

МАОС без 1 главы
.pdfВведение
В информационных системах различного назначения полезные сигналы поступают всегда на фоне помех различного происхождения. Под помехой будем понимать 1 любое воздействие на полезный сигнал, затрудняющее его прием и регистрацию. Для уверенного обнаружения полезных сигналов и измерения тех или иных их параметров необходимо обеспечить достаточное превышение энергии сигнала над энергией помех. Но при современном состоянии схемотехники информационных систем резервы повышения энергии полезного сигнала практически исчерпаны. Кроме того, некоторые помехи, например, реверберационная, растут одновременно с увеличением сигнала.
Поэтому наиболее верный путь развития информационных систем заключается в оптимизации режимов обработки принимаемого сигнала с целью максимального увеличения отношения сигнал / помеха. Это может быть достигнуто прежде всего использованием фильтров с оптимальными частотными и импульсными характеристиками. Поскольку все чаще задача обнаружения полезного сигнала возлагается на автоматические устройства, очень важной оказывается также разработка оптимальных алгоритмов обнаружения и обнаружителей, реализующих эти алгоритмы. Это обосновывает необходимость изучения студентами направления «Приборостроение» вопросов обработки сигналов с учетом специфики использования соответствующих приборов и систем.
3
1. ФИЛЬТРАЦИЯ СИГНАЛОВ НА ФОНЕ ПОМЕХ
1.1. Постановка задачи фильтрации
Пусть на входе системы действует колебание x(t) = F [s(t, ), n(t)],
где s(t, ) – полезный сигнал, n(t) – помеха, – совокупность интересующих нас параметров i(t), причем сам сигнал s(t, ), или параметр i(t) – случайные процессы. Помеха n(t) может быть произвольной; сигнал и помеха не обязательно представляют собой аддитивную смесь. Считается, однако, что вид функции F (т. е. способ комбинирования сигнала и помехи) и некоторые статистические характеристики случайного сигнала и помехи нам известны. С учетом этих априорных сведений нужно решить, какая из возможных реализаций самого сигнала s(t, ) или его параметра содержится в принятом колебании x(t). Из-за наличия помех и вследствие случайного характера сигнала оценка реализации сигнала или его параметра зачастую не будет совпадать с истинным значением, что приводит к ошибкам фильтрации. К тому же к фильтрам, предназначенным для использования в различных устройствах, предъявляются различные, порой противоречивые требования. Поэтому и характеристики фильтров должны удовлетворять различным критериям. Фильтры, предназначенные для устройств обнаружения, должны обеспечить максимум отношения сигнал/помеха. Фильтры, предназначенные для устройств измерения тех или иных параметров, должны отвечать критерию минимума среднеквадратической погрешности. Возможны и другие виды критериев, по которым строятся характеристики.
1.2. Оптимальные фильтры устройств обнаружения
Оптимальные линейные фильтры широко применяются при обнаружении и различении детерминированных сигналов, причем критерием оптимальности характеристик таких фильтров является получение на выходе фильтра максимально возможного отношения пикового значения сигнала к среднеквадратическому значению помехи. Цель обработки при этом состоит не в воспроизведении формы сигнала, которая считается известной, а в наиболее надежной фиксации лишь факта наличия или отсутствия сигнала в принятом колебании.
4

Найдем выражение для комплексной частотной характеристики оптимального фильтра [5]. Пусть на вход линейного фильтра с комплексной частотной характеристикой K(j ) воздействует сумма полностью известного сигнала s(t) и помехи n(t), представляющей собой стационарный в широком смысле случайный процесс с известной спектральной плотностью Sn( ) [4]:
x(t) = s(t) + n(t) , 0 t T .
Обозначим полезный сигнал и помеху на выходе фильтра через sв(t) и nв(t). Известно, что если на вход линейной системы с комплексной частотной характеристикой K(j ) воздействует сигнал s(t), имеющий комплексный амплитудный спектр
|
|
|
|
Ф( j ) |
s(t)e |
||
|
|||
|
|
|
j t dt
,
то комплексный спектр сигнала на выходе системы определяется произведением Ф(j )K(j ), а сам выходной сигнал – выражением
s |
(t) |
в |
|
1 |
|
||
|
(jω)K(jω)e |
||
2π |
|||
|
|||
|
|
||
jωt |
dω |
|
.
(1.1)
Спектральная плотность помехи на выходе фильтра определяется выражением Sn( )|K(j )|2, а ее дисперсия
Dв
1 |
|
||
|
Sn ω K |
||
2π |
|||
|
|||
|
|
||
jω  2
2
dω
.
(1.2)
На основании формул (1.1) и (1.2) получаем выражение для отношения сигнал / помеха по мощности на выходе фильтра в некоторый момент времени t0 :
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
t |
|
|
2 |
|
|
| jωK jωe jωt0 dω|2 |
|
|
||||||
|
|
|
|
|
|||||||||||||
|
|
|
|
|
1 |
|
|
||||||||||
Q |
|
в |
0 |
|
|
|
|
. |
(1.3) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Dв |
|
|
|
2π |
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Sn ω |
|
K jω |
|
2 dω |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Необходимо найти такую функцию K(j ), при которой выражение (1.3) в некоторый момент времени t0 достигает максимума. Одним из путей решения этой задачи является использование неравенства Шварца-Буняковского. Известно, что для двух произвольных комплексных функций f(x) и g(x) выполняется соотношение
5
|
|
|
2 |
|
|
|
|
|
|
* x g x dx |
|
f x |
2 |
||||
|
f |
|
|
dx |
||||
|
||||||||
|
|
|
|
|
|
|
|
g x |
2 |
dx |
|
,
(1.4)
причем знак равенства имеет место только в случае, когда g(x) = c0 f(x), где c0 – постоянная; f*(x) – функция, комплексно-сопряженная f(x).
Запишем выражение (1.4), перейдя к переменной ω , в виде
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f* ωg ωdω |
|
|
|
|
|
||||
|
|
|
|
|
|
f ω |
2 |
|
|
|
|
|
|
|
|
|
dω. |
||||
|
|
g ω |
|
|
||||||
|
|
2 |
dω |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Полагая здесь |
jωe |
|
|
|
|
|
|
|
|
|
|
jωt |
|
|
|
|
|
|
|
||
f* ω |
|
|
0 |
|
g ω K jω |
|
|
ω, |
||
|
|
|
, |
S |
||||||
|
2πS |
|
ω |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
||
|
n |
|
|
|
|
|
|
|
|
|
получаем
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
jωK jωe jωt0 dω |
1 |
jω 2 |
|||||
|
1 |
|
|
|
|||||||
Q |
|
|
|
|
|
|
|
2π |
|
|
dω |
2π |
|
2 |
|
S |
ω |
||||||
|
|
|
|
Sn ω K jω |
dω |
|
n |
|
|
||
|
|
|
|
|
|
|
|
|
|||
(1.5)
(1.6)
Отсюда следует, что максимально возможное значение отношения сигнал / помеха
|
1 |
|
Ф |
j |
2 |
|
|
|
|
||
|
|
|
|
|
|
Q |
2 |
|
S |
|
d . |
|
|
|
|||
|
|
n |
|
|
(1.7)
Согласно соотношению (1.5), это значение достигается лишь при выполнении условия
K jω |
|
|
c0 * jω e j |
ωt0 |
|
||
Sn ω |
, |
||||||
|
|
|
|||||
|
|
|
|
||||
|
|
|
|
2πSn ω |
|
||
или
K jω c |
* jω |
jωt |
|
, |
||
|
ω |
e |
|
0 |
||
|
|
|
|
|
||
|
S |
|
|
|
|
|
|
n |
|
|
|
|
|
(1.8)
где c – некоторая постоянная; t0 – момент времени, соответствующий наибольшему значению отношения сигнал/помеха на выходе фильтра. Таким образом, комплексная частотная характеристика оптимального линейного фильтра определяется формулой (1.8), а наибольшее отношение сигнал по-
6

меха – выражением (1.7). Варьируя спектры сигнала Ф(j ) и помехи Sn( ) в формуле (1.7), можно при некоторых дополнительных условиях (например, постоянство энергии или мощности сигнала и др.), налагаемых на систему, найти наилучшую форму спектра сигнала (при которой максимизируется Q ) и наихудшую спектральную плотность помехи (при которой Q минимизируется).
В некоторых устройствах, например служащих для определения момента появления импульса, применяются фильтры, которые должны обеспечивать получение максимально возможного отношения крутизны сигнала к среднеквадратическому значению помехи. Такие фильтры можно назвать оптимальными по крутизне сигнала. Для определения комплексной частотной характеристики такого фильтра вместо самого сигнала s(t) надо рассматривать его производную по времени s (t) . При этом комплексная частотная характеристика фильтра, оптимального по крутизне сигнала, определяется выражением
|
|
|
jω |
|
|
|
|
|
jω c |
* |
|
|
|
|
|
K |
1 |
|
ω |
e |
jωt |
0 |
|
|
|
||||||
1 |
1 |
S |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
n |
|
|
|
|
|
,
где Ф1*(j ) – комплексно-сопряженное значение спектра производной входного сигнала; с1 – некоторая постоянная. Максимально возможное отношение крутизны сигнала к среднеквадратическому значению помехи будет
|
|
1 |
|
Ф |
( j ) |
2 |
|
|
|
|
|
||||
1 |
|
|
|
1 |
|
|
d |
Q |
2 |
|
S |
|
( ) |
||
|
|
|
n |
|
|||
|
|
|
|
|
|
||
.
Используя известное соотношение для преобразования Фурье производной сигнала:
d n s(t) ( j )n Ф( j ) , dt n
можно записать:
Ф |
( j ) |
1 |
|
j Ф(
j )
.
Тогда
K ( j ) c |
|
j Ф*( j ) |
e |
j t |
0 , |
||||||||
|
|
|
|
|
|
|
|
|
|||||
1 |
1 |
|
Sn |
( ) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
2 |
|
Ф( j ) |
|
|
2 |
|
|
||
|
|
|
|
|
|||||||||
Q1max |
|
|
|
|
|
|
|
|
|
|
d . |
||
|
|
|
|
|
|
|
|
||||||
2 |
|
|
Sn ( ) |
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||
7
1.3. Согласованные фильтры
До сих пор на помеху n(t) не налагалось никаких ограничений, кроме стационарности в широком смысле. Рассмотрим теперь помеху в виде гауссовского белого шума. Линейный фильтр, на выходе которого получается максимально возможное пиковое значение отношения сигнал/помеха при приеме полностью известного сигнала на фоне гауссовского белого шума, называется согласованным фильтром. Найдем выражение для комплексной частотной характеристики согласованного фильтра. Для этого положим
|
|
N |
|
S |
0 |
const. |
|
n |
|
2 |
|
|
|
|
вид:
Тогда выражения
Q |
|
|
2E |
s , |
|
|
|||
0 |
|
N |
|
|
|
|
|
0 |
|
K |
0 |
jω k * |
||
|
|
|
|
|
(1.7) и (1.8) примут соответственно
(1.9)
jωe |
jωt |
0 |
, |
|
|
|
где k – постоянная, характеризующая коэффициент передачи фильтра; Es – энергия сигнала:
|
|
2 |
t dt |
|
Es |
s |
|||
|
||||
|
|
|
|
1 |
|
2 |
|
|
Ф j |
d . |
|||
2 |
|
|||
|
|
|
||
|
|
|
Запишем спектр входного сигнала и комплексную частотную характеристику фильтра в виде
jω jω e |
j s ω |
jω K0 jω e |
j ω |
; K0 |
. |
Здесь s – фазовый спектр сигнала, – фазо-частотная характеристика фильтра.
Тогда выражения для амплитудно-частотной и фазочастотной характеристик согласованного фильтра будут иметь вид
K |
jω |
k jω ; |
ω |
ω ωt |
. |
0 |
|
|
s |
0 |
|
Видно, что амплитудно-частотная характеристика (АЧХ) согласованного фильтра пропорциональна амплитудному спектру входного сигнала (АЧХ фильтра «согласована» со спектром сигнала), а фазочастотная характеристика (ФЧХ) равна сумме фазочастотного спектра сигнала, взятого с обратным знаком, и фазового спектра задержки (– t0).
8

Совпадение формы АЧХ фильтра с амплитудным спектром сигнала обеспечивает наилучшее выделение наиболее интенсивных участков спектра сигнала. Фильтр ослабляет участки спектра с относительно низким уровнем спектральных составляющих; в противном случае наряду с ними проходили бы интенсивные шумы. При этом форма сигнала на выходе фильтра искажается. Однако это не имеет существенного значения, так как задача фильтра в данном случае состоит не в точном воспроизведении входного сигнала, а в формировании наибольшего пика выходного сигнала на фоне шума. Существенную роль в этом отношении играет фазочастотная характеристика фильтра ( ).
Подставив в формулу (1.1) выражение (1.9), получим выражение для полезного сигнала на выходе согласованного фильтра:
|
k |
|
|
|
|
|
|
jωt t |
|
|
k |
|
|
|
|
|
|||
sв t |
|
|
|
jω |
|
2 |
e |
dω |
|
|
jω |
|
2 |
cos t t0 |
dω. |
||||
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Отсюда видно, что сигнал на выходе фильтра определяется только амплитудным спектром входного сигнала и не зависит от его фазового спектра. Последнее обусловлено тем, что взаимные фазовые сдвиги спектральных со-
ставляющих входного сигнала s( ) компенсируются ФЧХ фильтра. Поэтому все гармонические составляющие одновременно достигают амплитудных значений в момент времени t = t0 и, складываясь, дают пик выходного сигнала:
sвmax t0 2kπ  jω
jω 2 dω k Es.
2 dω k Es.
Если бы ФЧХ фильтра не компенсировала фазовых сдвигов спектральных составляющих входного сигнала, то максимумы гармонических составляющих не совпадали бы по времени, что привело бы к уменьшению или раздроблению пика выходного сигнала.
Следует отметить, что согласованным фильтром (1.9) можно пользоваться и при приеме полностью известного сигнала на фоне стационарной помехи с произвольной спектральной плотностью Sn( ). Для этого формально достаточно пропустить принимаемое колебание x(t) через дополнительный линейный фильтр, который преобразует помеху n(t) в белый шум. ФЧХ фильтра может быть любой, а АЧХ такого дополнительного “обеляющего” фильтра должна иметь вид
9
|
~ |
|
|
~ |
|
|
|
|
|
|
|
|
|
||
|
jω |
|
k |
|
|
|
, |
|
|
|
|
|
(1.10) |
||
|
K |
S |
|
|
ω |
|
|
|
|
|
|||||
|
|
|
n |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где |
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k – постоянная. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На выходе обеляющего фильтра помеха превратится в белый шум с по- |
||||||||||||||
стоянной спектральной плотностью |
Sn ω |
~ |
jω |
2 |
~2 |
const, |
а комплексный |
||||||||
K |
|
|
|
k |
|||||||||||
спектр сигнала будет |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
||
|
|
~ |
|
|
k Ф j |
|
|
|
|||||||
|
|
Ф j |
|
|
|
|
|
. |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Sn |
|
|
|
|||||||
После этого можно воспользоваться полученными ранее формулами. В соответствии с выражением (1.9) комплексная частотная характеристика соответствующего согласованного фильтра
~ |
|
k * jω |
e |
jωt |
0 . |
|
||||
K (jω) |
|
|
|
|
|
|
||||
|
0 |
|
S |
|
(ω) |
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Оптимальный фильтр представляет собой последовательное соединение |
||||||||||
~ |
j |
|
|
|
|
|
|
|
|
~ |
двух фильтров: обеляющего K |
и согласованного K 0 j . Его комплекс- |
|||||||||
|
|
|
~ |
|
|
~ |
|
|
|
|
ная частотная характеристика |
K(jω) K jω |
K0 jω |
естественно совпадает с |
|||||||
соотношением (1.8).
Пользуясь допустимой свободой выбора фазовой характеристики обеляющего фильтра, можно попытаться выбрать ее так, чтобы оптимальный фильтр был физически реализуем. Если спектральную плотность помехи Sn( ) можно аппроксимировать рациональной функцией частоты (что на практике не ограничивает общности), то для получения физически реализуемого оптимального линейного фильтра используют разложение Sn( ) на ком- плексно-сопряженные сомножители. Рассмотрим пример.
Пусть помехой является гауссовский шум, имеющий спектральную плотность Sn( ) = 2 D/( 2+ 2), где D – дисперсия шума. Тогда согласно формуле (1.10) имеем
~ |
|
2 |
|
~2 |
|
|
~2 |
2 |
2 |
|
|
|
~ |
|
|
|
|
|
|
|
~ |
|
|
|
jω |
|
k |
|
k |
α |
ω |
|
|
k |
|
α jω |
|
k |
|
α jω. |
|||||||||
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Sn ω |
|
2αD |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
2αD |
2αD |
|||||||||||||||||
Таким образом, получаем два равноценных варианта обеляющих филь- |
||||||||||||||||||||||||
тров: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
~ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K1,2 jω |
|
|
|
|
|
(α jω) |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
2αD |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
10
Найдем импульсную характеристику согласованного фильтра:
|
t |
1 |
|
|
|
|
jωe |
jωt |
|
|
|
|
|
k |
|
* jωe |
jωt t |
|
||||||||||||
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
||||||||||||||||||
|
|
K |
|
|
|
dω |
|
|
|
|
0 |
dω |
||||||||||||||||||
h |
2π |
|
|
|
|
|
|
2π |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
k |
|
* jωe |
jωt |
|
t |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
0 |
|
|
|
|
dω |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
k |
|
jω e |
jωt |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
d |
ω. |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Учитывая выражение для входного сигнала |
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
j t |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
s(t) |
|
|
|
Ф( j )e |
d |
, |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
получаем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
h0(t) k s(t0 t) . |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s(t0+t) |
|
|
|
|
|
|
|
|
|
|
s(t0 – t) = h0(t) |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t
t0
(1.11)
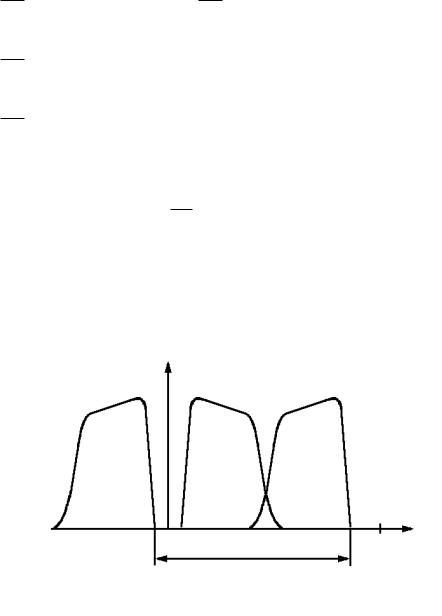
Рис. 1.1
Следовательно, импульсная характеристика согласованного фильтра целиком определяется формой сигнала («согласована» с сигналом). На рис. 1.1 изображен импульсный сигнал s(t) длительностью и, появившийся в момент
времени t = 0 .
Очевидно, что функция s(t0+t) появляется на время t0 раньше, чем сигнал s(t). Функция же s(t0–t) является зеркальным отображением функции s(t0+t)
11

относительно оси ординат. Умножив функцию s(t0–t) на коэффициент k , получаем импульсную характеристику согласованного фильтра.
1.4. Согласованный фильтр и корреляционный приемник
Пусть на вход согласованного фильтра воздействует принятое колебание x(t)= s(t, 0) + n(t). Тогда сигнал на выходе согласованного фильтра можно представить в виде
|
|
0 |
|
|
0 |
y(t) |
|
|
|
||
|
h (t τ)x(τ)dτ k |
|
s(t |
|
|
|
|
|
|
|
|
t
τ,λ)x(τ)dτ
.
(1.12)
Интеграл в этом выражении носит наименование корреляционного интеграла. Действительно, с точностью до постоянного множителя он представляет собой взаимную ковариационную функцию принятого колебания x(t) и копии полезного сигнала s(t, ).
Выражение (1.12) можно записать также в виде
|
|
|
|
kN |
q0s (t) q0n (t) , |
|
|
|
y(t) |
0 |
|||
|
|
2 |
||||
|
|
|
|
|
||
где |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
q |
(t) |
|
s(t |
t τ,λ)s(τ,λ )dτ |
||
|
||||||
0s |
|
N |
0 |
0 |
||
|
|
0 |
|
|
||
|
|
|
|
|||
– сигнальная функция;
(1.13а)
|
2 |
|
|
|
q0n(t) |
s(t0 t τ,λ)n(τ)dτ |
(1.13б) |
||
N0 |
||||
|
|
|
– шумовая функция.
Из соотношений (1.12) и (1.13а) следует, что полезный сигнал sв(t) на выходе согласованного фильтра с точностью до постоянного размерного множителя k равен ковариационной функции входного полезного сигнала
K( )
s(t)s (t
τ)dt
,
взятой от аргумента t –- t0 :
sв(t) = kK(t – t0), sв max(t0) = kEs . (1.14)
Следует также помнить, что в большинстве случаев фильтрации подвергаются высокочастотные сигналы (радиосигналы), у которых среднее значе-
12