

АННОТАЦИЯ
Квалификационная работа «Разработка мехатронной системы ориентирования с использованием SLAM технологии» посвящена актуальной теме – разработка отечественного аналога мехатронной системы ориентирования в рамках импортозамещения.
Расчётно-пояснительная записка содержит 5 разделов, состоит из 134 страниц, содержит 32 – таблиц, 57 - рисунков. Объём графической части работы составляет 4 листа формата А1.
В проектно - конструкторской части была разработана структурная схема и 3D модель мехатронной системы ориентирования. Спроектированы электронная и механическая части.
В производственно - технологической части после проектирования механической и электронной частей, были изготовлены компоненты системы, произведена сборка и устранение неисправностей. Разработано программное обеспечение, реализующее алгоритмы работы системы.
В организационно - управленческой части приведен расчет стоимости разработки мехатронной системы ориентирования и затрат на эксплуатацию системы.
В исследовательской части произведено исследование сущеструющих решений SLAM, проведено исследование точности разработанной мехатронной системы, проведен опыт по определению перемещения мехатронной системы ориентирования.
В разделе охрана труда и экология приведена оценка условий безопасности труда и произведен расчет воздухообмена рабочего пространства.
Практическая ценность квалификационной работы состоит в разработке отечественного аналога мехатронной системы ориентирования в рамках импортозамещения.
СОДЕРЖАНИЕ
Введение 10
1.Исследовательская часть 12
1.1.Обзор существующих решений 12
1.2.Методы измерения расстояния с использованием лазеров 15
1.3.Описание решения 17
2.Проектно-конструкторская часть 22
2.1.Технические характеристики разработанного лазерного сканирующего дальномера 22
2.2.Структурная схема сканирующего лазерного дальномера 24
2.3.Разработка электронных схем 26
2.3.1.Разработка фотоприёмного устройства 26
2.3.2.Разработка лазерного излучателя 34
2.3.3.Разработка генератора стартового импульса 38
2.3.4.Разработка вычислительного блока 39
2.3.5.Разработка блока питания 44
2.4.Разработка механики сканирующего лазерного дальномера 48
2.4.1.Технические характеристики двигателя 48
2.4.2.Электронная схема управления 50
2.4.3.Концевой датчик 51
2.4.4.Управление механикой сканера 52
3.Производственно-технологическая часть 56
3.1.Монтаж электронных элементов на платы 56
3.2.Изготовление корпусных деталей на 3D принтере 57
3.3.Алгоритм измерения расстояния 68
3.4.Алгоритм сканирования и построения изображения 70
3.5.Проведение экспериментов 75
3.5.1.Исследование точности на разных дистанциях 75
3.5.2.Определение перемещения на основе анализа изображения полученного при сканировании 79
4.Организационно-управленческая часть 88
4.1.Стоимость 88
4.2.Затраты на электроэнергию 97
5.Охрана труда и защита окружающей среды 98
5.1.Характеристика параметров по обеспечению безопасности труда 98
5.1.1.Характеристика нормативных параметров микроклимата рабочего помещения 98
5.1.2.Характеристика параметров электробезопасности 102
5.1.3.Характеристика параметров электромагнитной безопасности 103
5.1.4.Обеспечение пожаровзрывобезопасности 104
5.1.5.Характеристика параметров акустической безопасности 106
5.1.6.Характеристика параметров освещённости рабочего места сборочного участка 107
5.1.7.Обеспечение защиты монтажника от загрязнений во премя пайки 108
5.2.Защита окружающей среды 112
5.2.1.Определение количества выделяющихся веществ 114
5.2.2.Класс опасности вредных веществ 117
Заключение 120
Список использованных источников 121
ПРИЛОЖЕНИЕ А 124
ПРИЛОЖЕНИЕ Б 132
СПИСОК СОКРАЩЕНИЙ
ВКР – выпускная квалификационная работа;
ОКР – опытно-конструкторская работа;
НИР – научно-исследовательская работа;
SLAM – simultaneous localization and mapping;
ICP – Iterative closest point;
EKF – extended Kalman filter;
КРЛЗ – Калужский радиоламповый завод;
ПЛИС – программируемая логическая интегральная схема;
ФПУ – фотоприёмное устройство;
ОУ – операционный усилитель;
ВЦП– время-цифровой преобразователь;
SPI– serialperipheralinterface;
UART – Universal asynchronous receiver/transmitter;
МГТФ – многожильный гибкий термостойкий с фторопластовой изоляцией;
SMD – surface mounted device.
Введение
Данная выпускная квалификационная работа выполнялась в рамках сотрудничества кафедры «Мехатроника и робототехника» и предприятия ОАО «Восход» КРЛЗ. Техническое задание для ВКР было сформировано предприятием заказчиком.
Актуальность работы заключается в разработке отечественного аналога мехотронной системы ориентирования, в рамках импортозамещения.
Важной задачей в современной робототехнике является разработка способов определения положения робота в окружающем пространстве. Не зная положения робота в пространстве, не зная как выглядит окружающее пространство невозможно решить даже простейшую задачу движения из точки А в точку Б. Наиболее часто используемые способы определения положения – интегрирование перемещений робота (с помощью одометрии) или применение маяков, установленных в определенных местах. Использование маяков не универсально и требует предварительного оборудования рабочих помещений, при этом маяки постоянно должны быть в зоне видимости роботом. Интегрирование показаний одометров не обеспечивает точности позиционирования из-за накопления ошибки по всем отслеживаемым координатам.
При этом необходимо не только определение собственного положения, но и запоминание и сохранение изображения окружающего пространства для областей, информации о которых нет в памяти робота. Так же необходимо предотвращение столкновений робота с окружающими предметами, для этого эффективно использовать дальномеры.
Целью выпускной квалификационной работы было разработать мехатронную систему ориентирования с использованием SLAMтехнологии.
В ходе работы передо мною были поставлены следующие задачи: исследовать существующие решения SLAM; разработать электронную часть мехатронной системы ориентирования; разработать механическую часть мехатронной системы ориентирования; разработать алгоритмы работы мехатронной системы ориентирования; разработать программное обеспечение, реализующее алгоритмы работы мехатронной системы ориентирования; провести исследование точности разработанной мехатронной системы ориентирования; провести эксперимент по определению перемещения на основе анализа изображений, полученных при сканированиях.
Исследовательская часть
Обзор существующих решений
Наиболее передовые алгоритмы используют изображение с веб-камер и дальномеров для определения положения робота. Эти методы являются более точными и универсальными. Разработками подобных алгоритмов занимаются ведущие мировые университеты. В иностранной литературе [1] алгоритмы определения положения робота на карте одновременно с построением карты называют аббревиатурой SLAM (Simultaneous Location and Mapping). Большинство реализованных алгоритмов основаны на применении фильтров частиц. Для определения положения они используют "особые точки" в имеющихся данных, которых обычно не так уж много, особенно в привычных прямоугольных помещениях, где ими являются только углы. Поэтому при длительной работе возникают ошибки – полученный образ пространства искажается, хотя возможность навигации по карте сохраняется [2]. Значит, необходим алгоритм вычисления положения робота, адекватно работающий при малом числе особых точек и не искажающий пространство при длительной работе. . Обобщенный алгоритм работы системы определения положения робота приведен на рисунке (Рисунок 1).
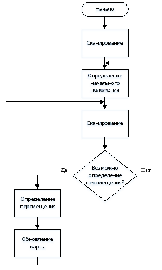
Рисунок 1 – Обобщенный алгоритм работы системы определения положения робота
Сложность технического процесса определения текущего местоположения и построения карты обусловлена низкой точностью приборов, участвующих в процессе вычисления текущего местоположения. Метод одновременной навигации и построения карты (SLAM) — это концепция, которая связывает два независимых процесса в непрерывный цикл последовательных вычислений. При этом результаты одного процесса участвуют в вычислениях другого процесса [3].
Однако даже при наличии качественного лазерного дальномера задача составления карты нетривиальна: для этого необходимо с высокой точностью определить текущее положение робота, а для того, чтобы определить положение по показаниям дальномера, нужно составить карту. Прямолинейные подходы к решению задачи, в которых сначала производится локализация по существующей частично составленной карте, а затем на основе наиболее вероятного текущего положения достраивается недостающая ее часть, имеют тенденцию к составлению карт с ошибками. Более того, эти ошибки накапливаются с течением времени. Движение робота по замкнутому кругу при таком подходе может привести к серьезным проблемам с выравниванием в месте замыкания цикла.
Одним из первых алгоритмов, способных решать данную задачу в один проход и без дополнительных эвристик для разрешения циклов, был FastSLAM. Этот алгоритм основывался на идее Мерфи. Он использовал фильтр частиц Рао-Блэквелла для построения гипотез о текущем положении робота и фильтр Калмана для отслеживания положений наперед заданных меток [4]. Данный метод решал проблему составления карты ценою введения меток. Проблема же их распознавания была достаточно сложна, хотя существовали наработки и по этой тематике.