

В формулах (5) величина n число шагов, задается перед началом вычислений. При k = n процесс вычислений заканчивается.
Теорема 3. Для задачи А метод n является единственным оптимальным последовательным методом на классе Q унимодальных функций. Наилучшая гарантированная точность множества последовательных методов Pn на классе Q равна
= b a .
Fn+2
Следствие. Кол-во необходимых при решении задачи А вычислений значений ф-и f(x) 2 Q гарантирующих погрешность6 " равно числу n, удовлетворяющему неравенствам
b a |
6 |
" |
6 |
b a |
(6) |
Fn+2 |
|
Fn+1 |
|||
7Метод ломаных
Предназначен для решения задач минимизации 1-ого и 2-ого типа для функций не являющихся унимодальными. Рассмотрим данный метод для класса функций, удовлетворяющих условию Липшица на отрезке и запишем определение. Говорят, что ф-я удовлетворяет условию Липшица на отрезке [a; b], если существует постоянная L > 0 такая, что
jf(x) f(v)j 6 L jx vj 8x; v 2 [a; b] (1)
Постоянную L называют константой Липшица. Геометрический смысл условия (1) следующий: угловой коэффициент
jf(x) f(v)j 6 L jx vj
для всех точек из [a; b]
7.1Описание метода ломаных
Пусть ф-я f(x) удовлетворяет условию 1 на отрезке [a; b]. Зафиксируем какую-либо точку v 2 [a; b] и определим ф-ю
g(x; v) = f(v) L jx vj
переменной x, причем a 6 x 6 b. g(x; v) кусочно-линейна на [a; b], график ее представляет собой ломаную линию, составленную из отрезков двух прямых, имеющие угловые коэффициенты L и пересекающихся в точке (v; f(v)). Кроме того в силу условия (1) выполняется неравенство:
f(x) g(x; v) > (L jf(x) f(v)j) jx vj > 0 (2)
jx vj
Покажем истинность левой части неравенства (2):
f(x) g(x; v) = f(x) f(v) + L jx vj
Запишем левую часть (2) в виде
f(x) f(v) + Ljx vj > (L jf(x) f(v)j)jx vj
jx vj
Отсюда следует, что
f(x) f(v) > jf(x) f(v)jjx vj
jx vj
т.е.
f(x) f(v) > jf(x) f(v)j
что выполняется всегда. Истинность левой части неравенства (2) доказана. Тогда из неравенства (2) следует, что
g(x; v) = f(v) Ljx vj 6 f(x) (3)
при всех x 2 [a; b]. Причем
13
g(v; v) = f(v)
Значит, график ф-и f(x) лежит выше графика ломанной g(x; v) при всех x 2 [a; b] и имеет с ней общую точку (v; f(v)).
Применение метода ломаных начинается с выбора произвольной точки x0 2 [a; b] и составления ф-и
g(x; x0) = f(x0) L jx x0j = p0(x)
Следующая точка x1 определяется из условия
p0(x1) = min p0(x)
x2[a;b]
ABC график p0(x) = g(x; x0). С самая нижняя точка.
A1B1 график g(x; x1)
ABС1B1 график следующей ф-и p1(x) A2B2C2 график ф-и g(x; x2)
ABD2B2E2B1 график ф-и p2(x) Очевидно, что следующая точка
x1 = a
или
x1 = b
Берется новая ф-я
p1(x) = max[g(x; x1); p0(x)]
и находится очередная точка x2 из условия
p1(x2) = min p1(x) x2 2 [a; b] и т. д.
x2[a;b]
Пусть точки x1; x2; :::; xn n > 1, составляется ф-я
pn(x) = max[g(x; xn); pn 1(x)] = max g(x; xi) i > 0
Следующая точка xn+1 определяется из условия
pn(xn+1) = min pn(x) xn+1 2 [a; b] (4)
x2[a;b]
Если min pn(x) достигается в нескольких точках, то в качестве xn+1 можно взять любую из них.
x2[a;b]
14

7.2Сходимость метода ломаных
Сходимость устанавливается следующей теоремой.
Теорема 4. Пусть f(x) произвольная ф-я, удовлетворяющая на отрезке [a; b] условию (1). Тогда последовательность fxng полученная с помощью метода ломаных такова, что
nlim f(xn) = nlim pn(xn+1) = f = x |
inf f(x) |
||
2 |
[a;b] |
||
!1 |
!1 |
|
|
причем справедлива оценка
06 f(xn+1) f 6 f(xn+1) pn(xn+1) (5)
последовательность fxng сходится к множеству X точек минимума ф-и f(x) на [a; b] т. е.
lim (X ; xn) = 0
n!1
7.3Определение константы L
При определении константы L может быть полезна следующая теорема.
Теорема 5. Пусть ф-я f(x) дифференцируема на отрезке [a; b] и ее производная f0(x) ограничена на этом отрезке. Тогда f(x) удовлетворяет условию (1) с константой
L = sup jf0(x)j
x2[a;b]
Док-во. По формуле конечных приращений (по ф. Тейлора) для 8x; v 2 [a; b] имеем
f(x) f(v) = f0(v + (x v))(x v)
где 0 < < 1. Отсюда из-за ограниченности производной f0(x) следует утверждение теоремы.
7.4Достоинства и недостатки метода ломаных
Достоинства:
Метод сходится при любом выборе начальной точки
Метод близок к оптимальным методам на классе ф-ий, удовлетворяющих условию (1). Недостатки:
С увеличением числа шагов n растет объем памяти компьютера для хранения координат вершин ломаной pn(x)
Метод невозможно реализовать без знания константы L
7.5Алгоритм метода ломаных при выборе начальной точки x0 = a
1. Выделим в кач-ве начальной точки левую границу интервала - a, тогда следующая точка будет
15

x0 = b
а следующая точка x1 и параметр p1 определяются из системы уравнений
(
(x1 a)L + p1 = f(a) (b x1)L + p1 = f(b)
Решив эту систему уравнений получим
x1 = 21L (f(a) f(b) + L (a + b))
|
p |
= 1 |
(f(a) + f(b) + L |
|
(a |
|
b)) (6) |
|
|
|
|||
|
1 |
2 |
|
|
|
|
|
|
|
|
|||
2. Вместо пары чисел x |
и p образуем новые пары чисел (x0 |
; p |
1 |
) и (x00 |
; p |
1 |
) |
||||||
1 |
1 |
|
|
|
|
|
1 |
|
1 |
|
|
||
|
|
|
x0 |
= x |
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
||
|
|
|
x00 |
= x + |
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
|
|
p1 = 12 (f(x1) + p1)
1 = 21L (f(x1) p1)
3.Из полученных двух пар (x01; p1) и (x001 ; p1) выбираем ту, у которой вторая компонента минимальна (в данном случае любую пару). Обозначим (x01; p1) как (x2; p2) и исключим из рассматриваемого множества точек
4.Вместо пары (x2; p2) добавляем две новые пары (x02; p2) и (x002 ; p2), компоненты которых находятся по формулам
x02 = x2 2
x002 = x2 + 2
p2 = 12 (f(x2) + p2)
2 = 21L (f(x2) p2)
5.Произвольный n-ый шаг. Из n полученных на предыдущих шагах пар выбираем ту, у которой вторая
компонента минимальна. Обозначим ее (xn; pn). Исключаем эту пару из рассматриваемого множества и добавляем вместо нее две новые пары чисел (x0n; pn) и (x00n; pn), где
pn = 12 (f(xn) + pn) n = 21L (f(xn) pn) (7)
6. Полагая
v = xn f = f(xn)
получим приближенное решение задачи минимизации. Погрешность определения равна
jf(v ) f j 6 2L n (8)
16
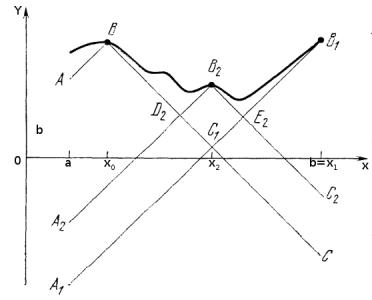
7.6Блок-схема метода ломаных
Входные параметры: a; b; L; " Выходные параметры: v ; f(v ); n
8Метод равномерного пассивного перебора для минимизации неунимодальных ф-ий L
Обозначим Q(L) класс функций удовлетворяющих условию Липшица (1) с одной и той же для всех функций этого класса константой L > 0. Для функций f(x) принадлежащих этому классу будем рассматривать задачу минимизации первого типа, когда ищется величина, равная точной нижней границе функции f(x) x 2 [a; b]. Для решения этой задачи будем пользоваться методами, которые заключаются в выборе точек x1; x2; :::; xn таких, что a 6 x1 6 x2 6 ::: 6 xn. Вычисляем значения функции f(x1); f(x2); :::; f(xn) и определяем
f(xk) = min f(xi)
16i6n
принимаемый за приближение f .
Как выбрать число n и точки x1; x2; :::; xn чтобы точная верхняя граница была
sup ( min f(xi) f ) 6 " (9)
f2Q(L) 16i6n
Простейшим методом для решения задачи (9) является следующий метод равномерного перебора, когда точки x1; x2; :::; xn выбираются по правилу (10)
17

x1 = a + h2
x2 = x1 + h
...
xi = xi 1 + h
xi+1 = xi + h
или
xi+1 = x1 + ih
...
xn 1 = x1 + (n 2)h xn = min(x1(n 1)h; b)
где
h 6 2L"
шаг метода.
18