-
Оптимизация контура эдс
Рисунок
5.42
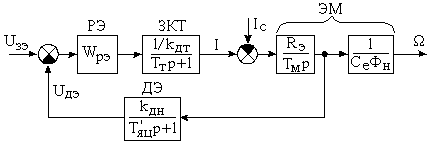
В соответствии с рисунком 5.42, в состав контура ЭДС входят регулятор ЭДС, ЗКТ, датчик ЭДС, интегрирующее звено.
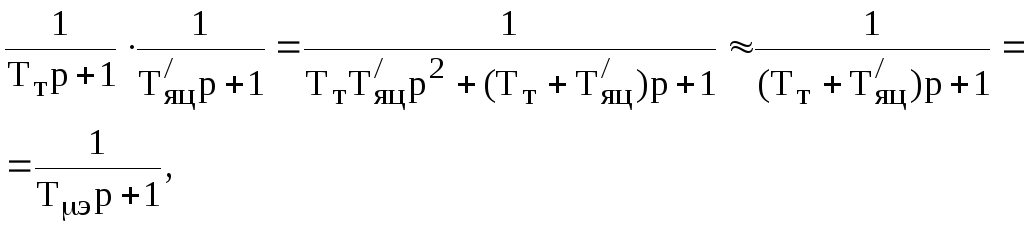
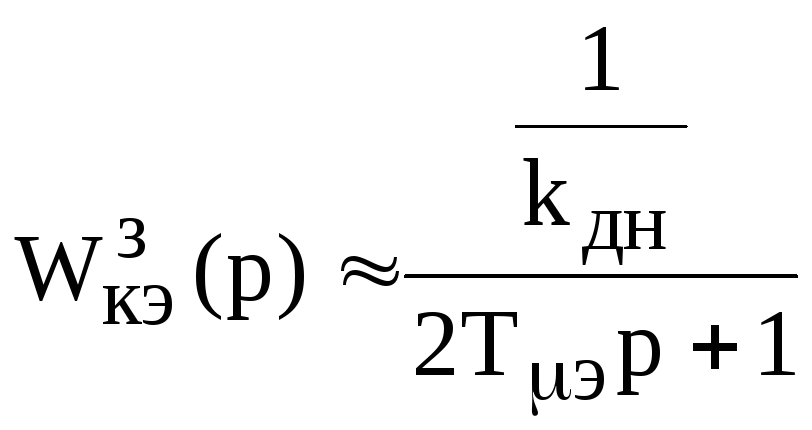
где Тэ = Тт + Тяц – малая постоянная времени контура ЭДС.
МО:
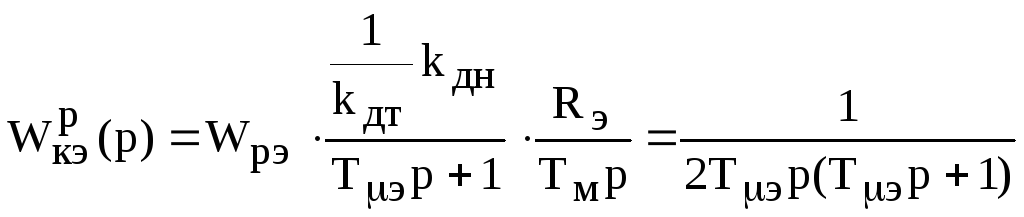 ;
;
![]() .
.
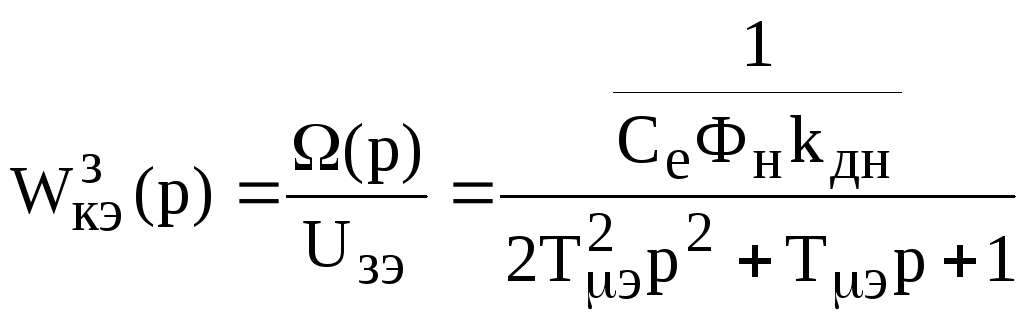
С П-регулятором замкнутый контур ЭДС является по заданию астатическим первого порядка, а по возмущению статическим.
 .
.
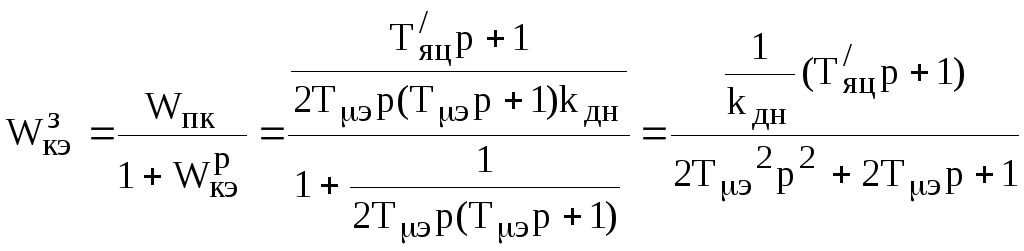
Наличие фильтра в канале датчика ЭДС приводит к повышенному перерегулированию ЭДС двигателя. Настройка контура на МО была проведена по отношению к сигналу датчика ЭДС. Для приведения перерегулирования к норме на входе контура необходимо поставить фильтр с той же постоянной времени, что и у датчика ЭДС.
Тогда передаточная функция замкнутого контура ЭДС будет иметь вид
 .
.
 ;
;
УР:
![]() .
.
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Жесткость скоростных характеристик при больших Тяц может быть хуже, чем в разомкнутой системе. Поэтому при подключении датчика напряжения подбирают такие точки съема сигнала, чтобы Тяц была минимальной.
-
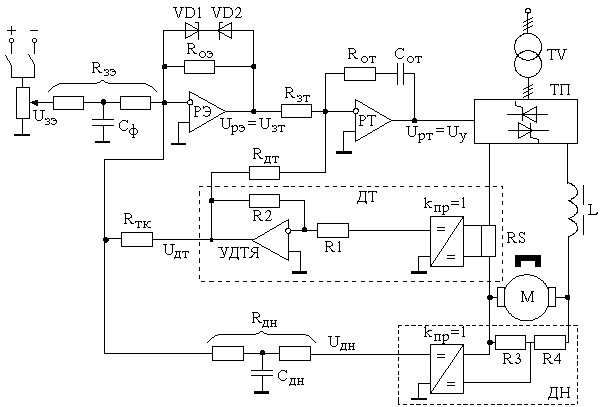
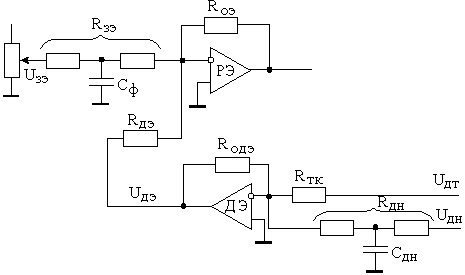
Принципиальная (блочная) схема с обратной связью по эдс и датчиком напряжения
Рисунок
5.43
-

Рисунок 5.43
Порядок расчета элементов принципиальной схемы:
1) принимаем kдн находим kрэ
 ;
;
2) задаемся Сдн;
3)
определяем
![]() ;
;
![]() ;
;
4) рассчитываем Rоэ = kрэRдн;
5)
находим
![]() ;
;
6)
ищем
![]() ;
;
7)
вычисляем резистор токовой компенсации
–
![]() из режима стопорения двигателя
= 0
Е = 0
Uдэ
= 0.
из режима стопорения двигателя
= 0
Е = 0
Uдэ
= 0.
Iтк = Iдн;
![]() ;
;
Uдт = Iдkдт; Uдн = Uдkдн = IдRяцkдн.
Пример расчета параметров и решающих цепей регулятора ЭДС.
Uдн = 220 В; Iдн = 50 А; Rа = 0,2 Ом; Rэ = 0,4 Ом; Rяц = Rа = 0,2 Ом; Тэ = 0,04 с; Тяц = 0,025 с; Тм = 0,02 с.
1)
![]() ;
Uд
(max)
Еdo
= 300В;
;
Uд
(max)
Еdo
= 300В;
 ;
;
2) Сдн = 1мкФ;
3)
![]() ;
;
4) Rоэ = kрэRдн =2100 = 200К;
5)
![]() ;
;
6)
![]() ;
;
7)
![]() ;
;
т.к. Rтк > 500 кОм, то желательно принять Сдн = 45 мкФ;
8) R3, R4 = ?
kдн = kдел kпр = kдел, (kпр = 1);
![]() ;
;
R3 = kднR3 + kднR4;
![]() .
.
Пусть
R3
= 1K, тогда
 .
.
-
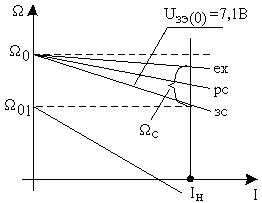
Рисунок 5.44
Посадки скорости в замкнутой системе (рисунок 5.44)
![]() ;
;
![]() ;
;
![]() .
.
Посадки скорости большие и статизм системы велик. При слишком больших посадках (слишком мягкие характеристики) систему с ОС по ЭДС строят с датчиком ЭДС, который при определенных решающих элементах может скомпенсировать инерционность датчика напряжения. В этом случае могут быть получены скоростные характеристики такие же, как в системе с ОС по скорости с П-регулятором.
Фрагмент принципиальной схемы с датчиком ЭДС представлен на рисунке 5.45.
а) б) Рисунок
5.45
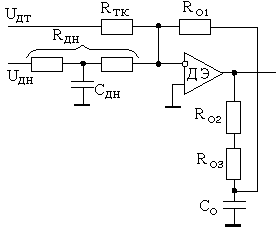
Пусть на рисунке 5.45б R03 – очень мало.
![]() ;
;
R02C0
Тяц;
![]() .
.
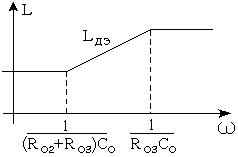
ЛАЧХ датчика ЭДС представлена на рисунке 5.46.
Рисунок
5.46