

Міністерство освіти і науки України
Рівненський державний гуманітарний університет
Сяський А.О., Семенюк М.В.
ТЕХНІЧНА МЕХАНІКА
(Кінематика)
Навчальний посібник
Р івне
– 2009
івне
– 2009
Міністерство освіти і науки України
Рівненський державний гуманітарний університет
Сяський А.О., Семенюк М.В.
ТЕХНІЧНА МЕХАНІКА
(Кінематика)
Навчальний посібник для студентів
спеціальності «Технологічна освіта»
фізико-технологічного факультету
Р івне
– 2009
івне
– 2009
Сяський А.О., Семенюк М.В. Технічна механіка (кінематика). Навчальний посібник для студентів спеціальності «Технологічна освіта» фізико-технологічного факультету. – Рівне: Ред.-видав. відділ РДГУ, 2009. – 100 с.
Затверджено до друку кафедрою загальнотехнічних дисциплін і технологій РДГУ
(протокол № від травня 2009 р.).
Друкується за рішенням Нуково-методичної ради РДГУ
(протокол № від 2009 р.).
Рецензенти:
Швабюк В.І., д. т. н., проф., проректор з наукової роботи Луцького національного технічного університету;
Юсенко А.С., к. т. н., доц., завідувач кафедри РДГУ;
Кундрат М.М., д. т. н., проф. кафедри обчислювальної математики НУВГП.
В ідповідальний
за випуск: Сяський А.О., д. т. н., проф.,
завідувач кафедри інформатики та
прикладної математики.
ідповідальний
за випуск: Сяський А.О., д. т. н., проф.,
завідувач кафедри інформатики та
прикладної математики.
ЗМІСТ
ЧАСТИНА ДРУГА. КІНЕМАТИКА 4
ВСТУП ДО КІНЕМАТИКИ 4
РОЗДІЛ 3. КІНЕМАТИКА МАТЕРІАЛЬНОЇ ТОЧКИ 5
3.1. Способи задання руху точки 5
3.2. Кінематичні характеристики руху точки 6
3.3. Окремі випадки руху точки 10
3.4. Задачі до розділу 3 11
РОЗДІЛ 4. КІНЕМАТИКА АБСОЛЮТНО ТВЕРДОГО ТІЛА 16
4.1. Найпростіші рухи твердого тіла 16
4.2. Плоскопаралельний рух твердого тіла 22
4.3. Задачі до розділу 4 29
РОЗДІЛ 5. КІНЕМАТИКА СКЛАДНОГО РУХУ МАТЕРІАЛЬНОЇ ТОЧКИ І АБСОЛЮТНО ТВЕРДОГО ТІЛА 35
5.1. Складний рух матеріальної точки 35
5.2. Складний рух твердого тіла 37
5.3. Задачі до розділу 5 42
РОЗДІЛ 6. КІНЕМАТИКА МЕХАНІЗМІВ 49
6.1. Структурний аналіз механізмів та їх класифікація 50
6.2. Кінематичний аналіз плоских важільних механізмів другого порядку однократної рухомості з нижчими кінематичними парами 64
6.3. Кінематичний аналіз плоских механізмів методом графічного диференціювання (кінематичних діаграм). 75
6.3. Механізми для передачі обертального руху 81
6.5. Механізми для передачі обертального руху з гнучкими ланками 88
6.6. Плоскі кулачкові механізми 91
6.7. Кінематичний синтез кулачкових механізмів 98


Частина друга. Кінематика вступ до кінематики
Предметом теоретичної механіки є механічний рух і рівновага матеріальних тіл. Механічний рух є переміщення одного тіла відносно інших тіл. Він визначає найпростішу форму руху матеріального світу серед багатьох інших.
Рух – це форма існування матеріального світу. Механічний рух є одним із наслідків взаємодії матеріальних тіл.
В розділі кінематика вивчаються геометричні властивості механічного руху матеріальних тіл, тобто без врахування взаємодій, які його визначають. Кінематика вивчає зміну положення матеріальних тіл з плином часу.
Причина механічного руху полягає в неперервній зміні розмаїття матеріального світу. Всі механічні рухи відбуваються в просторі і часі. Простір і час невіддільні від руху матеріальних тіл – вони є формою існування матеріального світу.
В курсі механіки розглядається тривимірний простір, який наділений властивостями однорідності, ізотропності і неперервності. Для вимірювання протяжності простору в міжнародній системі одиниць СІ використовується один метр (м).
Час в класичній механіці вважається універсальним для всіх точок простору. Він неперервний і незворотній. За одиницю виміру часу вибирається сонячна секунда (с).
В задачах
кінематики час
![]() приймають за незалежну змінну (аргумент).
Всі інші кінематичні характеристики
розглядаються змінними (функціями часу
приймають за незалежну змінну (аргумент).
Всі інші кінематичні характеристики
розглядаються змінними (функціями часу
![]() ).
).
Відлік
часу проводиться від деякого початкового
моменту (![]() =0),
про вибір якого в кожному конкретному
випадку домовляються. Кожен заданий
момент часу
=0),
про вибір якого в кожному конкретному
випадку домовляються. Кожен заданий
момент часу
![]() визначається числом секунд, які минули
від початкового моменту до заданого.
Різниця між двома деякими послідовними
моментами часу називається проміжком
часу.
визначається числом секунд, які минули
від початкового моменту до заданого.
Різниця між двома деякими послідовними
моментами часу називається проміжком
часу.
Для визначення положення рухомого об’єкта з тілом, по відношенню до якого вивчається рух, зв’язують певну систему координат, яка разом з цим тілом визначає систему відліку.
Задати рух або закон руху матеріального об’єкта означає задати положення цього об’єкта відносно вибраної системи відліку в кожен момент часу.
Встановлення математичних способів задання руху матеріальних об’єктів є однією з важливих задач кінематики. Тому вивчення руху довільного об’єкта необхідно розпочинати із встановлення способів задання цього руху .
Основна задача кінематики полягає в тому, щоб знаючи закон руху даного тіла, визначити всі кінематичні величини, які характеризують як рух тіла в цілому, так і рух кожної з його точок зокрема.
![]()
Розділ 3. Кінематика матеріальної точки
3.1. Способи задання руху точки
О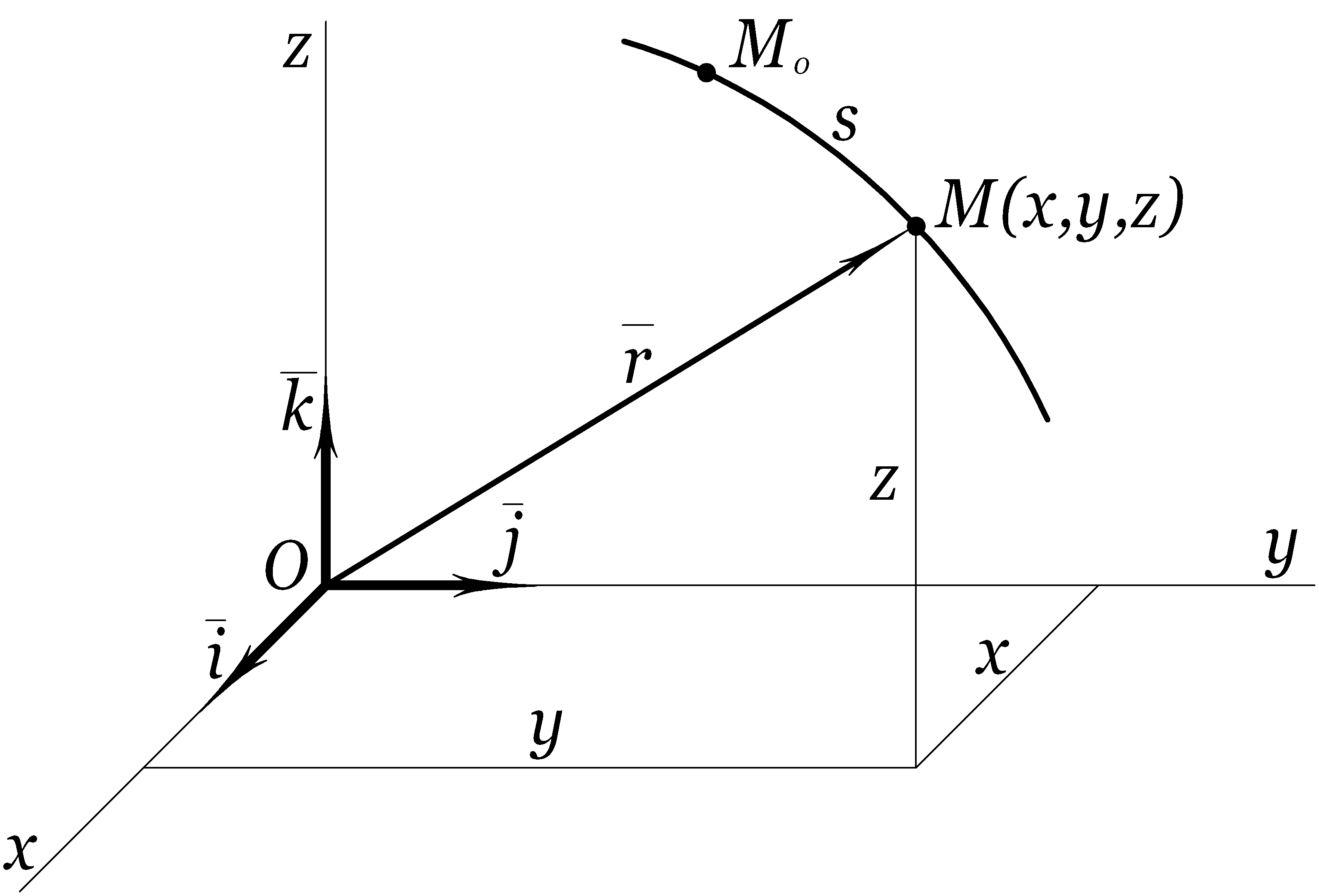 сновним
об’єктом вивчення у даному розділі є
матеріальна точка, яку будемо ототожнювати
з геометричною точкою. Це означає, що
її положення відносно вибраної системи
відліку характеризується впорядкованою
трійкою чисел (
сновним
об’єктом вивчення у даному розділі є
матеріальна точка, яку будемо ототожнювати
з геометричною точкою. Це означає, що
її положення відносно вибраної системи
відліку характеризується впорядкованою
трійкою чисел (![]() ),
які називаються координатами точки.
Означенни матеріальної точки наведено
в розділі 1.
),
які називаються координатами точки.
Означенни матеріальної точки наведено
в розділі 1.
За
систему відліку оберемо прямокутну
декартову систему координат з центром
в точці
![]() і одиничними базисними векторами
і одиничними базисними векторами
![]() (рис.
3.1).
(рис.
3.1).
П
Рис. 3.1. Просторова
система координат Рис.
1
(3.1)![]() відносно
системи відліку буде задано, якщо в
кожен момент часу будуть відомі її
координати
відносно
системи відліку буде задано, якщо в
кожен момент часу будуть відомі її
координати
![]() .
З плином часу положення точки
.
З плином часу положення точки
![]() буде
змінюватися, а тому будуть змінюватися
її координати
буде
змінюватися, а тому будуть змінюватися
її координати
![]()
Оскільки
рух матеріальної точки неперервний, то
повинні бути неперервними функції
![]() .
Співвідношення (3.1) дозволяють в кожний
момент часу визначити трійку чисел (
.
Співвідношення (3.1) дозволяють в кожний
момент часу визначити трійку чисел (![]() )
і однозначно встановити положення точки
)
і однозначно встановити положення точки
![]() відносно
вибраної системи відліку.
відносно
вибраної системи відліку.
Спосіб задання руху точки у вигляді (3.1) називається координатним.
Якщо
співвідношення (3.1) помножити відповідно
на базисні вектори
![]() ,
то в результаті їх додавання одержимо
,
то в результаті їх додавання одержимо
![]()
Ввівши позначення
![]() ;
; ![]() ,
,
останню рівність перепишемо так
(3.2)![]()
Вектор
![]() називається радіус-вектором точки
називається радіус-вектором точки
![]() .
Спосіб задання руху точки векторним
рівнянням (3.2) називається векторним.
Оскільки (3.1) є координатним записом
(3.2), то координатний і векторний способи
задання руху матеріальної точки
еквівалентні.
.
Спосіб задання руху точки векторним
рівнянням (3.2) називається векторним.
Оскільки (3.1) є координатним записом
(3.2), то координатний і векторний способи
задання руху матеріальної точки
еквівалентні.
В процесі
руху матеріальна точка описує в просторі
певну неперервну лінію, яка називається
траєкторією даної точки. Траєкторія –
геометрична лінія, яка не залежить від
часу. Тому для її визначення із рівнянь
руху (3.1) або (3.2) необхідно виключити час
![]() .
.
Д
(3.3)![]() і підставимо в решту рівнянь
і підставимо в решту рівнянь
![]()
![]()
Перше
з рівнянь (3.3) визначає циліндричну
поверхню твірні якої паралельні осі
![]() ,
а інше – циліндричну поверхню з твірними,
паралельними осі
,
а інше – циліндричну поверхню з твірними,
паралельними осі
![]() .
Лінія перетину цих твірних поверхонь
визначає траєкторію руху точки (рис.
3.2).
.
Лінія перетину цих твірних поверхонь
визначає траєкторію руху точки (рис.
3.2).
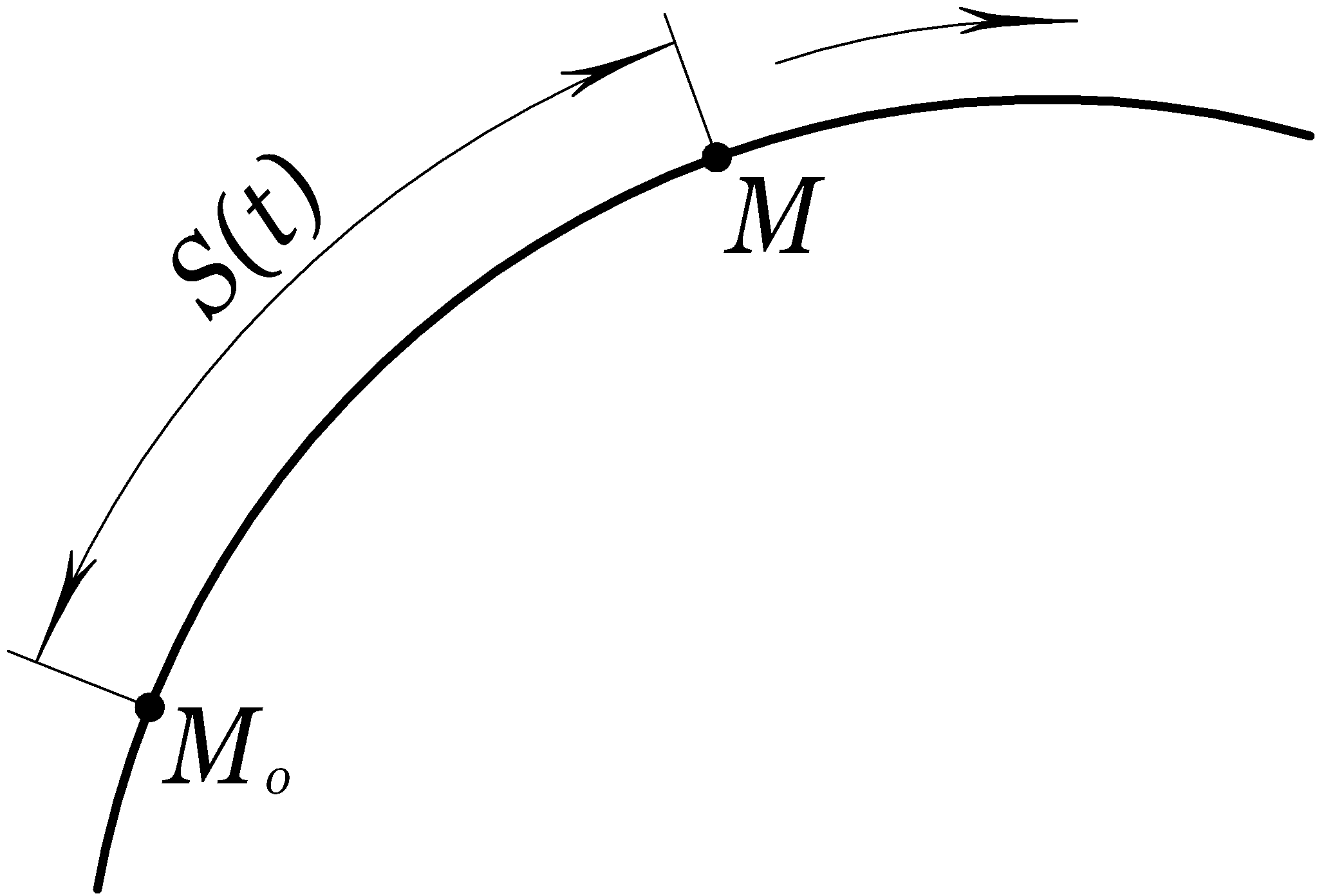
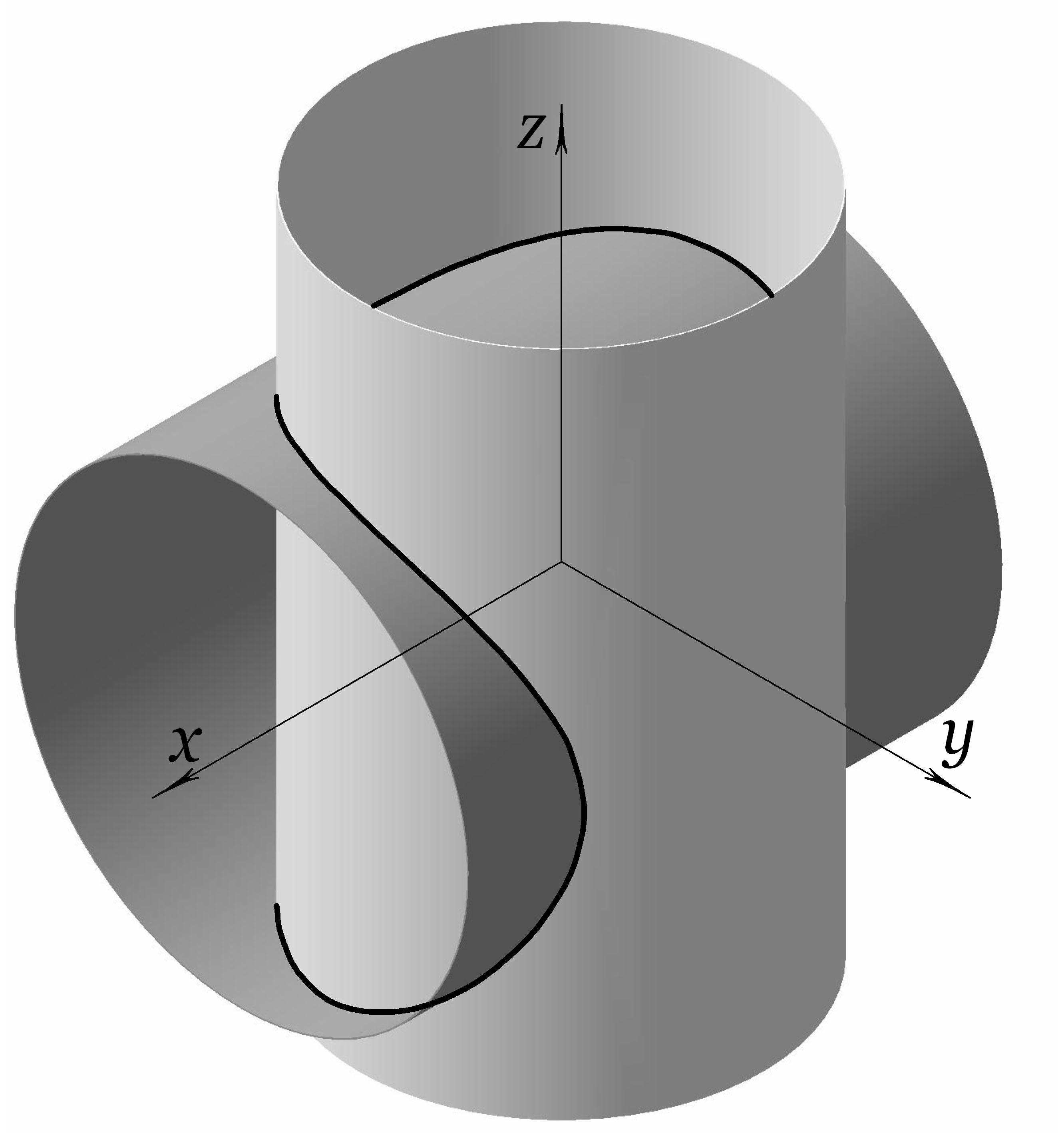
Рис. 3.2. Траєкторія точки в просторі Рис. 3.3. До натурального способу задання руху точки
У![]() випадку, коли траєкторія руху відома,
для задання руху точки зручно користуватися
натуральним способом. При цьому повинно
бути задано: траєкторію руху точки;
початкову точку відліку на траєкторії
(станцію відправлення); додатний напрямок
руху точки вздовж траєкторії; одиницю
виміру довжин; закон руху точки вздовж
траєкторії
випадку, коли траєкторія руху відома,
для задання руху точки зручно користуватися
натуральним способом. При цьому повинно
бути задано: траєкторію руху точки;
початкову точку відліку на траєкторії
(станцію відправлення); додатний напрямок
руху точки вздовж траєкторії; одиницю
виміру довжин; закон руху точки вздовж
траєкторії
![]() .
Тут
.
Тут
![]() відстань по дузі між точками
відстань по дузі між точками
![]() і
і
![]() з
відповідним знаком (рис. 3.3).
з
відповідним знаком (рис. 3.3).
Я
(3.4)![]() та
та
![]() ,
то рівняння руху матеріальної точки
при натуральному способі задання мають
вигляд:
,
то рівняння руху матеріальної точки
при натуральному способі задання мають
вигляд:
![]() ;
;
![]() ;
;
![]()
Матеріальна точка в просторі має три ступені вільності (може здійснювати три незалежні рухи), тому при довільному способі задання руху число рівнянь руху дорівнює трьом.