

Проектно-конструкторская часть
Технические характеристики разработанного лазерного сканирующего дальномера
Для реализации SLAMнеобходима аппаратная база. В совместной работе кафедры «Мехатроника и Робототехника» с предприятием ОАО «Восход КРЛЗ» был разработан сканирующий лазерный дальномер. Трехмерная модель сканера приведена на рисунке (Рисунок 3).
Технические характеристики:
Тип лазера: Импульсный;
Мощность лазерного излучения: 75 Вт в импульсе;
Угол сканирования: 900;
Высота плоскости сканирования относительно основания: 140 мм;
Количество точек в одном скане: 5000 точек;
Максимальное измеряемое расстояние: 31 м;
Погрешность измерений: до ±2% от измеряемого расстояния;
Напряжение питания: 12 В;
Ток потребления: 0.9 А;
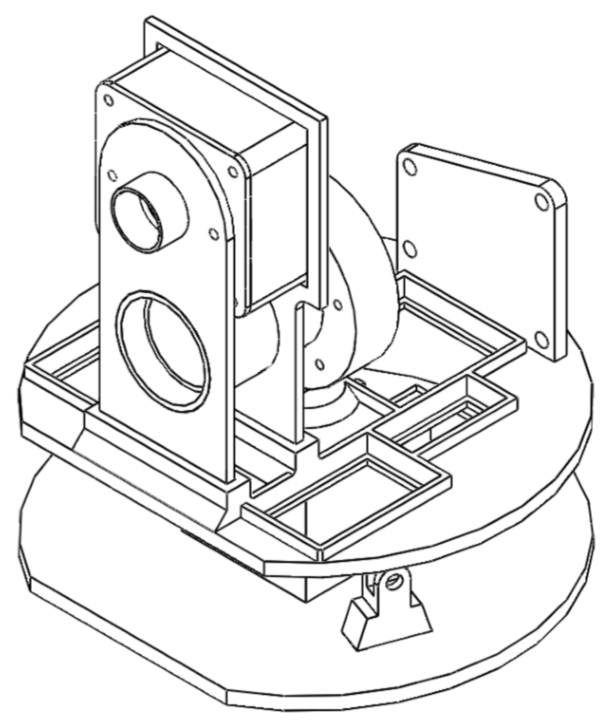
Рисунок 3 – Трехмерная модель сканера
Структурная схема сканирующего лазерного дальномера
Техническое задание было сформировано предприятием ОАО «Восход КРЛЗ».
Основные положения ТЗ:
Дальномер должен работать на основе импульсного метода дальнометрирования;
Отказ от использования дорогостоящих ПЛИС схем;
В качестве лазерного диода использовать SPL_PL90_3 фирмы изготовителя OSRAM;
По возможности использовать компонентную базу производимую предприятием заказчиком
Во ходе работы была разработана структурная схема сканирующего лазерного дальномера (Рисунок 4).
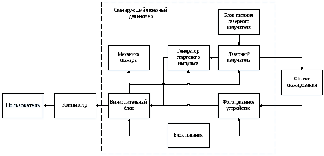
Рисунок 4 – Структурная схема дальномера
Во избежание передачи электромагнитных помех от схемы запуска лазера в фотоприёмное устройство, и повышения точности измерений, было решено разделить питание лазерного излучателя от питания остальной схемы [9].
Разработка сканирующего лазерного дальномера разделилась на этапы:
Разработка электронных схем
Разработка фотоприёмного устройства;
Разработка лазерного излучателя;
Разработка генератора стартового импульса;
Разработка вычислительного блока;
Разработка блока питания;
Разработка механики лазерного сканирующего дальномера
Разработка электронных схем
Разработка фотоприёмного устройства
Для того чтобы принять отраженный от объекта сигнал необходимо фотоприёмное устройство (ФПУ). Оно включает в себя линзу, оптический фильтр, корпус, фотодиод, схему усиления сигнала (Рисунок 5), и компаратор. Максимальная дальность сканирования в первую очередь зависит от ФПУ и уже потом от мощности лазера [10].
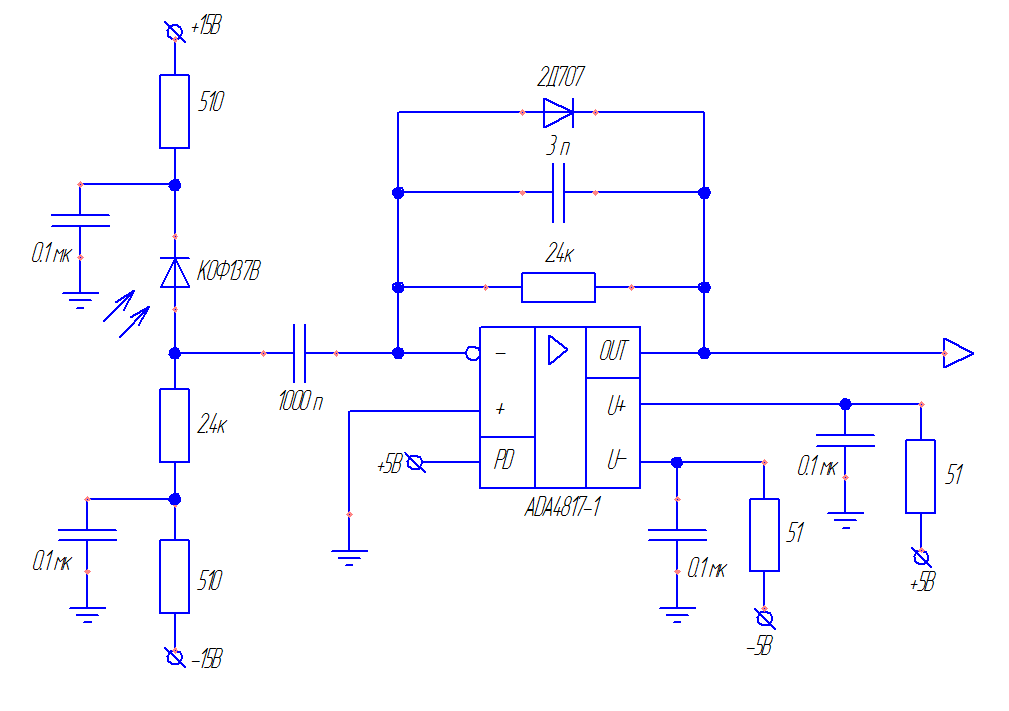
Рисунок 5 – Первый каскад усилителя
В схеме используется фотодиод КОФ137В производства КРЛЗ «Восход», он имеет следующие характеристики:
Чувствительность: 0,75 А/Вт;
Темновой ток: 10 нА;
Чувствительность отражает изменение электрического состояния на выходе фотодиода при подаче на вход единичного оптического сигнала. Количественно чувствительность измеряется отношением изменения электрической характеристики, снимаемой на выходе фотоприёмника, к световому потоку или потоку излучения, его вызвавшему.
В физикеиэлектроникетемновым током называют малыйэлектрический ток, который протекает пофотодиоду, в отсутствии падающихфотонов. Физической причиной существования темнового тока являются случайные генерацииэлектроновидыроквp-n слоеустройства, которые затем начинают упорядоченно двигаться за счет сильногоэлектрического поля. Темновой ток — один из главных источников шума [11].
Усилитель представляет собой 3 каскада выполненных на ОУ ADA4817-1, технические характеристики которого приведены в [12]. Первый каскад является преобразователем ток-напряжение с коэффициентом усиления 2400. Второй и третий каскады – это одинаковые усилители с коэффициентом усиления 10 (Рисунок 6).
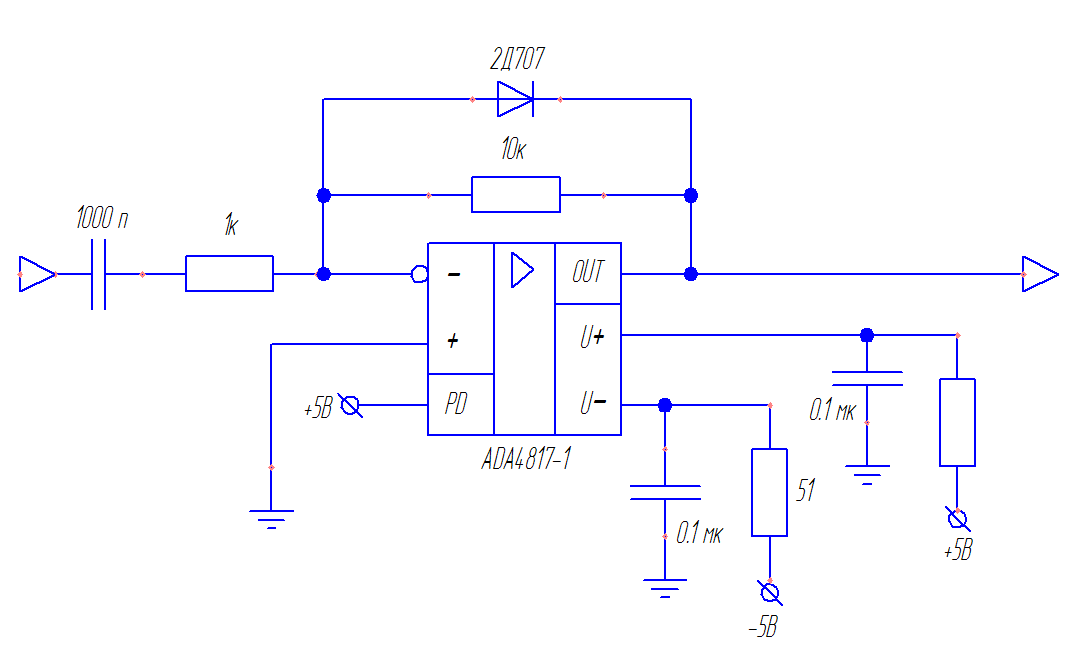
Рисунок 6 – Второй и третий каскады усиления
Одним из важнейших расчетов фотоприёмного устройства является энергетический расчет.
У любого фотоприёмника, помимо темнового тока фотодиода, есть шумовой ток, зависящий от полосы пропускания, который рассчитывается по формуле:
 (6)
(6)
Исходя из формулы (6) шумовой ток прямо пропорционален корню квадратному из полосы пропускания фотоприёмника.
Для нахождения шумового тока рассчитаем полосу пропускания фотоприёмника. Резистор и конденсатор в обратной связи представляют собой фильтр верхних частот, а в паре с обвязочным конденсатором этот резистор образует фильтр верхних частот. Для расчета частоты среза RC-фильтров применяют формулу:
 (7)
(7)
Используя формулу (7) найдем верхнюю и нижнюю границу полосы пропускания фотоприёмника:
 (8)
(8)
 (8)
(8)
Зная значения верхней и нижней границы можно рассчитать полосу пропускания:
 (10)
(10)
Подставляя значение, полученное в (10), в формулу (6) рассчитаем величину шумового тока:
 (11)
(11)
Для того чтобы определить полезный сигнал на фоне шумов, он должен быть в 5–10 раз больше чем сумма темнового тока фотодиода и шумового тока приёмника [13]. Зададимся значением полезного сигнала, величиной 3 мкА. Исходя из чувствительности фотодиода, определим мощность оптического излучения, которое должно попадать на него для генерации тока равного 3 мкА:
 (12)
(12)
Фотоприёмное устройство, помимо фотодиода и схемы усиления, содержит в своём составе оптическую систему, включающую в себя линзу диаметром 30 мм и фокусным расстоянием 51 мм, и оптический фильтр, пропускающий только излучение с длинной волны 905 нм. Оптический фильтр необходим для уменьшения влияния засветки на фотодиод. Он расположен между линзой и фотодиодом, при его установке необходимо учитывать что фокусное расстояние увеличится на величину равную толщине фильтра. Это происходит потому, что свет распространяется в фильтре параллельными лучами.
Для того чтобы определить максимально возможное расстояние, на котором полезный сигнал будет различим на фоне шумов, проведем энергетический расчет. Лазерный луч, попадая на объект, отражается от него в виде полусферы, и в результате не все излучение попадает на фотоприёмник (Рисунок 7).
Рисунок 7 – Отражение лазерного луча от объекта сканирования. 1 – ФПУ; 2 – лазерный излучатель; 3 – объект сканирования.
Конус, образующийся площадью линзы фотоприёмника и расстоянием до объекта сканирования, называется зрительным углом. Он определяет ту мощность, которая непосредственно попадет на ФПУ. В этом и заключается цель энергетического расчета фотоприёмника.
 (13)
(13)
 – мощность лазерного излучения (для
SPLPL90_3
– мощность лазерного излучения (для
SPLPL90_3 );
D – диаметр линзы ФПУ (D=30 мм);r – расстояние
до объекта.
);
D – диаметр линзы ФПУ (D=30 мм);r – расстояние
до объекта.
Преобразовав формулу (13), выведем r:
 (14)
(14)
Подставив значения в формулу (14) получим максимальное расстояние которое возможно измерить:
 (15)
(15)
Значение полученное в выражении (15) является идеальным, в реальности же большинство объектов поглощают часть излучения. Для объектов, с отражательной способность 18%, максимальное расстояние будет равно:
 (16)
(16)
ФПУ включает в себя компаратор, необходимый для получения логического сигнала. В схеме используется компаратор ADCMP600, технические характеристики которого приведены в [14] (Рисунок 8).
Рисунок 8 – Компаратор