

-
Системы с самонастройкой
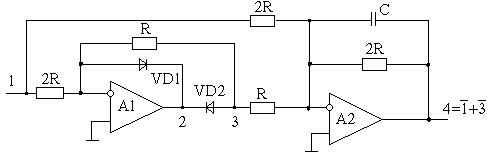
Адаптивная система с самонастройкой по значению амплитудной характеристики на частоте среза представлена на рисунке 7.4, где приняты обозначения: Wм – передаточная функция модели разомкнутой системы; Ф – узкополосные фильтры, выделяющие сигнал тестовой частоты (см. рисунок 7.5); ВМ – выявитель модуля; К – корректирующее звено (интегратор).
Рисунок
7.4
Рисунок
7.5

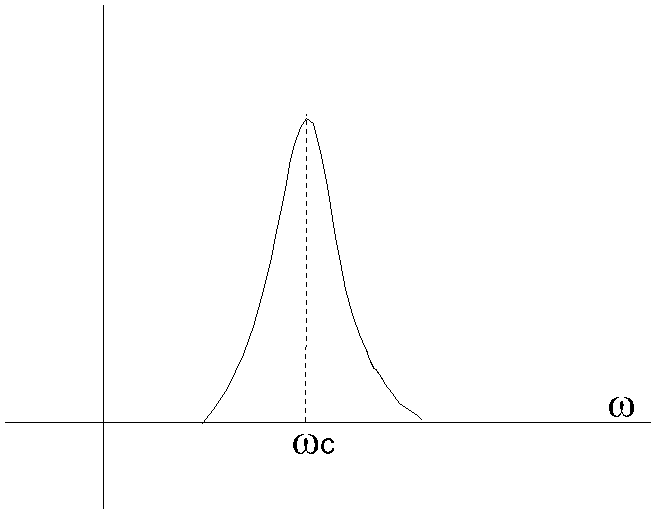
x = Uy + U0 sin t,
где Uy – полезный сигнал;
U0 sin t – готовый сигнал малой амплитуды U0 (U0 берется в виде доли процента от величины полезного сигнала U0 = 10-4–10-5 Uy);
с – тестовая частота (частота среза).
Если система работает в расчетной точке, то сигналы с модели и фактический сигнал равны. Поэтому на вход корректирующего звена поступает ноль, что определяет расчетный коэффициент усиления у регулятора. Если коэффициент в объекте уменьшился, то фактический выходной сигнал y стал меньше yМОДЕЛИ, на входе корректирующего звена появляется положительный сигнал, который должен вызвать увеличение коэффициента усиления у регулятора. Увеличение коэффициента регулятора будет идти до тех пор, пока фактический сигнал не будет равен сигналу с модели. В этом случае на входе корректирующего звена будет опять ноль, а на выходе будет сигнал, который соответствует новому значению коэффициента регулятора. Корректирующее звено интегрального типа и обладает свойством памяти.
Рисунок 7.6
y х y.
Диаграммы сигналов выявителя модуля представлены на рисунке 7.7.
Рисунок
7.7

-
Системы с переключающейся структурой регуляторов
В системе АЭП используют типовые настройки (на СО, МО) контуров регулирования, определяющие статические и динамические свойства системы.
Вид частотной характеристики, частота среза определяют характер переходных процессов (быстродействие, перерегулирование и т.д.). Если при изменении параметров в объекте так изменять параметры регуляторов, чтобы вид частотных характеристик не изменился, то переходные процессы будут инвариантны при изменении параметров объекта.
Рисунок 7.8
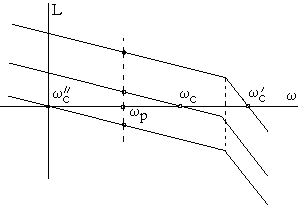
Рисунок 7.9
Рисунок
7.10
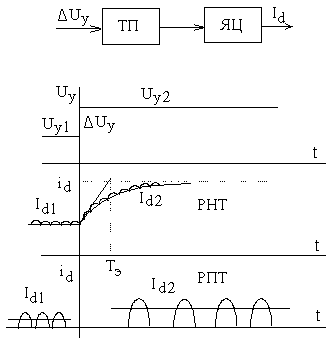
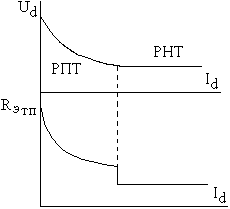
Из
осциллограмм видно, что при одних и тех
же приращениях входного сигнала в режиме
непрерывного тока (РНТ)
больше, но выход на новое значение тока
идет по экспоненте с постоянной времени
Тэ. В режиме прерывистого тока (РПТ)
![]() ,
будет меньше по уровню, но ток выходит
на этот уровень практически мгновенно
(см. рисунок 7.10).
,
будет меньше по уровню, но ток выходит
на этот уровень практически мгновенно
(см. рисунок 7.10).
R/тп (РПТ) R/тп (РНТ) Тэ 0.
Если система АЭП была одноконтурной, то уменьшение коэффициента в звеньях ТП-ЯЦ будет вызывать уменьшение коэффициента в системе и приводить к более демпфированным переходным процессам, но система остается работоспособной. Если привод многоконтурный, то это вызывает снижение быстродействия в контуре тока и потере работоспособности системы в целом.
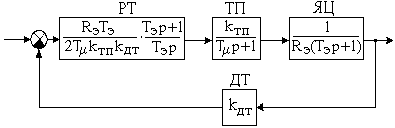
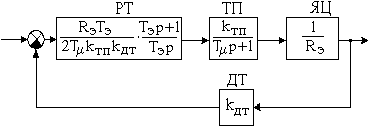
Проанализируем работу контура тока якоря с регулятором тока, рассчитанным для режима непрерывного тока при переходе ТП в режим прерывистых токов. Структурная схема контура тока в режиме непрерывного тока представлена на рисунке 7.11.
Рисунок
7.11
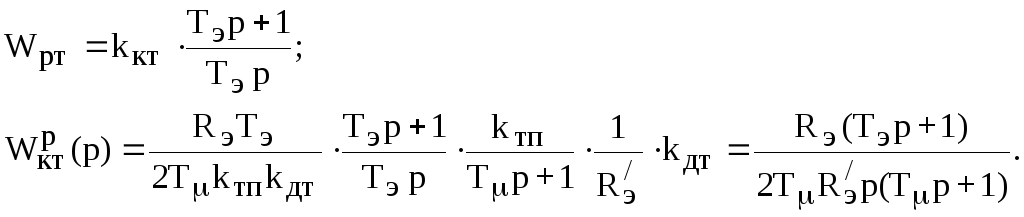
![]()
![]()
![]()
![]() ;
;
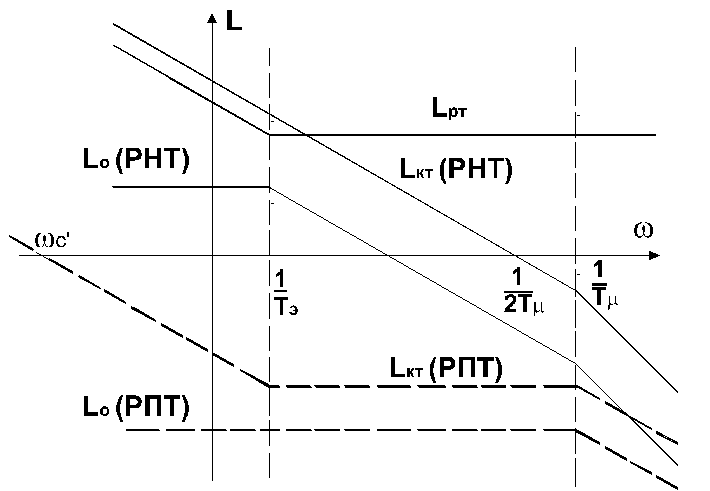
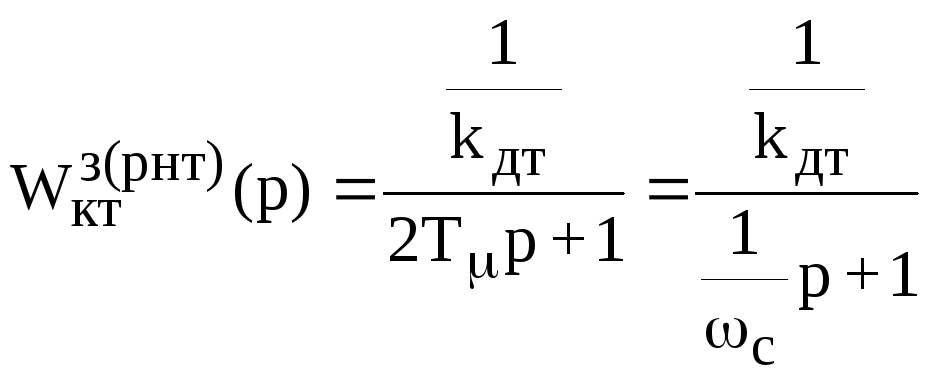
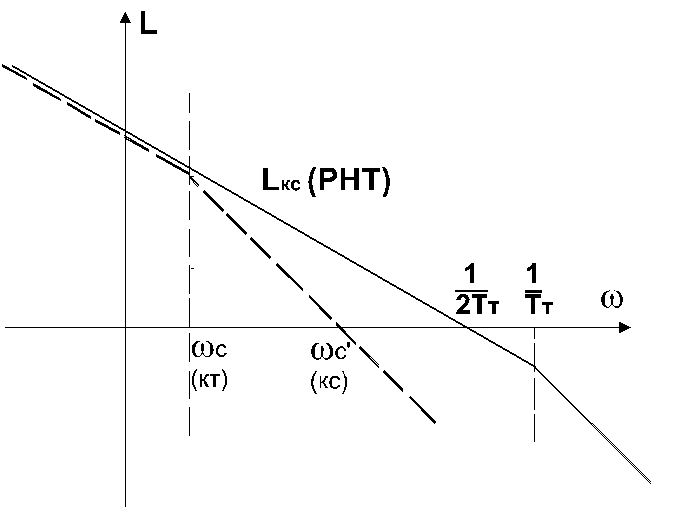
ЛАЧХ контура тока в режиме непрерывного и прерывистого токов представлена на рисунке 7.12.
Рисунок
7.12
![]() – интегрирующее
звено,
– интегрирующее
звено,
где
![]() .
.
![]() .
.
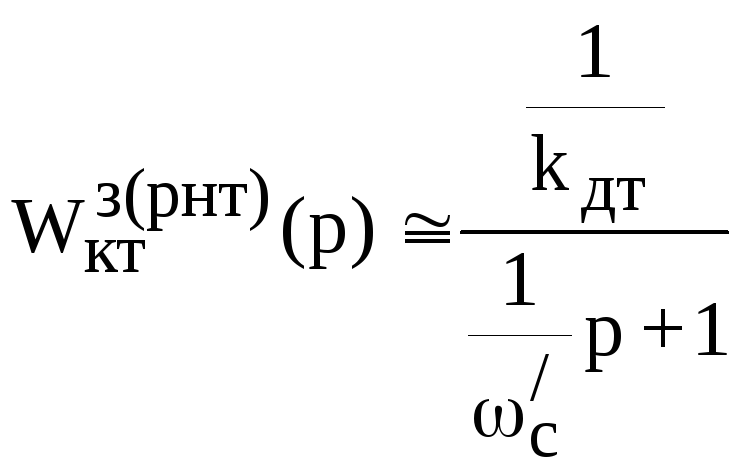
При увеличении Rэ/ частота среза смещается в область более низких частот.
 ;
;
 .
.
С переходом тиристорного преобразователя в режим прерывистых токов контур тока становится более инерционным.
Структурная схема контура тока в режиме прерывистого тока представлена на рисунке 7.13.
Рисунок
7.13
МО:
![]() ;
;
СО:
![]() .
.
В режиме прерывистых токов
![]() ;
;
При настройке на МО
 .
.
При настройке на МО ЛАЧХ контура скорости представлена на рисунке 7.14.
Рисунок
7.14
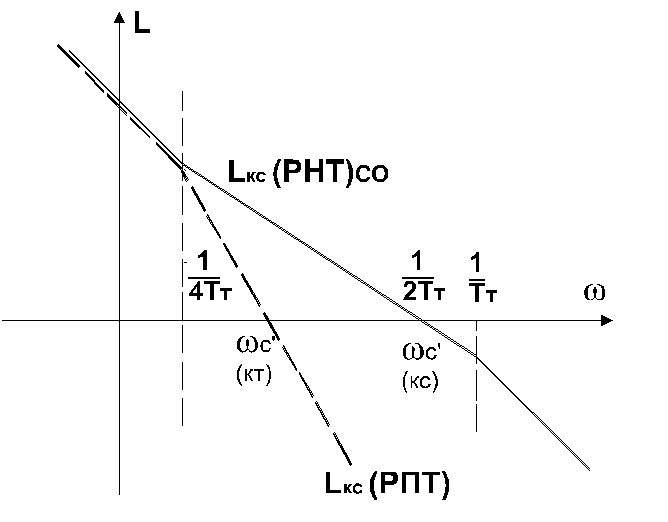
При настройке на СО ЛАЧХ контура скорости представлена на рисунке 7.15.
Рисунок 7.15
Для обеспечения оптимальной настройки системы как в РНТ, так и в РПТ, необходимо одновременно с изменением режима работы преобразователя изменять структуру регулятора тока.