

Лекция1.Показатели качества сар энергоблока с яр типа ввэр-1000.
Отличие САР ЯР от автономного режима заключается в том, что она должна не только производить тепло и обеспечивать ядерную безопасность ЯР, но и поддерживать баланс тепловой мощности между ЯР, парогенераторами и турбогенераторной установкой.
Реальные условия предполагают наличие отказов, шумов и помех во время работы.
Поэтому в процессе проектирования нужно предусмотреть “серые“ вспомогательные системы, которые устраняли бы их влияние на работу всей системы регулирования энергоблока, приведенную на рис.1
После того, как ЯР загружен топливом и выведен на номинальный энергетический уровень мощности, он начинает работу не в автономном режиме, а совместно с энергети-ческой установкой.
При этом он должен проработать в нём непрерывно 300 суток до следующей перегрузки топлива.
Для поддержания этой мощности непрерывно в течение такого длительного промежутка времени с высокой точностью при наличии различного рода возмущений нужны только автоматические устройства.
Они должны выполнять следующие функции:
1.Управлять тепловой мощностью ЭБ и ЯР , автоматически устранять любые отказы в системе управления и
2. Предупреждать перерастание нарушений нормальных условий работы в аварийные.
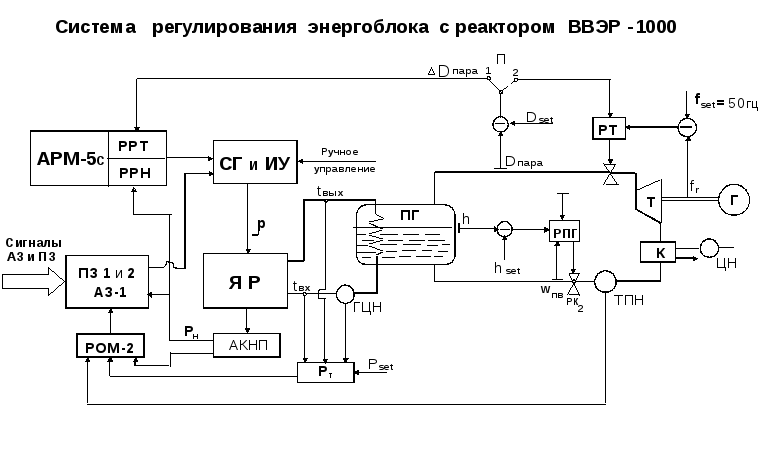
Рис.1. Структура связей трех регуляторов в системе регулирования энергоблока.
Система состоит из следующих элементов:
Т-Г – блока генератора с турбиной,
РТ - регулятора турбины,
К - конденсатора ,
ЦН- циркуляционного насоса ,
ТПН- турбо-питательного насоса ,
РПГ – регулятора парогенератора,
ПГ - парогенератора ,
ЯР - ядерного реактора,
ГЦН- главных циркуляционных насосов ,
РТ – вычислителя тепловой мощности ЯР,
АКНП- аппаратуры контроля нейтронного потока,
СГ и ИУ – система группового и индивидуального управления
стержнями,
АРМ-5с – автоматический регулятор мощности реактора ,
ПЗ и АЗ-1 – предупредительная и аварийная защиты реактора,
РОМ-2 -регулятор ограничения мощности ЯР.
Целями САР ЭБ являются :
1.Производство электроэнергии в нормальных условиях эксплуатации без нарушений и с
нарушениями с погрешностью не более 1%,
2.Работу на пониженных уровнях мощности при нарушениях без полной остановки,
3.Поддержание частоты генератора с погрешностью не более 1% и
4. Полную остановку энергоблока при нарушении пределов безопасной эксплуатации, а
также при мощности ЯР более 107% от номинальной.
Для достижения этих целей элементы САР ЭБ сгруппированы в три взаимодействующих между собой через параметры технологического процесса подсистемы :
-
Система управления и защиты ЯР ( СУЗ ЯР),
-
Парогенератора (ПГ) с регулятором уровня воды в парогенераторе (РПГ) и
-
Турбогенератора ТГ с регулятором турбины
(РТ).
Место регулятора реактора АРМ в системе регулирования энергоблока с ЯР типа ВВЭР-1000.
Целью системы автоматического регулирования энергоблока (САР ЭБ) является производство электроэнергии в нормальных условиях эксплуатации без нарушений и с нарушениями при поддержке его в случае нарушений «серыми« динамическими барьерами.
Как видно из Рис.1 , САР ЭБ состоит из трех основных подсистем регулирования, которые взаимодействуют между собой через параметры технологического процесса.
Этими подсистемами являются
:
1.Система Контроля, Управления и Защиты реактора ( СКУЗ ЯР ),
2. Парогенератор (ПГ) с Регулятором уровня воды в парогенераторе ( РПГ) и
3.Турбина (Т) с электрическим генератором (Г) и регулятором турбины (РТ).
Реактор является
источником основной – РН (
нейтронной или по ГОСТ физической
мощностью ) и остаточной Р![]() тепловой мощностью, которые составляют
общую тепловую мощность :
тепловой мощностью, которые составляют
общую тепловую мощность :
РТ = РН
+ Р![]()
100%= 94%+ 6%
Нейтронная мощность РН измеряется Аппаратурой Контроля Нейтронного Потока
( АКНП ) , а общая тепловая мощность РТ вычисляется в виде произведения :
РТ = N ( tВЫХ – tВХ )
где :N – от 1 до 4 –число работающих ГЦН.
Вычислитель РТ относится к одному из серых устройств, которое контролирует реальную тепловую мощность ЯР и сообщает о ней одному из динамических барьеров РОМ-2 .
РОМ-2 сравнивает измеренную нейтронную мощность РН с тепловой РТ и в зависимости от числа работающих Турбопитательных Насосов – ( их два параллельно работающих для повышения надёжности ) дает сигнал на Предупредительную Защиту ПЗ-1 для автоматического снижения мощности в зависимости от вида нарушения .
Более подробно мы рассмотрим работу этих Динамических Барьеров в разделе Энергетический Режим работы САР ЯР.
Это тепло ЯР от первого контура теплоносителем передается парогенераторам и через второй контур –турбогенератору.
Таким образом, баланс тепловой мощности между потребляемой мощностью от электрического генератора и производимой реактором осуществляется тремя основными регуляторами, приведенными на Рис 1.
Для повышения надёжности и готовности регуляторов выполнять свои функции все три регулятора троекратно резервируются и снабжаются логическими фильтрами
« 2 из 3 «, о которых Вы узнаете из темы 4 нашего курса.
Этими регуляторами являются :
-
Автоматический регулятор мощности
реактора – АРМ-5с ;
-
Регулятор уровня воды в парогенера-
торе – РПГ;
-
Регулятор турбины – РТ.
Работа регулятора АРМ в СУЗ ЯР.
Регулятор АРМ состоит из двух регуляторов: а) Регулятора Реактора по теплотехническому параметру-давлению пара (РРТ) и б) Регулятора Реактора по Нейтронному потоку ( РРН).
Оба регулятора воздействуют на ЯР через общую Систему Группового и Индивидуального Управления ( СГ и ИУ) стержнями реактора.
Всего таких стержней 61 с индивидуальными шаговыми двигателями поступательного перемещения.
Функционально эти стержни разбиты на 10 групп по 6 стержней в каждой группе:
-
Группы с 1 по 6 выполняют функции аварийной остановки ЯР ( АЗ-1), а 5 группа используется для коррекции искажения поля нейтронного потока по высоте.
-
Группы 7-9 используются для ручного управления при пуске реактора и
-
Только одна 10 группа с 6 стержнями, поглотительной способностью по 0,2 b используются для автоматического регулирования на номинальном уровне мощности реактора.
Это сделано для повышения безопасности при отказах регуляторов РРТ и РРН.
Регулятор РРН является основным при работе на малых и больших уровнях мощности и он поддерживает нейтронную мощность в ЯР постоянной в пределах 100 +2%.
Регулятор РРТ включается только после окончания пуска на номинальном уровне мощности переключателем П в положение 1. Он поддерживает давление пара на выходе из коллектора 4 парогенераторов постоянным 62 + 0,5 кгс/см2.
Как видно из
Рис.1. на группу стержней поступают
также сигналы ручного управления,
разрешающие перемещение стержней вверх
и вниз, и сигналы от Предупредительных
Защит ( ПЗ-1 и ПЗ-2 ) а также от РОМ и АЗ-1
,которые могут автоматически только
снижать мощность или полностью
останавливать ЯР при РН![]() 107%.
107%.