якорь двигателя отключается от шин питания. При отключении КЛ и КВ двигатель отключается от питающей сети, отключается КУ1, КУ2, КУ3, включается КДТ, R4 включается параллельно якорю. Одновременно идет усиление поля в функции от тока (с помощью РУП), отключается РКУ (в нем начинается отсчет уставки, по истечении которой, контактор управления полем включается постоянно и поле будет полным).
Помимо электродинамического торможения идет механическое торможение, т.к. КМТ и ЭМТ обесточены.
П
Рисунок
2.51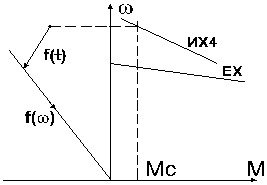
Рисунок
2.50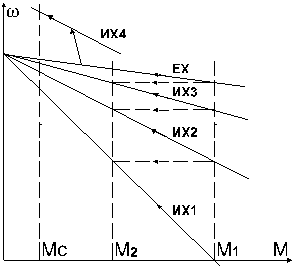
Реверс
Реверс состоит из двух этапов: торможения с предыдущего направления и разгона в противоположное. Для исключения наложения этих режимов в схеме предусмотрена внутренняя технологическая блокировка с помощью РДВ и РДН.
В схеме предусмотрены следующие защиты:
1) Максимальная токовая защита (РМ1, РМ2, ПР1, ПР2 – в цепи двигателя, ПР3, ПР4 – в цепи управления);
2) Минимальная токовая защита (РОП);
3) Нулевая защита (РН);
4) Защита от перенапряжения (R7 и диод).
В схеме предусмотрены следующие блокировки:
1) Механическая блокировка реверсивных контакторов КВ и КН (исключает их одновременное включение);
2) Путевая блокировка с помощью конечных выключателей ВКВ и ВКН;
3) Внутренняя технологическая блокировка с помощью реле РДВ и РДН.