

14.3. Орбітальний рух супутників. Ефемериди
Під незбуреним (кеплеровим) рухом супутника розуміють його рух під впливом тільки сили притягання Землі. У відповідності із другим законом Ньютона рух центра мас супутника в інерціної системі координат X0Y0Z0 описується рівнянням:
![]()
де F - вектор сили притягання Землі, m - маса супутника, g - вектор доцентрового прискорення, або
![]()
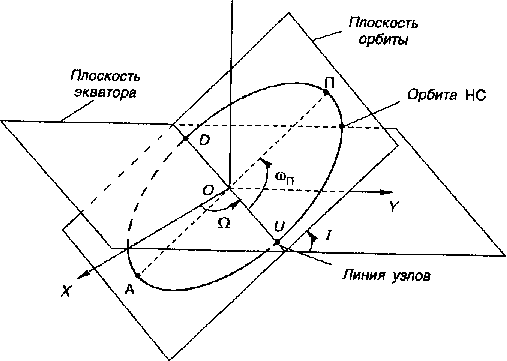
Рис. 14.10. Орієнтація орбітальної площини
де k =6,672◦10-11 м3/кгс2 - універсальна гравітаційна постійна; M = 5,974242 ◦ 1024 кг - маса Землі; r - відстань від центру Землі до супутника; μ=kM=3,9860044 м3/c2 – геоцентрична гравітаційна постійна Земля.
Відповідно до першого закону Кеплера, будь-яка траєкторія супутника, що рухається в поле тяжіння Землі, лежить у нерухомій площині, так називаної орбітальної площини, що проходить через центр тяжіння, і являє собою криву другого порядку, в одному з фокусів якої перебуває центр притягання.
Орієнтацію орбітальної площини характеризують її положенням щодо екваторіальної площини ХОY (рис. 14.10). Лінію перетинання цих площин називають лінією вузлів. Вузлами орбіти супутника є точки перетинання орбіти з екваторіальною площиною. Вузол U, що відповідає руху супутника з південної небесної півсфери в північну називають висхідної, а вузол D, що відповідає руху з північної небесної півсфери в південну - спадної.
Положення площини орбіти супутника щодо екваторіальної площини визначають два орбітальних елементи — довгота висхідного вузла Ω и нахилення орбіти i. Кут Ω відраховує в екваторіальній площині від осі X до лінії вузлів і може змінюватися в межах від 0° до 180°. При i=90° орбіта називається полярної, при i=0° — екваторіальної, в інших випадках — похилої.
Рівняння орбіти супутника в орбітальній площині в полярнiй системі координат (r0, v) із центром, що збігається із центром Землі, має вигляд:
P
r = ------------------,
1+e cos(v-v0)
де Р - фокальний параметр, е - ексцентриситет, v0 - кут між позитивним напрямком полярної осі й фокальною віссю.
На рис. 14.11 наведена еліптична орбіта супутника. В одному з фокусів еліпса перебуває Земля. Пряму лінію, що проходить через фокуси еліпса, називають лінією апсид. Точки перетинання цієї лінії з еліпсом називають апсидами. Точку, найближчу до Землі, називають перицентром або перигеєм (П), а вилучену - апоцентром або апогеєм (А). Орієнтація орбіти в орбітальній площині характеризується кутом перигею (аргументом) і»п між напрямком на перигей і лінією вузлів.
Розміри орбіти супутників характеризуються наступними параметрами:
велика піввісь еліпса:
Р
а = -------------,
1 - е2
лінійний ексцентриситет:
d = a·e
Якщо супутник рухається строго відповідно до законів Кеплера (при відсутності впливів, що обурюють), то п'ять параметрів орбіти Ω, i, wп, р, е постійні й не міняються при русі супутника, а шостий параметр v (щира аномалія) характеризує положення супутника на орбіті в кожен фіксований момент часу tk. Час tk, що характеризує знаходження супутника в конкретній точці орбіти, називається епохою.
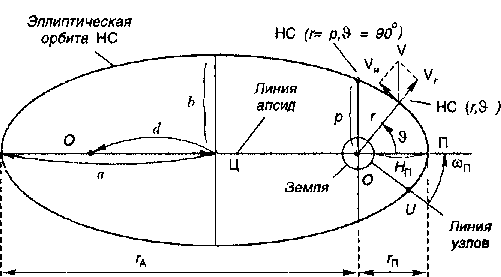
Рис. 14.11. Еліптична орбіта супутника
Час знаходження супутника в якій-небудь характерній точці орбіти має власну назва, наприклад, час перигею tп.
У зв'язку з тим, що генератори частоти, установлені на кожному супутнику, мають деякі погрішності, то показання годин на супутнику відрізняється від часу GPS З метою приведення часу супутника в систему часу GPS необхідно обчислити й увести виправлення в годинники супутника, використовуючи поліноміальні коефіцієнти, які передаються в супутниковому повідомленні. Час супутника виправляють на величину ∆t3:
t = t3 - ∆t3,
де ∆t3 = a0 + a1 (t – toc) + a2(t – toc)
Обчислюють проміжок часу від опорної епохи до моменту даного виміру:
tk = t – toc
У подальших розрахунках будуть потрібні наступні константи:
ωe = 7,2921151467◦10-3 рад/c - кутова iнерцiйна швидкість обертання Землі;
μ = 3986005◦108 м3/с2 - гравітаційний параметр Землі;
π = 3,1415926535898 - точне значення числа .
Середній рух на момент toc обчислюється за формулою:
![]()
а скоректований середній рух дорівнює:
![]()
Середня аномалія обчислюється за формулою:
![]()
а ексцентричну аномалію на момент випромінювання сигналу знаходять, використовуючи рівняння Кеплера:
![]()
Це завдання вирішується ітераціями, скориставшись тим, що ексцентриситет орбіт супутника малі (е≤0,001), у першому наближенні приймають:
![]()
а потім уточнюють за формулою:
![]()
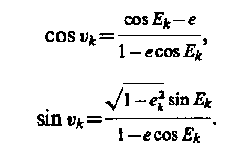
потім обчислюють істинну аномалію по формулах:
Наближення до аргументу широти дорівнює:
![]()
У зв'язку з тим, що супутник рухається по збуреній орбіті, у зв'язку з нерівномірним розподілом мас у тілі Землі, сонячним тиском Сонця на супутник й ін., у навігаційному повідомлені супутника, крім шести параметрів Кеплера, утримується 9 коригувальних виправлень.
Коригувальне
виправлення до аргументу широти
обчислюють за формулою:
![]()
Аргумент широти на момент випромінювання дорівнює:
![]()
Коригувальне виправлення до радіуса-вектора обчислюють за
формулою:![]()
Радіус-вектор на момент tk обчислюють за формулою:
![]()
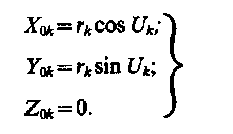
Знайдені величини rk й Еk дозволяють обчислити координати супутника в площині оскулiруючої орбіти:
Корекцію за нахил орбіти до площини екватора обчислюють за формулою:
![]()
а нахил орбіти до площини екватора дорівнює:
![]()
Довготу вузла на момент tk обчислюють за формулою:
![]()
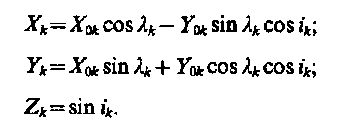
Координати супутника в системі координат WGS-84 можуть бути отримані але наступні формули:
Під ефемеридами супутників розуміють прогнозовані координати положення супутників на момент часу, що цікавить споживача. Стосовно до супутникових навігаційних систем ефемериди супутників складаються із двох частин:
- математичної моделі руху супутників, що опублікована в науковій літературі;
- параметрів математичної моделі, які передаються в навігаційному повідомленні супутника.
Оскільки описати з високою точністю реальний рух супутників не вдається навіть при наявності настільки значної кількості коефіцієнтів, те прогнозовану орбіту супутника розбивають на інтервали тривалістю 1 ч. Щогодини в навігаційному повідомленні обновляються всі параметри й коригувальні коефіцієнти.