

Алгоритм измерения расстояния
Блок-схема алгоритма измерения расстояния приведена на рисунке (Рисунок 37)

Рисунок 37 – Алгоритм измерения расстояния
Инициализация работы ВЦП подразумевает отправку на GP22 по интерфейсуSPIкоманды «01110000». Эта команда запускает блок измерения. После чего происходит запуск лазера и ожидание прерывания поSPI. Если прерывание сработало значит ВЦП получил стоповый сигнал и данные можно считать отправив команду «10110000» с последующими 16 тактами. Данные приходят в двоичном системе счисления и после переводятся в десятичную. Данные представляю собой число вентилей, которые прошел сигнал, каждый вентиль сигнал проходит за 90 пс. Результат умножается на 90 пс и вычисляется время полета лазерного импульса. После чего, так как получившееся время включает в себя полет и туда и обратно, оно делится на 2. Результат умножается на скорость света и определяется расстояние.
Алгоритм сканирования и построения изображения
Блок – схема алгоритма сканирования приведена на рисунке (Рисунок 38).
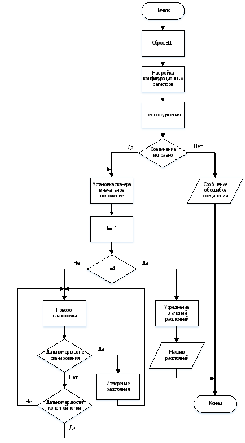
Рисунок 38 – Алгоритм сканирования
В начале работы производится сброс
микросхемы GP-22. Это делается
для того чтобы очистить регистр результата
и избежать ошибочного первого измерения.
После сброса производится настройка
конфигурационных регистров ВЦП, они
определяют режим работы микросхемы,
таблицы значений каждого бита регистров
приведена в приложении (ПРИЛОЖЕНИЕ А).
Для теста соединения на ВЦП отправляется
команда «10110101» и ожидается ответ.
Соединение исправно если в ответ
контроллер получает «00011001». После чего
происходит установка сканера в начальное
положение, которое определяется
срабатыванием концевого датчика. Далее
производится 4 цикла сканирования,
результаты которых усредняются для
повышения точности в 2 раза ( ),
и усредненные значения передаются
пользователю по интерфейсуUART.
Программная реализация алгоритма
сканирования приведена в приложении
(ПРИЛОЖЕНИЕ Б, Листинг 1).
),
и усредненные значения передаются
пользователю по интерфейсуUART.
Программная реализация алгоритма
сканирования приведена в приложении
(ПРИЛОЖЕНИЕ Б, Листинг 1).
Полученные при сканировании расстояния используются для построения изображения в среде Matlab. Блок-схема алгоритма построения изображения приведена на рисунке (Рисунок 39).
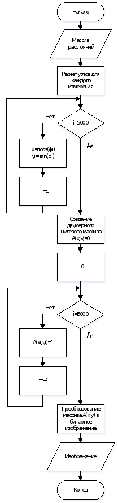
Рисунок 39 – Алгоритм построения изображения
Входными данными для построения
изображения является массив расстояний
измеренных при сканировании. Расчет
углов для каждого измерения подразумевает
создание одномерного массива включающего
в себя углы из промежутка
 с шагом
с шагом .
После расчета углов, данные полученные
при сканировании переводятся в декартовую
систему координат при помощи выражений:
.
После расчета углов, данные полученные
при сканировании переводятся в декартовую
систему координат при помощи выражений:
 (25)
(25)
где ri–i-ое измерение из массива
расстояний, αi–
соответствующий угол из массива углов,m– размерность матрицы
изображения ( необходимо для смещения центра системы
координат).
необходимо для смещения центра системы
координат).
Значения xиyокругляются до целого, это делается для того чтобы при построении изображения каждому значению (x,y) соответствовал один пиксель.
После преобразования измерений в декартовую систему координат, создается матрица А размерности (m,n), заполненная нулевыми элементами при помощи командыA=zeros(m,n).
После чего перебираются все преобразованные измерения и соответствующие им ячейки матрицы приравниваются 1
 (26)
(26)
И на основе полученной матрицы строится бинарное изображение.