

8. Основы теории проектирования трассы автомобильной дороги (уравнение движения автомобиля).
Фактический режим движения автомобиля по дороге зависит от ряда факторов: эксплуатационные свойства автомобиля, дорожные условия, индивидуальные особенности водителя. При проектировании с точки зрения удобства и экономичности нужно учитывать все эти факторы в комплексе.
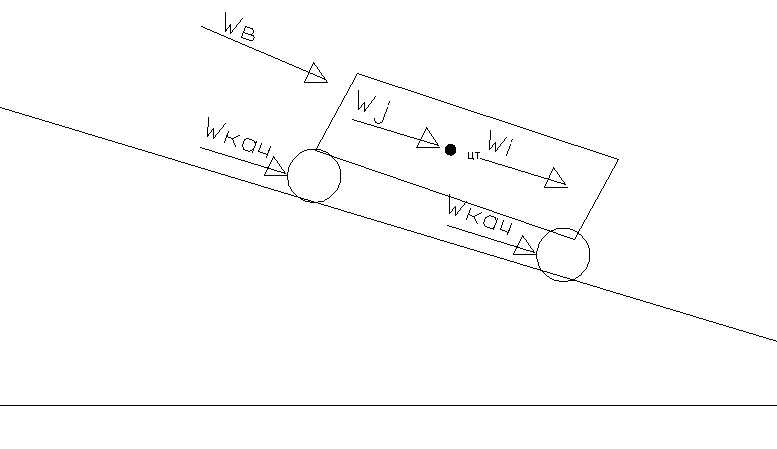
Рассмотрим общий случай движения на подъём действует: сила сопротивление качению Wкач, сила сопротивление движения на подъём Wi, инерционные силы автомобиля и вращающихся масс, возникающие при изменении скорости движения Wj, сила воздушного сопротивления Wв.
Силы сопротивления качению и воздуха всегда действуют на автомобиль. Сопротивления движения на подъём и инерционные силы могут иметь отрицательный знак или вообще отсутствовать при спуске или торможении
![]()
Динамический фактор характеризует тяговые качества а/м, запас тягового усилия на единицу веса а/м, движущегося со скоростью v, который может быть израсходован на преодоление дорожных сопротивлений f ± i и на ускорение а/м j.
D = (F - Wв)/G = f ± i ± j.
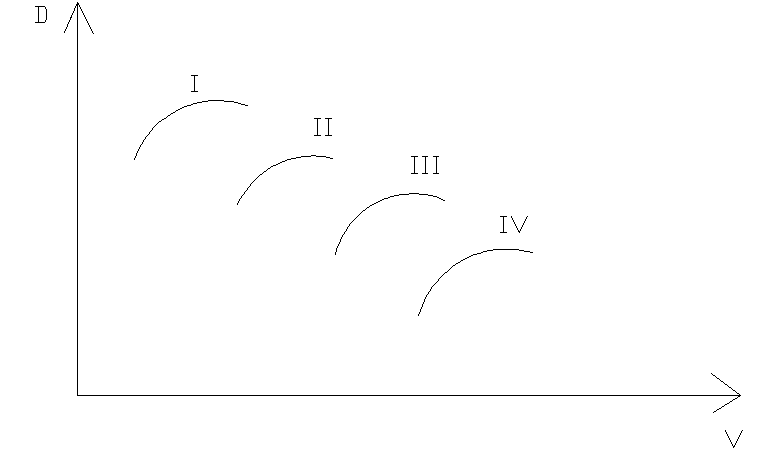
График зависимости динамического фактора от скорости движения при полной нагрузке на а/м называется динамической характеристикой.
I, II, III, IV –номер передачи.
9. Особенности проектирования переходных кривых на транспортных развязках.
Существуют 2 типа кривых:
Клотоида
Тормозная кривая
Тормозная кривая
Особенность заключается в том что нужно сбросить скорость на съезде. Для входа на кривую скорость должна быть 0.8V. Предусматривают переходно-скоростные полосы где скорость должна быть около 70 км/ч. ПСП отделяют движение на съезд от основного потока.

Длина
тормозной кривой рассчитывается как
![]()
a-ускорение торможения около 1.5 м\С2 .
V-расчётная скорость.
Если дорога III-категории, то V=100 км/ч V1=0.8V=80км/ч что близко к V2, а следовательно можно использовать обычную клотоиду.
При установлении длины переходной кривой следует иметь в виду, что она не должна быть меньше расчетной длины отгона виража, так как переходная кривая и отгон виража должны быть совмещены. В случае применения клотоиды необходимо предварительно установить ее параметры: радиус основной кривой R и длину переходной кривой L
10. Расчетные схемы (формулы) определения расстояний видимости в плане и профили.
Расчётное расстояние видимости используется в плане и в профиле.
Расстояние видимости в продольном профиле определяют по двум схемам:
Схема 1. Автомобиль встречает препятствие на той же полосе движения и должен остановиться перед ним (схема одиночного торможения).
![]() .
.
Схема 2. Автомобиль встречает другой автомобиль на той же полосе движения, и оба должны затормозить, не доезжая друг до друга на расстояние l0.
![]() .
.
где К - коэффициент эксплуатационных условий торможения принимаем в обычных условиях 1,2, для трудных условий 1,4;
φ - коэффициент сцепления колеса автомобиля с дорогой в продольном направлении, для нормального состояния асфальтобетонных покрытий φ=0,5;
i - продольный уклон дороги, принимаемый при определении расстояния видимости как величины нормативной равный нулю;
lo – расстояние запаса, равное 5-10 м.
Это расстояние видимости так же используется и в плане. Расстояние видимости в плане на кривых в плане при наличии помех на внутренней части кривых измеряют по внутренней траектории движения глаза водителя.
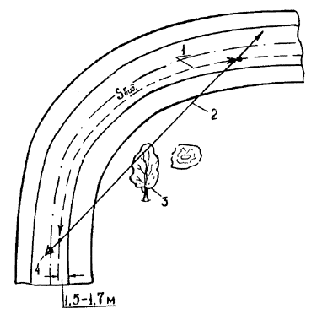
Рис. 2.4. Схема определения видимости на кривой в плане:
1 ¾ траектория движения глаза водителя, по которой измеряют расстояние видимости; 2 ¾ хорда линия взгляда водителя наблюдателя; 3 ¾ помеха на внутренней части кривой; 4 ¾ глаз наблюдателя и точка отсчета расстояния видимости Измерения выполняют два человека.
В начале кривой на траектории движения глаза водителя делается отметка на покрытии. В этой точке останавливается первый наблюдатель. Второй наблюдатель перемещается по траектории движения глаза водителя до тех пор, пока первый наблюдатель не укажет ему место остановки над последней точкой на покрытии, которую он видит со своего места наблюдения. Второй наблюдатель делает отметку на покрытии и возвращается назад. Затем они вместе измеряют рулеткой отрезками. Если есть помехи в зоне видимости, которые могут спровоцировать опасную ситуацию, то убирают препятствие(дерево) или снижают скорость движения на этом участке