

§7. Просторова система сил.
Щоб перейти до розв’язування задач статики для системи сил, довільно розміщених в просторі, необхідно уточнити і розширити ряд введених раніше понять.
7.1. Момент
сили відносно точки як вектор.
Момент сили
![]() відносно точки О, як характеристика її
обертального ефекту, визначається
трьома елементами: 1) величиною, яка
дорівнює добутку величини сили на плече;
2) площиною дії момента, що визначається
точкою О і лінією дії сили
відносно точки О, як характеристика її
обертального ефекту, визначається
трьома елементами: 1) величиною, яка
дорівнює добутку величини сили на плече;
2) площиною дії момента, що визначається
точкою О і лінією дії сили
![]() ;
3) напрямком повороту в площині дії
момента (мал. 1.38).
;
3) напрямком повороту в площині дії
момента (мал. 1.38).
П ри
вивченні плоскої системи сил задані
сили і точка лежать в одній площині,
тому необхідність кожен раз задавати
площину дії момента відпадає, момент
задавався як скалярна алгебраїчна
величина, яка дорівнює
ри
вивченні плоскої системи сил задані
сили і точка лежать в одній площині,
тому необхідність кожен раз задавати
площину дії момента відпадає, момент
задавався як скалярна алгебраїчна
величина, яка дорівнює
![]() ,
де знак вказує напрям повороту.
,
де знак вказує напрям повороту.
У випадку довільної
просторової системи сил положення
площини дії момента задавати вектори,
перпендикулярним до цієї площини. Якщо
одночасно величина цього вектора
дорівнюватиме величині момента, а
напрямок узгодити з напрямком повороту
в площині дії момента, то такий вектор
визначить всі елементи, що характеризують
момент сили
![]() відносно точки О.
відносно точки О.
Вектором-моментом
сили
![]() відносно точки О називається вектор
відносно точки О називається вектор
![]() ,
прикладеній в точці О, величина якого
дорівнює добутку величини сили
,
прикладеній в точці О, величина якого
дорівнює добутку величини сили
![]() на плече h,
і направлений перпендикулярно до площини
дії момента в той бік, який визначається
правилом гвинта. Величина момента сили
відносно точки дорівнює подвоєній площі
трикутника АОВ.
на плече h,
і направлений перпендикулярно до площини
дії момента в той бік, який визначається
правилом гвинта. Величина момента сили
відносно точки дорівнює подвоєній площі
трикутника АОВ.
Використовуючи
властивості векторного добутку двох
векторів, вектор
![]() подано у вигляді
подано у вигляді
![]() , (1.32)
, (1.32)
де вектор
![]() називається радіус вектором точки А
відносно центра О.
називається радіус вектором точки А
відносно центра О.
Допустимо, що
через точку О проведено координатні
осі x, y, z.
(мал. 1.38) і вектори
![]() ,
,
![]() характеризуються проекціями
характеризуються проекціями
![]() ,
,
![]() ,
а точка А має координати
,
а точка А має координати
![]() .
Тоді, враховуючи, що
.
Тоді, враховуючи, що
![]() ,
дістанемо за відомою формулою векторної
алгебри.
,
дістанемо за відомою формулою векторної
алгебри.
 , (1.33)
, (1.33)
де
![]() — одиничні вектори координатних осей.
Нехай
— одиничні вектори координатних осей.
Нехай
![]() .
.
Тоді, розкриваючи
в (1.33) визначник справа по елементах
першого рядка, знаходимо проекції
вектора
![]() на координатні осі
на координатні осі
![]() (1.34)
(1.34)
Формули (1.34)
дозволяють, визначивши проекції
![]() ,
знайти вектор
,
знайти вектор
![]() .
.
7.2.
Момент
сили відносно осі.
Розглянемо силу
![]() ,
що діє на АТТ. Нехай це тіло може обертатися
навколо деякої осі Z (мал. 1.39).
,
що діє на АТТ. Нехай це тіло може обертатися
навколо деякої осі Z (мал. 1.39).
Проведемо
довільну
площину
ху
перпендикулярно осі Z
і спроектуємо на неї силу
![]() .
.
Моментом сили
відносно осі Z
називається момент проекції
![]() сили
сили
![]() на площину, перпендикулярну осі Z
відносно точки перетину площини ху
і осі Z.
на площину, перпендикулярну осі Z
відносно точки перетину площини ху
і осі Z.
![]()
 (1.35)
(1.35)
З приведеного означення випливає, що момент сили відносно осі — вектор, направлений вздовж осі Z за правилом гвинта. Його величина визначається подвоєною площею трикутника ОА1В1.
Якщо сила
![]() ненульова, то її момент відносно будь-якої
осі дорівнює нулю в двох випадках:
ненульова, то її момент відносно будь-якої
осі дорівнює нулю в двох випадках:
а) лінія дії сили перетинає вісь (в цьому випадку точки О, А1, В1 лежать на одній прямій);
б) сила паралельна осі (точки А, В збігаються).
В обох випадках сила і вісь розміщені в одній площині.
Установимо зв’язок
між
моментом
сили
![]() відносно точки О і моментом сили
відносно точки О і моментом сили
![]() відносно осі Z,
що проходить через цю точку. Виходячи
і геометричного змісту момента сили
відносно точки і осі, можна записати
відносно осі Z,
що проходить через цю точку. Виходячи
і геометричного змісту момента сили
відносно точки і осі, можна записати
![]() (1.36)
(1.36)
Оскільки ОА1В1 є проекція ОАВ на площину ху, то
![]() (1.37)
(1.37)
де φ — кут між площиною трикутників ОА1В1 і ОАВ.
На підставі рівностей (1.36), (1.37) можна записати
![]() (1.38)
(1.38)
В результаті ми довели таке твердження: проекція вектора — момента сили відносно деякої точки на вісь, що проходить через цю точку, дорівнює моменту сили відносно цієї ж осі.
Враховуючи останнє
твердження і співвідношення (1.34), запишемо
аналітичні вирази для моментів сили
![]() відносно координатних осей
відносно координатних осей
![]() ;
;
![]() , (1.39)
, (1.39)
де х,
у, z —
координати точки А прикладання сили
![]() .
.
Оскільки момент
сили
![]() відносно осі Z не залежить від положення
точки О на цій осі, то вектор
відносно осі Z не залежить від положення
точки О на цій осі, то вектор
![]() — ковзний вектор.
— ковзний вектор.
7.3. Теорема про перенесення пари сил в паралельну площину. В п.4.4. було доведено, що дві пари, розміщені в одній площині, еквівалентні, якщо вони мають однакові моменти. Доведемо тепер іншу теорему: дія пари сил на тверде тіло не зміниться, якщо її перенести із заданої площини в будь-яку іншу площину, їй паралельну.
 Нехай
пара
Нехай
пара
![]() розміщена в площині І (мал. 1.40). Розглянемо
площину ІІ, яка паралельна площині І, і
виберемо в ній відрізок CD, рівний і
паралельний АВ. В точках C і D прикладемо
чотири попарно зрівноважені сили
розміщена в площині І (мал. 1.40). Розглянемо
площину ІІ, яка паралельна площині І, і
виберемо в ній відрізок CD, рівний і
паралельний АВ. В точках C і D прикладемо
чотири попарно зрівноважені сили
![]() .
Побудований чотирикутник ABCD це
паралелограм, діагоналі якого діляться
в точці О пополам. Додамо паралельні
сили
.
Побудований чотирикутник ABCD це
паралелограм, діагоналі якого діляться
в точці О пополам. Додамо паралельні
сили
![]() і
і
![]() ,
,
![]() і
і
![]() .
Вони заміняться відповідно рівнодійними
.
Вони заміняться відповідно рівнодійними
![]() і
і
![]() ,
які внаслідок їх зрівноваженості можна
відкинути. В результаті пара
,
які внаслідок їх зрівноваженості можна
відкинути. В результаті пара
![]() замінилася такою ж парою
замінилася такою ж парою
![]() ,
але розміщеною в площині ІІ. Із доведеної
теореми випливає, що дві пари сил,
розміщені в паралельних площинах, і які
мають однакові моменти, будуть
еквівалентні.
,
але розміщеною в площині ІІ. Із доведеної
теореми випливає, що дві пари сил,
розміщені в паралельних площинах, і які
мають однакові моменти, будуть
еквівалентні.
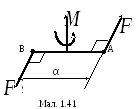 7.4.
Момент
пари як вектор.
Дія пари сил на тверде тіло буде визначена,
якщо відомі: 1) величина момента пари;
2) площина дії пари; 3) напрямок повороту
в цій площині. При розгляді пар в просторі
для характеристики кожної з них необхідно
задавати всі ці три елементи. Їх можна
визначити однозначно, якщо момент пари
сил зобразити вектором
7.4.
Момент
пари як вектор.
Дія пари сил на тверде тіло буде визначена,
якщо відомі: 1) величина момента пари;
2) площина дії пари; 3) напрямок повороту
в цій площині. При розгляді пар в просторі
для характеристики кожної з них необхідно
задавати всі ці три елементи. Їх можна
визначити однозначно, якщо момент пари
сил зобразити вектором
![]() ,
величина якого (в вибраному масштабі)
дорівнює моменту пари Fd,
напрямок перпендикулярний до площини
дії пари і визначається за правилом
гвинта (мал. 1.41).
,
величина якого (в вибраному масштабі)
дорівнює моменту пари Fd,
напрямок перпендикулярний до площини
дії пари і визначається за правилом
гвинта (мал. 1.41).
Оскільки пару сил
можна довільно розміщати в площині дії
або паралельній до неї площині, то вектор
![]() може бути прикладений в довільній точці
твердого тіла (такий вектор називається
вільним).
може бути прикладений в довільній точці
твердого тіла (такий вектор називається
вільним).
7.5. Додавання пар в просторі. Умови рівноваги системи пар. Правило додавання пар, які діють на тверде тіло в різних площинах, визначається теоремою: довільна система пар, що діє на тверде тіло, еквівалентна одній парі, момент якої дорівнює геометричній сумі моментів складових пар.
 Доведемо
теорему спочатку для системи пар
Доведемо
теорему спочатку для системи пар
![]() ,
,
![]() ,
моменти яких відповідно дорівнюють
,
моменти яких відповідно дорівнюють
![]() і
і
![]() .
Розглянемо на лінії перетину площин
дії пар відрізок АВ. Користуючись
властивостями пар, зобразимо дані пари
зведеними до відрізка АВ (мал. 1.42). при
цьому повинні виконуватися співвідношення
.
Розглянемо на лінії перетину площин
дії пар відрізок АВ. Користуючись
властивостями пар, зобразимо дані пари
зведеними до відрізка АВ (мал. 1.42). при
цьому повинні виконуватися співвідношення
![]() .
.
Додаючи сили, які
прикладені в точках А, В, переконуємося,
що пари
![]() і
і
![]() замінюються парою
замінюються парою
![]() .
Визначимо момент
.
Визначимо момент
![]() цієї пари. Розглянемо рівність
цієї пари. Розглянемо рівність
![]() .
Помножимо її зліва на вектор
.
Помножимо її зліва на вектор
![]() і, врахувавши, що момент пари дорівнює
моменту однієї із сил пари відносно
точки прикладання іншої, на основі
формули (1.32) дістанемо
і, врахувавши, що момент пари дорівнює
моменту однієї із сил пари відносно
точки прикладання іншої, на основі
формули (1.32) дістанемо
![]() .
.
З іншого боку
![]() ,
,
Тому
![]() (1.40)
(1.40)
Отже, момент
рівнодійної пари зображується діагоналлю
паралелограма, побудованого на векторах
![]() і
і
![]() ,
як на сторонах.
,
як на сторонах.
Якщо на тверде
тіло діє система пар з моментом
![]() ,
,![]() ,…,
,…,
![]() ,
то послідовно застосовуючи формулу
(1.40), отримаємо, що задана система пар
еквівалентна одній парі з моментом
,
то послідовно застосовуючи формулу
(1.40), отримаємо, що задана система пар
еквівалентна одній парі з моментом
![]() . (1.41)
. (1.41)
Це розв’язок
першої задачі статики для системи пар.
Використовуючи правило додавання
вільних векторів, вектор
![]() можна знайти як замикальну сторону
многокутника, побудованого на векторах
можна знайти як замикальну сторону
многокутника, побудованого на векторах
![]() ,
,![]() ,…,
,…,
![]() (моментного многокутника).
(моментного многокутника).
Одержані результати
дозволяють сформулювати геометричні
і алгебраїчні умови рівноваги системи
пар, що діють на тверде тіло. Оскільки
при рівновазі тіла по винно бути
![]() ,
то момент ний многокутник повинен бути
замкненим. Це геометрична умова рівноваги.
Алгебраїчні умови рівноваги знайдемо,
прийнявши до уваги, що
,
то момент ний многокутник повинен бути
замкненим. Це геометрична умова рівноваги.
Алгебраїчні умови рівноваги знайдемо,
прийнявши до уваги, що
![]() тільки тоді, коли
тільки тоді, коли
![]() ,
або в розгорнутому вигляді
,
або в розгорнутому вигляді
![]() (1.42)
(1.42)
Рівності (1.42) дають розв’язок другої задачі статики для системи пар і виражають відсутність обертань твердого тіла відносно координатних осей. Якщо всі пари розміщені в одній площині (або в паралельних площинах), то їх додавання зводиться до алгебраїчної операції (див.п.4.5).
7.6
Зведення
просторової системи сил до заданого
центру.
Застосуємо одержані вище результати
до розв’язку
першої задачі статики для довільної
системи сил
![]() ,
що діє на тверде тіло. Оскільки теорема
,
що діє на тверде тіло. Оскільки теорема
про паралельне
перенесення сили (§5) має місце для сил,
довільно розміщених у просторі, то
вибравши за центр зведення точку О,
перенесемо
в неї
всі
сили,
додаючи
при цьому
відповідні
пари. Тоді
на твердее тіло
(мал.1.43)
буде діяти збіжна система сил
![]() ,
прикладених у точці О, і система пар,
моменти яких дорівнюють
,
прикладених у точці О, і система пар,
моменти яких дорівнюють
![]() . (1.43)
. (1.43)
З біжна
система сил заміняється однією силою
біжна
система сил заміняється однією силою
![]() ,
яка прикладена в точці О і визначається
рівністю
,
яка прикладена в точці О і визначається
рівністю
![]() (1.44)
(1.44)
Система замінюється однією парою, момент якої, згідно з (1.41), визначається формулою
![]() (1.45)
(1.45)
Як і у випадку
плоскої системи сил, вектор
![]() називається головним вектором заданої
системи сил, а вектор
називається головним вектором заданої
системи сил, а вектор
![]() — головним моментом відносно точки О.
— головним моментом відносно точки О.
Таким чином, розв’язок першої задачі статики для довільної системи сил формулюється так:
Будь-яка система
сил, що діє на тверде тіло, може бути
зведена до однієї сили
![]() (головного вектор) і однієї пари з
моментом
(головного вектор) і однієї пари з
моментом
![]() (головного момента). При цьому головний
вектор не залежить від вибору центра
зведення О.
(головного момента). При цьому головний
вектор не залежить від вибору центра
зведення О.
Враховуючи формули
(1.7) і (1.38), знаходимо вирази для проекцій
головного вектора
![]() і головного момента
і головного момента
![]()
![]() . (1.46)
. (1.46)
![]() (1.47)
(1.47)
Розглянемо часткові випадки зведення просторової системи сил до найпростішого виду. При цьому можливі такі випадки:
1)
![]() .
Система сил зводиться до однієї пари,
момент якої обчислюється за формулою
(1.45), причому його величина не залежить
від вибору центра зведення.
.
Система сил зводиться до однієї пари,
момент якої обчислюється за формулою
(1.45), причому його величина не залежить
від вибору центра зведення.
2) якщо для даної
системи сил
![]() ,
то вона зводиться до рівнодійної
,
то вона зводиться до рівнодійної
![]() ,
яка проходить через центр О. її величина
визначається формулою (1.44).
,
яка проходить через центр О. її величина
визначається формулою (1.44).
3)
![]() ,
але
,
але
![]() .
У цьому випадку система сил зводиться
до рівнодійної
.
У цьому випадку система сил зводиться
до рівнодійної
![]() ,
яка не проходить через центр О.
,
яка не проходить через центр О.
Дійсно, при
![]() пара сил, що зображується вектором
пара сил, що зображується вектором
![]() ,
і сила
,
і сила
![]() діють в одній площині (мал. 1.44). сили пари
виберемо так, щоб одна з них дорівнювала
-
діють в одній площині (мал. 1.44). сили пари
виберемо так, щоб одна з них дорівнювала
-![]() ,
а положення іншої визначимо із
співвідношення
,
а положення іншої визначимо із
співвідношення
![]() .
.
 Відкинувши
зрівноважені сили
Відкинувши
зрівноважені сили
![]() і -
і -![]() ,
одержимо рівнодійну
,
одержимо рівнодійну
![]() ,
величина якої визначається формулою
(1.44).
,
величина якої визначається формулою
(1.44).
 4)
Нехай для заданої системи
4)
Нехай для заданої системи
![]() ,
причому вектор
,
причому вектор
![]() паралельний
паралельний
![]() (мал.45а). це означає, що система сил
зводиться до сили
(мал.45а). це означає, що система сил
зводиться до сили
![]() і пари
і пари
![]() ,
яка діє в площині, перпендикулярній
силі (мал. 45б). Така сукупність сили і
пари називається динамою, а пряма, вздовж
якої діє вектор
,
яка діє в площині, перпендикулярній
силі (мал. 45б). Така сукупність сили і
пари називається динамою, а пряма, вздовж
якої діє вектор
![]() — віссю динами. Дальше спрощення цієї
системи неможливе, бо, при перенесенні
пари сил, система залишається незмінною,
а при перенесенні сили з центра О в точку
С до момента
— віссю динами. Дальше спрощення цієї
системи неможливе, бо, при перенесенні
пари сил, система залишається незмінною,
а при перенесенні сили з центра О в точку
С до момента
![]() буде додаватися момент
буде додаватися момент
![]() ,
який перпендикулярний до вектора
,
який перпендикулярний до вектора
![]() ,
а отже, і до
,
а отже, і до
![]() .
В результаті момент
.
В результаті момент
![]() буде збільшуватися. Таким чином, задану
систему не можна звести до однієї сили
або до однієї пари. Вільне тіло під дією
динами буде здійснювати тільки складний
(гвинтовий) рух.
буде збільшуватися. Таким чином, задану
систему не можна звести до однієї сили
або до однієї пари. Вільне тіло під дією
динами буде здійснювати тільки складний
(гвинтовий) рух.
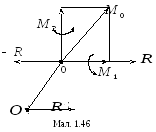
5) Якщо для заданої
системи
![]() ,
і при цьому вектори
,
і при цьому вектори
![]() і
і
![]() не перпендикулярні і не паралельні, то
така система зводиться до динами, вісь
якої не проходить через центр О. дійсно,
розклавши вектор
не перпендикулярні і не паралельні, то
така система зводиться до динами, вісь
якої не проходить через центр О. дійсно,
розклавши вектор
![]() на складові
на складові
![]() і
і
![]() ,
ми знаходимо систему
,
ми знаходимо систему
![]() ,
яку згідно випадку 3) можна замінити
силою
,
яку згідно випадку 3) можна замінити
силою
![]() ,
прикладеною в точці
,
прикладеною в точці
![]() .
Ця сила і пара з моментом
.
Ця сила і пара з моментом
![]() визначає динаму, вісь якої паралельна
силі
визначає динаму, вісь якої паралельна
силі
![]() і проходить через точку
і проходить через точку
![]() (мал. 1.46).
(мал. 1.46).
Таким чином, ми прийшли до такого висновку: якщо просторова система сил не перебуває в рівновазі, то вона може бути зведена до однієї сили (рівнодійної), або однієї пари, або динами.
 7.7.
Умови
рівноваги просторової системи сил.
Рівновага системи сил буде забезпечена,
якщо головний вектор
7.7.
Умови
рівноваги просторової системи сил.
Рівновага системи сил буде забезпечена,
якщо головний вектор
![]() і головний момент
і головний момент
![]() дорівнюють нулю. Так як останні
визначаються побудовою силового і
моментного многокутника, то геометричні
умови рівноваги системи сил можна
сформулювати так:
дорівнюють нулю. Так як останні
визначаються побудовою силового і
моментного многокутника, то геометричні
умови рівноваги системи сил можна
сформулювати так:
Для того, щоб просторова система сил перебувала у рівновазі, необхідно і достатньо, щоб силовий і моментний многокутники були замкнені.
Алгебраїчні умови
рівноваги дістанемо, проектуючи рівності
(1.44) і (1.45) при
![]() ,
на координатні осі.
,
на координатні осі.
![]() (1.48)
(1.48)
![]() (1.49)
(1.49)
Таким чином, для рівноваги довільної просторової системи сил необхідно і достатньо, щоб сума проекцій на координатні осі і суми їх моментів відносно цих осей дорівнювали нулю.
Рівності (1.48), (1.49) визначають розв’язок другої задачі статики для просторової системи сил. При цьому рівності (1.48) забезпечують відсутність переміщень твердого тіла вздовж координатних осей, а (1.49) — відсутність обертань відносно цих же осей.
Із умов рівноваги (1.48), (1.49) можна отримати відомі рівноваги для збіжної або плоскої системи сил. Для прикладу розглянемо випадок системи паралельних сил, що діють вздовж осі Z. Тоді проекції цих сил на осі х і у, а також їх моменти відносно осі дорівнюватимуть нулю, і умови рівноваги (1.48), (1.49) приймуть вид
![]() . (1.50)
. (1.50)
 7.8.
Теорема Варіньона.
Нехай на тверде тіло діє система сил
7.8.
Теорема Варіньона.
Нехай на тверде тіло діє система сил
![]() (мал. 1.47), яка зводиться до рівнодійної
(мал. 1.47), яка зводиться до рівнодійної
![]() ,
що проходить через точку О і визначається
рівністю
,
що проходить через точку О і визначається
рівністю
![]() (1.51)
(1.51)
Помножимо (1.51)
векторно зліва на вектор
![]()
![]()
Враховуючи (1.32), з попередньої рівності одержимо
![]() (1.52)
(1.52)
Ми довели теорему Варіньона: якщо система сил має рівнодійну, то момент цієї рівнодійної відносно будь-якої точки О1 дорівнює геометричній сумі моментів складових сил відносно цієї ж точки.
Проектуючи рівність (1.52) на координатні осі, ми отримаємо відповідні теореми про момент рівнодійної відносно координатних осей.
Приклад 4. Однорідна прямокутна плита вагою Р=300Н утримується у горизонтальному положенні сферичним шарніром А, петлею D і невагомою вірьовкою СЕ довжиною 1м (мал. 1.48). ВС=30 см, СD=40 см. Визначити реакції в’язей.
 Розв’язування.
Відкинемо в’язі А, D
і вірьовку СЕ, змінивши їх дію реакціями
Розв’язування.
Відкинемо в’язі А, D
і вірьовку СЕ, змінивши їх дію реакціями
![]() .
.
Запишемо умови рівноваги просторової системи сил
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() ;
; ![]() .
.
Визначаємо величини
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
Підставивши одержані значення в умови рівноваги, знаходимо
![]() ;
; ![]() ;
;
![]() ;
;
![]() ;
;
![]()
Оскільки всі результати додатні, то напрямки реакції на малюнку вказані правильно.