

-
Статические характеристики одноконтурной системы аэп с обратной связью по току
Рисунок
4.3
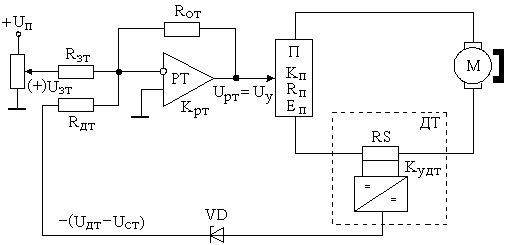
Uy = (Uзт Uдт)крт,
где (+) – для ПОС;
(–) – для ООС.
Еп = Uy кп = Едв + I(Ra + Rп);
Е = сеФн;
Uдт = Iкдт = I(Ra + Rп).
Е = Uyкп – I(Ra + Rп) = [Uзт I(Ra + Rп)]крткп – I(Ra + Rп) =
= Uзткрткп – I(Ra + Rп)(1 крткп)
![]() .
.
Положительная обратная связь по току (ПОС)
![]() .
.
![]() ;
;
![]() .
.
а)
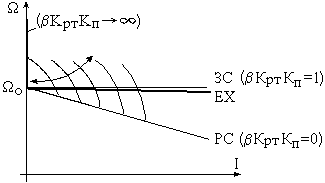
крткп
= 0
![]() ;
;
б) крткп = 1 (+) ЗС = 0 – абсолютно жесткая характеристика;
в) крткп (+) ЗС –.
Положительная обратная связь по току делает характеристики более жесткими, чем те же характеристики в разомкнутой системе (см. рисунок 4.4).
Отрицательная обратная связь по току (ООС)
![]() .
.
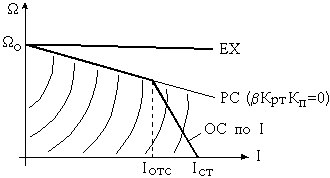
а)
крткп
= 0
![]() ;
;
б) крткп = (–) ЗС = .
Отрицательная обратная связь по току применяется для реализации мягких характеристик ЭП.
Рисунок
4.4
Рисунок
4.5
Численный пример расчета обратной связи.
![]() .
.
Пусть в системе положительная обратная связь по току. Нужно найти , при котором абсолютно жесткая характеристика.
1– крткп = 0,
где крт = 20; кп = 30.
= 1/ крткп = 1/600=0,002.
кдт =? кудт =?
Uдт = Iкдт = I(Ra + Rп);
кдт = (Ra + Rп); кдт = кш кудт; кш = Uшн /Iшн.
![]() .
.
Пример – пусть Рн = 1кВт, Uн = 220В , Iн = 5А , Rа = 4Ом , Rп = 4Ом.
кдт=0 = (Ra + Rп) = 0,002(4 + 4) = 0,016
![]() .
.
![]()
![]() .
.
Рисунок
4.6
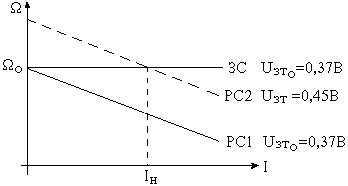
РС1: Uзт1 = 0,37В;
РС2: Uзт2 = 0,37 + 0,08 = 0,45В.
Рассчитанные статические характеристики замкнутой и разомкнутой систем представлены на рисунке 4.6.
-
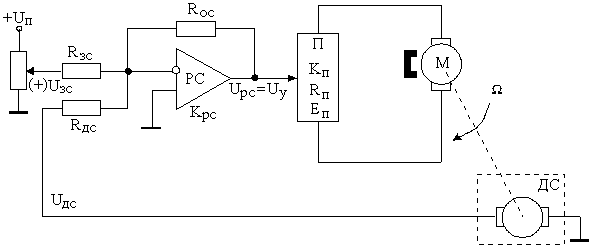
Статические характеристики одноконтурной системы аэп с отрицательной обратной связью по скорости
Система АЭП с отрицательной обратной связью по скорости представлена на рисунке 4.7.
Uy = (Uзс – Uдс)крс (при Rзс = Rдс);
Еп = Uу кп = Е + I(Ra + Rп);
Е = сеФн;
Рисунок 4.7
![]() .
.
(Uзс – кдс)крскп = сеФн + I(Ra + Rп);
Uзскрскп + кдскрскп = сеФн + I(Ra + Rп);
![]() ;
;
![]() .
.
а)
кдскрскп
= 0
![]() ;
;
б) кдскрскп = = 0.
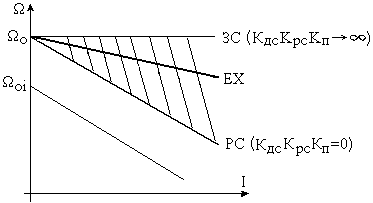
Статические характеристики системы АЭП с отрицательной обратной связью по скорости представлены на рисунке 4.8.
Рисунок 4.8
-
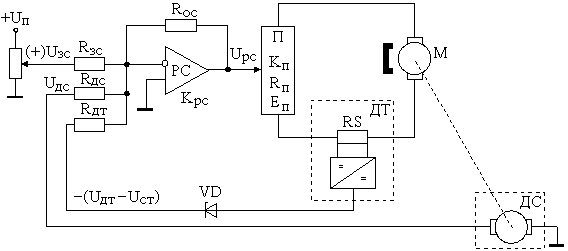
Статические характеристики двухконтурной системы аэп с отрицательной обратной связью по скорости и отсечкой по току
Система АЭП с отрицательной обратной связью по скорости и отсечкой по току представлена на рисунке 4.9.
Рисунок
4.9
В рабочем диапазоне тока справедливы выражения для предыдущего случая, т.к. работает только одна обратная связь по скорости (см. рисунок 4.10).
б) I > Iотс, Uдт> Uст VD.
В этом диапазоне тока одновременно на входе регулятора скорости действуют два сигнала ОС:
- сигнал по скорости, который стремится сделать скоростную характеристику более жесткой;
- сигнал по току, который стремится сделать скоростную характеристику более мягкой.
Для получения требуемой характеристики должна преобладать ОС по току.
Uy = (Uзс – Uдс – Uдт + Uст)крс;
Еп = Uукп = Е + I(Ra + Rп);
Е = сеФн;
Uдс = кдс;
Uдт = I(Ra + Rп).
[Uзс – кдс – I(Ra + Rп) + Uст]крскп = сеФн + I(Ra + Rп);
= 0 – ;
![]() .
.
Статические характеристики двухконтурной системы АЭП с отрицательной ОС по скорости и отсечкой по току представлены на рисунке 4.10.
-
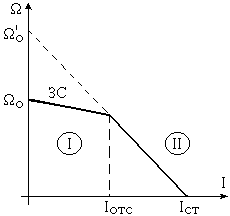
Рисунок 4.10
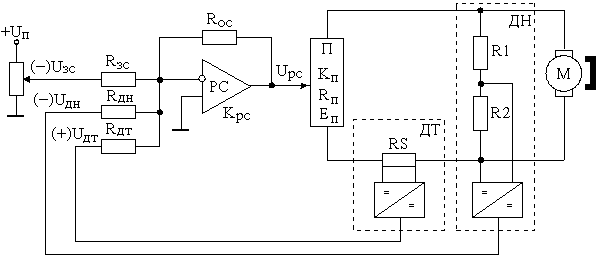
Система АЭП с отрицательной обратной связью по напряжению и положительной обратной связью по току представлена на рисунке 4.11.
Рисунок 4.11
Еп = Uукп = Е + I(Ra + Rп);
Е = сеФн;
кдн = Uдкдн = (Еп – IRп)кдн = (Е + IRa)кдн;
Uдн = I(Ra + Rп).
[Uзс – (сеФн + IRa)кдн + I(Ra + Rп)]крскп = сеФн + I(Ra + Rп);
![]() ;
;
= оi – .
Эта система дает возможность получить жесткие характеристики.