

§3. В’язі та їх реакції
Конструктивно в’язі можуть бути реалізовані у вигляді різного роду опор, шарнірних з’єднань, тяг. Вважаємо, що вони виготовлені із абсолютно твердих матеріалів і тертя в зонах їх контакту з розглядуваними тілами відсутнє.
Розглянемо найбільш характерні типи в’язей і їх реакцій.
1.Гладкий контакт двох поверхонь. Гладкою будемо називати поверхню, тертям об яку даного тіла можна знехтувати. Така поверхня не дозволяє тілу рухатись по спільному перпендикуляру в точці дотику. Тому реакція направлена так, як показано на мал. 1.7. До цього типу в’язей можна віднести так званий рухомий каток (мал.1.7).

Його реакція направлена перпендикулярно до опорної поверхні.
 2.Контакт
гладкої поверхні і двогранного кута.
Для такої в’язі реакція направлена по
перпендикуляру до гладкої поверхні
(мал. 1.9).
2.Контакт
гладкої поверхні і двогранного кута.
Для такої в’язі реакція направлена по
перпендикуляру до гладкої поверхні
(мал. 1.9).
3.Циліндричний
шарнір
(підшипник). Розглянемо з’єднання
циліндричного болта і тіла, що має
циліндричний отвір, діаметр якого дещо
більший діаметра болта (мал. 1.10). таке
з’єднання називається циліндричним
шарніром або підшипником. Оскільки тіло
АВ може лише обертатися навколо тіла
болта, то реакція
![]() такого шарніра діє в площині,
перпендикулярній осі обертання, і
проходить через центр О. Циліндричним
можна вважати і нерухому опору (мал.
1.11).
такого шарніра діє в площині,
перпендикулярній осі обертання, і
проходить через центр О. Циліндричним
можна вважати і нерухому опору (мал.
1.11).
4.Сферичний шарнір. Цей вид в’язі закріплює певну точку тіла так, що вона не може здійснювати жодних лінійних переміщень в просторі. Реакція сферичного шарніра проходить через його центр і мож мати довільний напрямок у просторі (мал. 1.12).
5.Двошарнірне стержневе з’днання. Нехай в деякій конструкції в’ззю є стержень АВ, закріплений на кінцях шарнірами А, В (мал. 1.13). якщо на стержень не діють зовнішні сили, то реакція направлена вздовж його осі. Цей висновок зроблено на основі аксіоми 1.
6.Гнучка
в’язь (нитка, канат, ланцюг).
Реакція
![]() називається
натягом. Вона прикладена в точці
прикріплення до тіла і направлена вздовж
нитки всередину її. На мал. 1.14
називається
натягом. Вона прикладена в точці
прикріплення до тіла і направлена вздовж
нитки всередину її. На мал. 1.14
![]() ,
,![]() — натяги ниток.
— натяги ниток.
7.Жорстке защімлення. Балка АВ одним кінцем замурована в стіні, а інший кінець вільний (мал. 1.15). В даному прикладі реакція защемлення

складається із
сили
![]() і пари сил з моментом mA.
Визначення реакцій в’язей має важливе
практичне значення, бо знаючи їх, ми,
згідно аксіоми 4, будемо знати і силу
тиску на в’язі, тобто ті вихідні дані,
які необхідні для розрахунку міцності
відповідних частин конструкції.
і пари сил з моментом mA.
Визначення реакцій в’язей має важливе
практичне значення, бо знаючи їх, ми,
згідно аксіоми 4, будемо знати і силу
тиску на в’язі, тобто ті вихідні дані,
які необхідні для розрахунку міцності
відповідних частин конструкції.
§4. Система збіжних сил
4.1. Додавання збіжних сил. Система сил називається збіжною, якщо лінії їх дії перетинаються в одній точці, яка називається центром. Оскільки силу можна переносити вздовж лінії її дії, то система збіжних сил еквівалентна системі сил, прикладених в центрі.
Розглянемо першу і другу задачі статики для системи збіжних сил.
Заміну даних
системи сил, прикладених в одній точці,
рівнодійною можна провести шляхом
послідовного застосування аксіоми
паралелограма. Операцію додавання сил
можна виконати, не будуючи кожен раз
паралелограм сил, достатньо в кінці В
вектора
![]() прикласти початок вектора
прикласти початок вектора
![]() ,
потім до кінця С вектора
,
потім до кінця С вектора
![]() — початок вектора
— початок вектора
![]() і т.д. Сполучивши центр А з кінцем
останньої сили, одержимо рівнодійну
і т.д. Сполучивши центр А з кінцем
останньої сили, одержимо рівнодійну
![]() (мал. 1.16). Описаний вище спосіб знаходження
рівнодійної збіжної системи сил
називається правилом многокутника,
ламана ABCDE — силовим многокутником, а
відрізок АЕ — замикальною стороною
многокутника.
(мал. 1.16). Описаний вище спосіб знаходження
рівнодійної збіжної системи сил
називається правилом многокутника,
ламана ABCDE — силовим многокутником, а
відрізок АЕ — замикальною стороною
многокутника.
 Якщо
в точці О задано n збіжних сил
Якщо
в точці О задано n збіжних сил
![]() ,
,![]() ,….
,….
![]() ,
то їх рівнодійна
,
то їх рівнодійна
![]() прикладена в цій же точці і дорівнює
геометричній сумі векторів заданих сил
прикладена в цій же точці і дорівнює
геометричній сумі векторів заданих сил
![]() (1.3)
(1.3)
Таким чином, розв’язок першої задачі статики може бути сформульований так: довільна збіжна система сил може бути зведена до рівнодійної, яка визначається з рівності (1.3).
4.2 Розкладання сил. Розкласти дану силу на складові — означає знайти таку систему сил, для яких задана сила буде рівнодійною. Ця задача невизначена і має єдиний розв’язок лише при заданні додаткових умов. Розглянемо два найбільш важливі окремі випадки.
1. Розкладання сили по двох заданих не колінеарних напрямках.
Р озкладемо
задану силу
озкладемо
задану силу
![]() (мал.
1.17) по напрямках паралельних прямих АВ
і АD. Задача зводиться до побудови
паралелограма з діагоналлю
(мал.
1.17) по напрямках паралельних прямих АВ
і АD. Задача зводиться до побудови
паралелограма з діагоналлю
![]() і сторонами, паралельними прямим АВ і
АD. Для розв’язку задачі проводимо через
точки А, С прямі, паралельні АВ і АD. Сили
і сторонами, паралельними прямим АВ і
АD. Для розв’язку задачі проводимо через
точки А, С прямі, паралельні АВ і АD. Сили
![]() і
і
![]() будуть шуканими складовими.
будуть шуканими складовими.
 2.
Розкладання сили по трьох не компліментарних
напрямках. Якщо задані напрямки не
лежать в одній площині, то задача
визначена і зводиться до побудови такого
паралелепіпеда, у якого діагональ
зображує силу
2.
Розкладання сили по трьох не компліментарних
напрямках. Якщо задані напрямки не
лежать в одній площині, то задача
визначена і зводиться до побудови такого
паралелепіпеда, у якого діагональ
зображує силу
![]() ,
а ребра паралельні заданим напрямкам
(мал. 1.18). зауважимо, що розв’язки
приведених вище двох задач відповідають
теоремам шкільного курсу геометрії про
розклад вектора на площині по двох не
колінеарних і в просторі по трьох не
компліментарних векторах.
,
а ребра паралельні заданим напрямкам
(мал. 1.18). зауважимо, що розв’язки
приведених вище двох задач відповідають
теоремам шкільного курсу геометрії про
розклад вектора на площині по двох не
колінеарних і в просторі по трьох не
компліментарних векторах.
4.3 Проекція
сили на вісь і площину.
Розглянемо вісь l
і силу![]() ,
що визначається точками А,В (мал. 1.19).
введемо такі означення:
,
що визначається точками А,В (мал. 1.19).
введемо такі означення:
 1.
Геометричною
проекцією сили
1.
Геометричною
проекцією сили
![]() на вісь l
будемо
називати вектор
на вісь l
будемо
називати вектор
![]() ,
точки якого визначаються як ортогональні
проекції точок А, В на вісь l
,
точки якого визначаються як ортогональні
проекції точок А, В на вісь l
![]() (1.4)
(1.4)
2. Алгебраїчною
проекцією
сили
![]() на
вісь l
називається число зі знаком, яке
визначається рівністю
на
вісь l
називається число зі знаком, яке
визначається рівністю
![]() (1.5)
(1.5)
Знак «+» вибираємо
тоді, коли вектор
![]() спів напрямлений з віссю l
(
спів напрямлений з віссю l
(![]() ).
По величині проекція сили на вісь
дорівнює добутку величини сили
).
По величині проекція сили на вісь
дорівнює добутку величини сили
![]() на косинус кута між силою і додатнім
напрямком осі l
на косинус кута між силою і додатнім
напрямком осі l
![]() (1.6)
(1.6)
При цьому проекція сили буде додатною, якщо відповідний кут гострий, і від’ємною, якщо цей кут — тупий.
 Зауважимо,
що при подальшому викладі матеріалу
під терміном «проекція сили на вісь»
будемо розуміти алгебраїчну проекцію.
Зауважимо,
що при подальшому викладі матеріалу
під терміном «проекція сили на вісь»
будемо розуміти алгебраїчну проекцію.
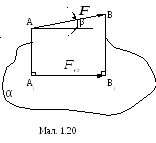
3. Проекція
сили на площину. Розглянемо
силу
![]() і площину α (мал. 1.20). спроектуємо точки
А, В, що визначають силу
і площину α (мал. 1.20). спроектуємо точки
А, В, що визначають силу
![]() ,
ортогонально на площину α
,
ортогонально на площину α
![]()
Величина проекції
обчислюється за формулою
![]() ,
де β — кут між силою
,
де β — кут між силою
![]() і площиною α.
і площиною α.
В деяких випадках для знаходження проекції сили на вісь буває зручніше знайти спочатку її проекцію на площину, в якій дана вісь розміщена, а потім знайдений вектор спроектувати на задану вісь. Такий метод носить назву подвійного проектування сили на вісь.
Для ефективного розв’язку другої задачі статики розглянемо без доведення основні властивості проекцій вектора на вісь: а) рівні вектори мають рівні проекції; б) проекція геометричної сум векторів на деяку вісь дорівнює алгебраїчній сумі проекцій складових на цю вісь.
Доведення цих тверджень проводиться у курсі вищої математики (розділ «Векторна алгебра»).
4.4. Умови
рівноваги системи збіжних сил.
Оскільки система збіжних сил зводиться
до однієї сили /рівнодійної/, то її
рівновага можлива лише у випадку
![]() .
Так як рівнодійна
.
Так як рівнодійна
![]() визначається як замикальна сторона
силового многокутника, то у випадку
рівноваги він повинен бути замкненим.
визначається як замикальна сторона
силового многокутника, то у випадку
рівноваги він повинен бути замкненим.
Отже, для рівноваги системи збіжних сил необхідно і достатньо, щоб силовий многокутник, побудований з цих сил, був замкнений. Останнє твердження виражає собою геометричну умову рівноваги.
Для встановлення алгебраїчних умов рівноваги виберемо просторову систему координат Оxyz, відносно якої задані сили характеризуються такими проекціями
![]() причому
причому
![]() (1.7)
(1.7)
Прирівнюючи до нуля проекції рівнодійної, дістанемо
![]() (1.8)
(1.8)
Рівності (1.8) виражають умови рівноваги в алгебраїчній формі: для рівноваги просторової системи збіжних сил необхідно і достатньо, щоб суми проекцій цих сил на кожну із координатних осей дорівнювали нулю.
У випадку абсолютної рівноваги тіла (спокою) умови (1.8) забезпечують відсутність переміщення тіла в напрямках координатних осей. Якщо всі сили діють в одній площині (плоска система сил), то умови рівноваги (1.8) приймають вид
![]() (1.9)
(1.9)
Геометрична умова рівноваги або рівності (1.8) являють собою розв’язок другої задачі статики для системи збіжних сил.
Схема розв’язування задач статики
-
Вибираємо тіло (основний об’єкт), рівновага якого буде розглядатися. Якщо задані сили діють на одне тіло, а шукані на інше, то може виникнути необхідність розглянути послідовно рівновагу кожного тіла окремо
-
Звільняємо тіло від в’язей, замінюючи їх дію невідомими реакціями. Зображуємо всі діючі на тіло задані сили і сили реакцій. При цьому тіло, звільнене від в’язей, слід зобразити окремо.
-
Складаємо умови рівноваги. Вид цих умов залежить від виду системи сил, що діє на розглядуване тіло після його звільнення від в’язей, і який метод (графічний чи аналітичний) застосовується.
-
Визначаємо шукані величини, перевіряємо правильність розв’язку і досліджуємо здобуті результати.
П риклад
1. Балка АВ
одним кінцем А закріплена на нерухомій
опорі циліндричним шарніром, а другим
кінцем В покладена на рухомий каток
(мал. 1.21). в точці D прикладена сила
риклад
1. Балка АВ
одним кінцем А закріплена на нерухомій
опорі циліндричним шарніром, а другим
кінцем В покладена на рухомий каток
(мал. 1.21). в точці D прикладена сила
![]() .
Визначити реакції опор в точках А і В.
.
Визначити реакції опор в точках А і В.
Розв’язування.
Основним тілом, рівновага якого буде
розглядатися, є балка АВ. Звільняємо її
від в’язей А, В. реакція в опорі В
направлена вертикально, а в опорі А —
напрямок реакції невідомий. Для його
знаходження використаємо теорему про
три сили. Реакція
![]() направлена вздовж прямої AS. Для визначення
кута α розглянемо прямокутний трикутник
DBS
направлена вздовж прямої AS. Для визначення
кута α розглянемо прямокутний трикутник
DBS
DS=DB/cos60º=2DB.
Отже, ∆ASD — рівнобедрений (AD=DS).
 Геометричний
метод. Умови
рівноваги сил
Геометричний
метод. Умови
рівноваги сил
![]() ,
,
![]() ,
,
![]() запишемо у вигляді
запишемо у вигляді
![]() +
+![]() +
+![]() =0.
=0.
Побудуємо замкнений
трикутник (мал. 1.22) сил, вибираючи для
них певний масштаб. З цього трикутника
знаходимо
![]() =
=![]() =
=![]() .
.
Аналітичний метод. Складаємо умови рівноваги плоскої системи збіжних сил.
![]()
![]()
Покладаємо α=30º.
Відповідь:
![]() =
=![]() =
=![]() .
.