

2.11. Особенности обнаружения изменений параметров сигнала
Статистическая теория обнаружения сигналов на фоне помех была первоначально разработана для целей поиска малых сигналов в радиолокации, а впоследствии полученные результаты были распространены на задачи гидролокации, эхо-импульсной дефектоскопии и т. д. Во всех этих областях имеется сходство в формулировке задачи: с некоторой вероятностью, зачастую априорно неизвестной, появляется полезный сигнал, который и нужно обнаружить на фоне различного рода помех. Основные идеи теории обнаружения могут быть распространены и на задачи просвечивания: теневой метод дефектоскопии, медицинского рентгеновского просвечивания и т. п. Особенностью методов просвечивания является то, что сигнал имеется и в отсутствие интересующих нас объектов в контролируемой среде. Наличие выявляемого объекта изменяет те или иные параметры сигнала (чаще всего амплитуду и время прихода) ([10], [11]). Параметры эти могут изменяться и под влиянием каких-то мешающих воздействий. При этом необходимо выявить только те изменения информативного параметра, которые вызваны наличием объекта. Этот подход может быть распространен и на все ситуации, когда сигнал, приходящий на фоне помех, присутствует постоянно, и нам необходимо обнаруживать изменения тех или иных его параметров, вызванные какими-то внешними воздействиями.
Рассмотрим
задачу более подробно на примере теневого
амплитудного дефектоскопа. Наличие
дефекта в контролируемом изделии
приводит к изменению амплитуды
принимаемого сигнала. В ультразвуковых
дефектоскопах амплитуда принимаемого
сигнала на дефектных участках практически
всегда уменьшается, в радиационных
дефектоскопах дефект может как увеличивать
уровень принимаемого сигнала (дефект
– включения из материалов более легких,
чем материал изделия), так и уменьшать
его (дефект – включения из м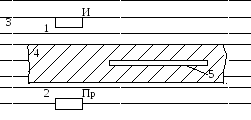 атериалов
более тяжелых, чем материал изделия).
атериалов
более тяжелых, чем материал изделия).
Рис. 2.13
Пусть металлическое изделие 4, погруженное в жидкость 3 (рис. 2.13), контролируется теневым ультразвуковым дефектоскопом. Из-за небольших изменений затухания ультразвуковых колебаний в материале изделия, рассеяния их на неровностях поверхностей изделия и ослабления из-за остаточных загрязнений и ряда других причин амплитуда прошедшего ультразвукового сигнала при перемещении излучающего 1 и приемного 2 преобразователей вдоль поверхности изделия все время флуктуирует. Закон распределения амплитуд U прошедших сигналов на бездефектном участке изделия может быть описан плотностью распределения вероятностей p(U). Наличие протяженного звукопрозрачного дефекта 5 с акустической прозрачностью T (T < 1) соответственно изменит в T раз амплитуды всех сигналов на этом участке. Плотность распределения вероятностей амплитуд преобразуется в pT(U), как показано на рис. 2.14.
При этом вид закона распределения останется прежним, а математическое ожидание и среднеквадратическое отклонение изменятся в T раз.
При контроле амплитуда прошедшего сигнала сравнивается с порогом U0 . Если она меньше порога, принимается решение о наличии дефекта, если больше – о его отсутствии. Таким образом, порядок принятия решения здесь обратен тому, который был описан ранее.
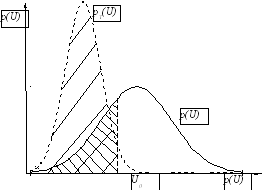
Рис. 2.14
При этом условные вероятности равны:
 –
ложная тревога, (2.24)
–
ложная тревога, (2.24)
![]() – пропуск цели, (2.25)
– пропуск цели, (2.25)
 – правильное обнаружение. (2.26)
– правильное обнаружение. (2.26)
Если известен закон распределения, то из формул (2.24)–(2.26) можно получить конкретные соотношения, позволяющие связать значения рабочего порога с характеристиками флуктуаций и надежностью контроля. Некоторые результаты расчетов изложены в [12].
Если по условиям задачи отслеживаемое изменение параметра исследуемого объекта или явления вызывает не уменьшение, а увеличение амплитуды сигнала, то пределы интегрирования в формулах (2.24)–(2.26) соответственно изменятся.