

Электронная схема управления
В работе используется схема управления униполярного шагового двигателя на полевых транзисторах FZ44NS (Рисунок 23).

Рисунок 23 – Схема управления током обмоток шагового двигателя
Выводы AB(черный) иCD(белый) шагового двигателя подключены к +12В. А выводыA,B,CиDподключены к стокам транзисторов, которые играют роль ключей и замыкаясь подают на выводы нулевое напряжение, вследствие чего ток течет по обмоткам двигателя.
Концевой датчик
На нижней платформе расположена оптопара (Рисунок 24), она нужна для определения начального положения сканера.
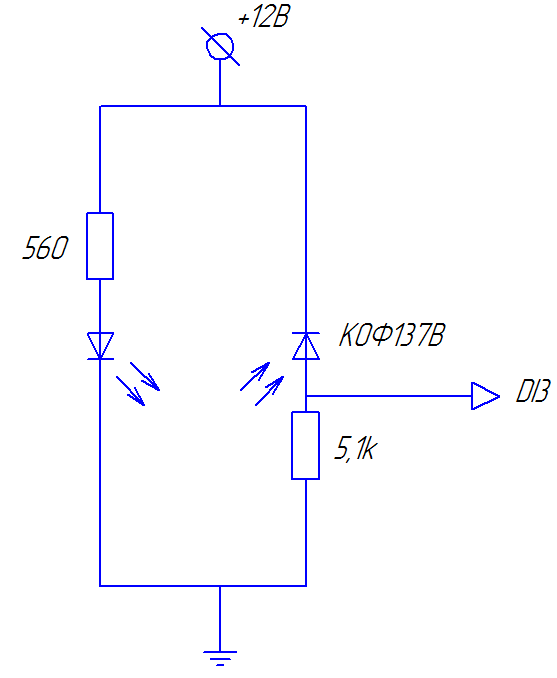
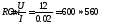
Рисунок 24 – Схема оптопары
Оптопара состоит из инфракрасного светодиода и фотодиода КОФ137В с нагрузкой 5,1 кОм. Для того чтобы светодиод работал, через него нужно пропустить ток приблизительно равный 20 мА. Для этого необходим резистор с номиналом:
 (19)
(19)
Когда между светодиодом и фотодиодом нет преграды, напряжение на нагрузке фотодиода равно 3.4 В, что соответствует уровню логической 1 для платы ArduinoUNO. Как только между свето- и фотодиодом встает оптический прерыватель, расположенный на верхней платформе, напряжение падает до 0,1 В, что соответствует логическому 0. При этом срабатывает прерывание и программа управления определяет начальное положение.
Управление механикой сканера
Для обеспечения сканирования, двигатель поворачивает верхнюю платформу в горизонтальной плоскости (Рисунок 25).
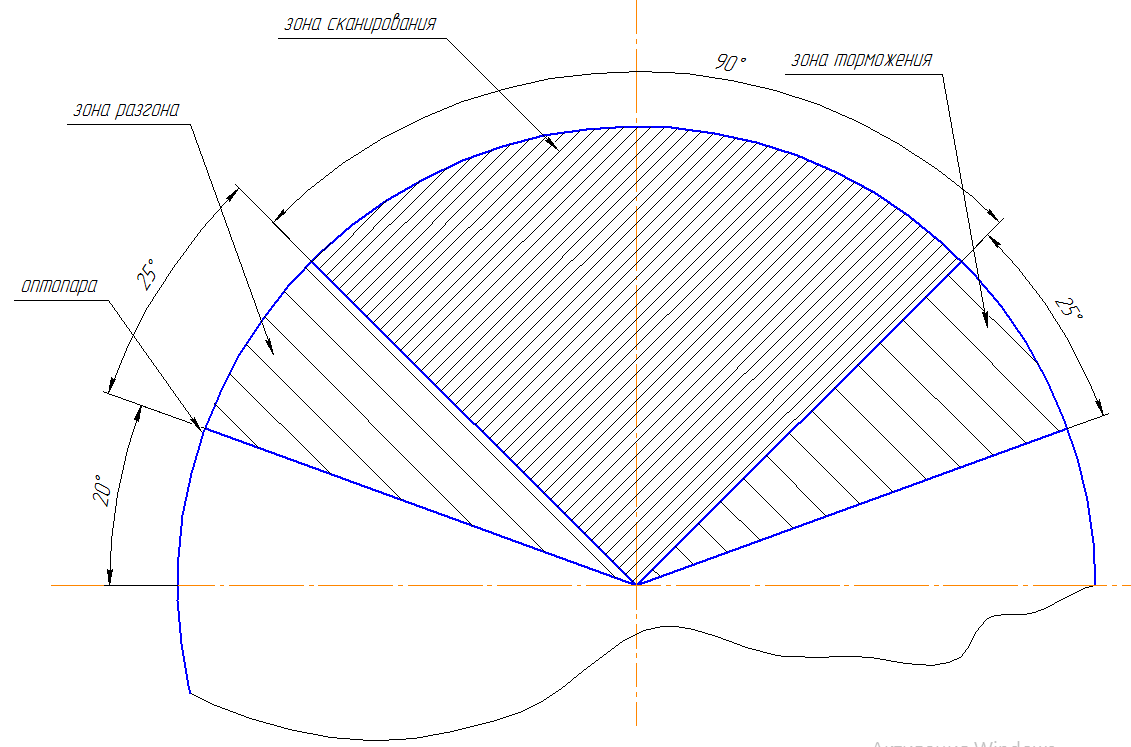
Рисунок 25 – Зоны работы сканера
В целях увеличения точности и стабильности работы сканера, целесообразно проводить определение начального положения при каждой итерации. Это позволит уменьшить риск накопления угловой ошибки, из за возможного пропуска шагов двигателем.
Двигатель управляется в полушаговом режиме. Преимущества и недостатки полушагого режима по сравнению с полношаговым приведена в таблице (Таблица 6).
Таблица 6 – Преимущества и недостатки полушагового режима
|
Преимущества |
Недостатки |
|
Более высокая разрешающая способность без применения более дорогих двигателей Меньшие проблемы с явлением резонанса. Резонанс приводит лишь к частичной потере момента, что обычно не мешает нормальной работе привода.
|
Довольно значительное колебание момента от шага к шагу. В тех положениях ротора, когда запитана одна фаза, момент составляет примерно 70% от полного, когда запитаны две фазы. Эти колебания могут явиться причиной повышенных вибраций и шума, хотя они всё равно остаются меньшими, чем в полношаговом режиме. |
Как видно из рисунка 25, механика сканера работает в 3 зонах, самой важной зоной является зона сканирования. В этой зоне двигатель должен обеспечить постоянную угловую скорость. Зона сканирования имеет величину 900, что соответствует 100 полушагам двигателя. Один полушаг двигатель выполняет за 50 мс. Временная диаграмма управления шаговым двигателем приведена на рисунке (Рисунок 26).
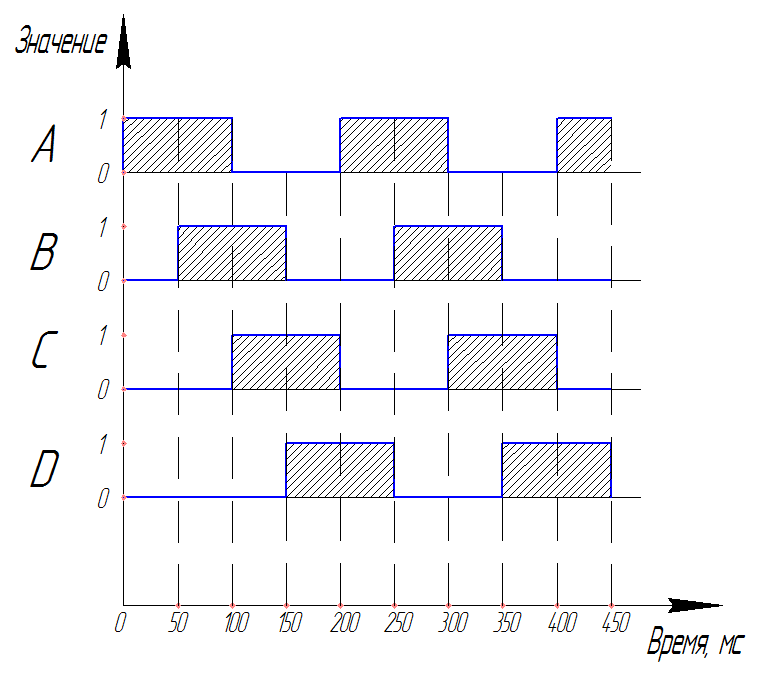
Рисунок 26 – Временная диаграмма управления двигателем
Исходя из этих данных, можно рассчитать время нахождения сканера в зоне сканирования, а так же угловую скорость двигателя.
 (20)
(20)
 (21)
(21)
Дальномер измеряет расстояние с частотой 1 КГц, то есть одно измерение занимает 1 мс. Следовательно в зоне сканирования дальномер сделает:
 (22)
(22)
Каждое измерение сдвинуто относительно предыдущего на угол равный:
 (23)
(23)
Этот угол рассчитан исходя из того, что двигатель за 1 полушаг смещается на 0.90, и за время этого поворота дальномер делает 50 измерений.
Угол равный 0.0180обеспечивает на расстоянии 10 метров разрешение:
 (24)
(24)