

-
Аналоговая позиционная система аэп
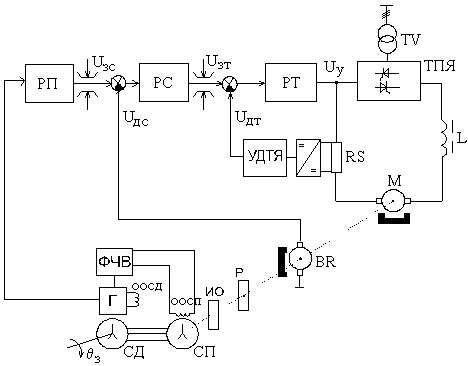
Функциональная схема аналоговой позиционной системы АЭП представлена на рисунке 6.8, где приняты обозначения: РП – регулятор положения; ФЧВ – фазочувствительный выпрямитель; Г – задающий генератор (f = 4001000Гц); СД, СП – сельсинная пара (сельсин-датчик и сельсин-приемник); ИО – исполнительный орган; Р – редуктор с передаточным числом i.
Рисунок 6.8
![]() .
.
О работе сельсинной пары: переменное напряжение, подаваемое с генератора на обмотку сельсина-датчика, создает пульсирующее поле, которое в трехфазной обмотке, расположенной на роторе, наводит ЭДС (амплитуда каждой разности ЭДС зависит от угла между осью поля и осью фазных обмоток). Так как трехфазные обмотки сельсинов соединены, то токи, протекающие по этим цепям, создадут в сельсине-приемнике пульсирующее поле, которое наведет в его однофазной обмотке ЭДС.
Uод.обм.сп = Uоосд cos
где cosугол рассогласования (угол “неодинаковости” расположения роторов этих сельсинов по отношению к их однофазным обмоткам). Если “неодинаковость = 0” , т.е. роторы сельсинов по отношению к своим обмоткам расположены одинаково, то иUоосп = Uоосд.
Для того чтобы в согласованном положении сигнал рассогласовался (был равен нулю), производят предварительную ориентацию сельсинов, поворачивающего ротор одного из сельсинов на угол 900.
В этом случае Uоосп = Uоосд sin.
Напряжение однофазной обмотки сельсина-приемника Uоосп выпрямляется в ФВЧ и ему придается знак в зависимости от знака сигнала рассогласования. Для этого с генератора на ФЧВ подается сигнал, определяющий фазу Uоосд. Если сигналы ООСП и ООСД в фазе, знак сигнала на выходе ФЧВ положительный, если в противофазе – отрицательный.
Коэффициент датчика положения
Кдп = Ксп Кфчв,
где Ксп – коэффициент сельсинной пары.
ИР = СПР + ФЧВ,
где ИР – измеритель рассогласования = сельсинная пара.
![]() .
.
У
современных сельсинных пар Ксп
![]() .
.
Работа системы: Поворотом ротора сельсина-датчика формируется сигнал задания зад. На ООСП наводится ЭДС соответствующей амплитуды, которая выпрямляется ФЧВ с приданием знака зависимости от знака от знака рассогласования. В результате для сигнала рассогласования на выходе РП сформируется сигнал задания на скорость Uзс, который также сформирует сигнал задания на ток Uзт. Сформированный ток двигателя создаст момент, и двигатель начнет отрабатывать сигнал задания до тех пор, пока рассогласование между ротором СД и СП не станет равным нулю = 0, т.е. пока угол рассогласования не будет равным нулю.
-
Оптимизация контура положения при расчете системы в относительных единицах для режима малых перемещений
Режимы малых перемещений не являются типичным для позиционных систем. Регуляторы положения (РП) для режима средних и больших перемещений рассчитываются иначе, чем для режима малых перемещений. Для удобства сравнительной оценки различных настроек позиционной системы перейдем к расчету и оптимизации позиционной системы в относительных единицах.
При выборе базовых значений принимают во внимание следующее:
- в силовой цепи за базовые значения принимают номинальные параметры привода Uн, Iн, nН;
- в системе рассогласования за базовые принимают значения, при которых ОС становятся единичными с учетом того, что в узлах суммарные базовые значения должны быть одни и те же.
Uзт() = Uдт() = Iн Кдт;
Uзc() = Uдc() = нKдс;
Uзп() = Uдп() = Кдп.
![]() – базовое
перемещение – поворот вала исполнительного
двигателя за 1с при вращении со скоростью,
равной номинальной н.
Произведение н
1c
с учетом
коэффициента редукции редуктора
– базовое
перемещение – поворот вала исполнительного
двигателя за 1с при вращении со скоростью,
равной номинальной н.
Произведение н
1c
с учетом
коэффициента редукции редуктора
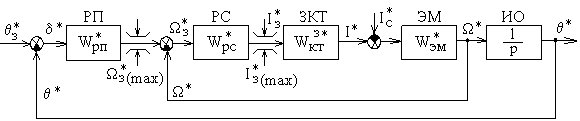
Структурная схема позиционного АЭП в относительных единицах приведена на рисунке 6.9. Сама система осталась 3-х контурной, но мы свернули контур тока.
Рисунок
6.9

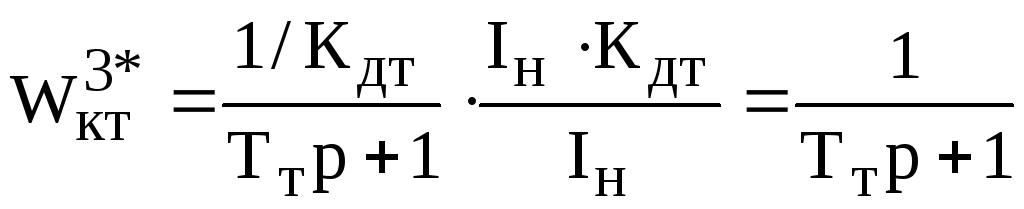
С учетом принятых базовых значений получим передаточные функции в относительных единицах
![]() ;
;
 ;
;
 .
.
Структурная схема в относительных единицах контура положения представлена на рисунке 6.10.
Рисунок 6.10

![]() ;
;
![]() ;
;
![]() ;
;
![]() =
=
=
Крп
=
![]() .
.
Получим тот же результат, который был получен при оптимизации контура положения при его настройке на МО в абсолютных единицах.
Найдем величину ошибки c*.
= 0;
C* К*рп К*рс = I3* = I*C;
C*
=
![]() .
.