

. Сложное движение точки

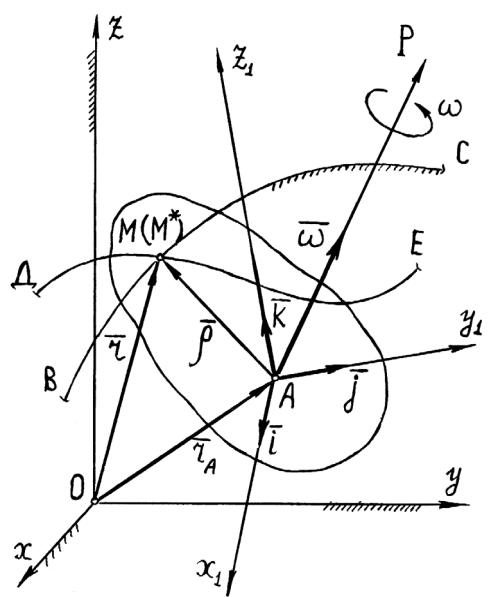
•Движение, совершаемое точкой М по отношению к подвижной системе координат , называется относительным движением.
•Движение, совершаемое подвижной системой координат и всеми неизменно связанными с ней точками по отношению к неподвижной системе координат Охуz , называется переносным движением.
•Движение, совершаемое точкой М по отношению к неподвижной системе координат Охуz , называется абсолютным или сложным. Траектория ВС точки в этом движении называется абсолютной траекторией, а скорость и ускорение – абсолютной скоростью и абсолютным ускорением.
V VOTH VПЕР
При сложном движении точки ее абсолютная скорость равна геометрической сумме относительной и переносной скоростей.
•При сложном движении точки ее абсолютное ускорение равно геометрической сумме относительного ускорения, переносного ускорения и ускорения Кориолиса
ааотн апер акор
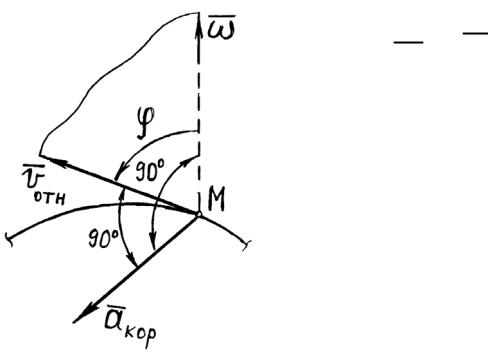
акор 2 VOTH
Вектор акор перпендикулярен к плоскости, содержащей векторы и Vотн. Вектор
направлен в ту сторону, откуда переход вращением от вектора к вектору на наименьший угол виден происходящим против хода часовой стрелки.
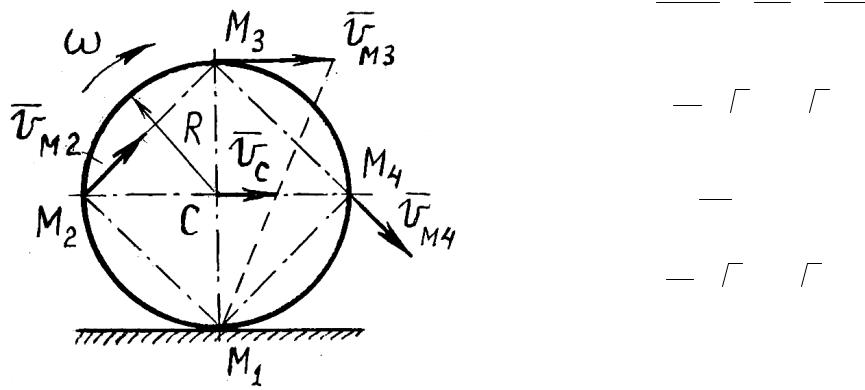
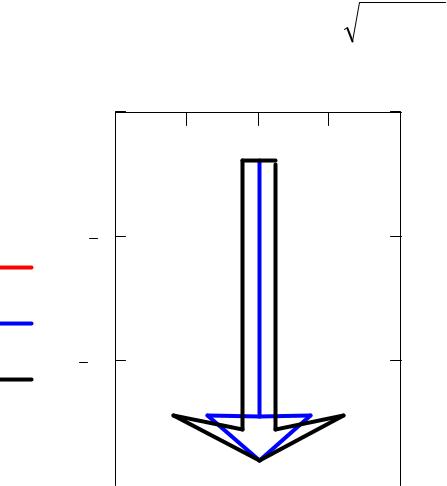
•Колесо радиуса R = 0,6 [м] катится без скольжения по прямолинейному участку пути; скорость его центра С постоянна и равна VС = 12 [м/с].
•Найти угловую скорость колеса и скорости концов М1, М2, М3, М4 вертикального и горизонтального диаметров колеса.
•Колесо совершает плоско – параллельное движение. Мгновенный центр скоростей колеса находится в точке М1 контакта горизонтальной плоскости, то есть VМ1 = 0
CMVC 1 VRC 012,6 20
VM 2 M 2 M1 VRC R 2 VC
2 VC  2 16,92
2 16,92
VM 3 M 3 M1 VRC 2r 2VC 24
VM 4 M 4 M1 VRC R 2 VC
2 VC  2 16,92
2 16,92
|
|
|
|
|
|
VM 2 M 2 M1 |
|
|
|
||
VM 3 M 3 M1 |
|||||
КИНЕМАТИКА ТОЧКИ
По заданным уравнениям движения точки М х=х(t). у=у(t) найти траекторию точки, а также для заданного момента
времени t = t1 найти положение точки на ее траектории,
определить и построить векторы скорости, нормального, касательного и полного ускорений, вычислить радиус
кривизны в соответствующей точке траектории.
Исходные данные для расчета; приведены в табл. 1.
|
№ |
|
х=х(t), cм |
|
|
|
|
у=у(t), см |
|
|
|
|
Время |
||||
|
варианта |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
t1 ,с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1.7 |
|
2t |
|
|
|
|
4t-6t2 |
|
|
|
|
1 |
||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
Чтобы получить уравнения траектории точки в координатной форме, исключим время t |
||||||||||||||||
из уравнений ее движения |
|
|
|
|
|
|
|
|
|
3х2 |
|||||||
|
t |
|
х |
|
х |
|
|
х 2 |
у 2 |
х |
|||||||
|
|
|
|
у 4 |
|
|
6 |
|
|
|
|
|
|||||
|
2 |
|
|
|
2 |
|
|
||||||||||
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|||||
.
Уравнение траектории точки представляют собой уравнение параболы
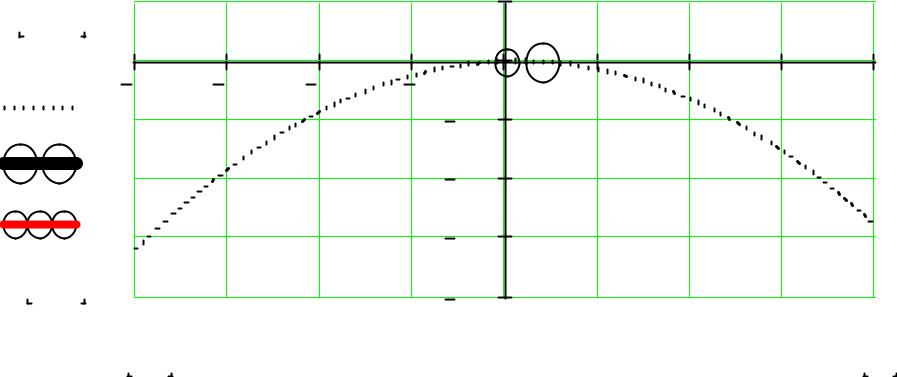
.
Уравнение траектории точки представляют собой уравнение параболы
0.666 |
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y( t) |
20 |
15 |
10 |
5 |
0 |
5 |
10 |
15 |
20 |
y( t1) |
|
|
|
|
200 |
|
|
|
|
y( t2) |
|
|
|
|
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
600 |
|
|
|
|
640 |
|
|
|
|
800 |
|
|
|
|
|
20 |
|
|
|
x( t) x( t1) x( t2) |
|
|
|
20 |
|
|
|
|
|
|
|
|
|
построен по составляющим Vх1 и Vу1 ; этот вектор совпадает по направлению с |
|||||||||||||||||
направлением касательной к траектории. |
|
|
|
|
|
|
|||||||||||
|
|
|
|
1.8 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
VX |
( |
t1 |
) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
VY |
( t1 |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
V |
( t1 |
) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M |
1 |
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
15 |
1 |
1.5 |
2 |
|
2.5 |
3 |
3.5 |
|
4 |
4.5 |
5 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1.4 |
VX |
( t1 ) |
0 |
VY ( t1 ) |
0 |
V ( t1 ) |
0 |
M |
0 |
5 |
|
|
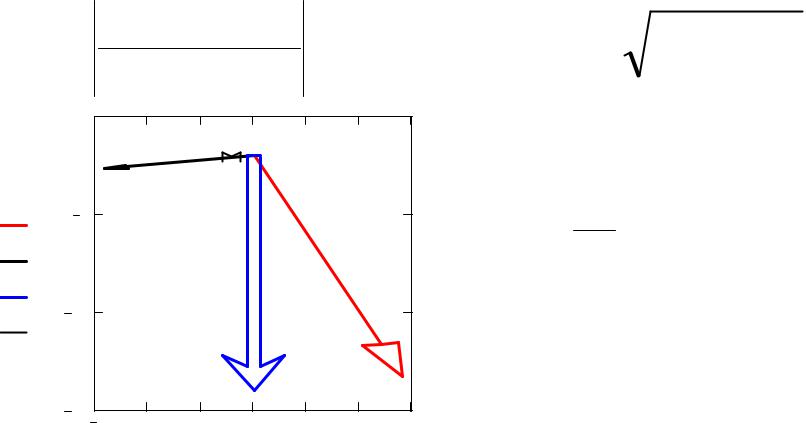
На рис. |
выполнено построение векторов скорости точки по формулам. |
||||||||||||||
|
|
|
V1 Vx21 Vy21 |
Vx x 2 |
Vy y 4 |
12t |
Вектор V построен по составляющим Vх1 и Vу1 ; этот вектор совпадает по направлению с направлением касательной к траектории.
На рис. выполнено построение векторов ускорения точки.
|
|
|
|
а1 аx21 аy21 12 |
ax x |
0 |
ay y |
12 |
.
AX(t1) 1
AYt1( ) 1
A(t1) 1
0
5
10
|
15 |
|
|
|
|
|
|
|
|
|
|
1 |
1.5 |
2 |
2.5 |
3 |
|||||||
|
|||||||||||
AX(t1) 0 AYt1() 0 A(t1) 0
|
Касательное и нормальное ускорения точки при t1 получены по уравнениям: |
|||||||||||||||||
a 1 |
|
ax1Vx1 ay1Vy1 |
|
|
[см/с2] |
a |
n1 |
a2 |
a2 |
2 |
||||||||
|
|
|
|
|
V1 |
|
|
|
|
|
|
|
|
1 |
1 |
[см/с ]. |
||
|
|
0 |
|
|
|
|
|
|
|
|
|
Радиус кривизны траектории при t1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
At( t1) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
1 |
V1 |
[см]. |
|
|||
AN( t1) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
an1 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A1( t1) |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M 1 |
|
10 |
|
|
|
|
|
|
|
|
|
Радиус кривизны траектории, см |
(t1) 23.364 |
|||||
|
|
15 |
1 |
0 |
|
1 |
2 |
|
3 |
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|
At( t1) |
0 |
AN( t1) |
0 |
A1( t1) |
0 |
M 0 |
|
|
|
|
|
|
|
|
Тангенциальное ускорение точки |
A (t1) |
|
11.642 |
|
|
|
|
Нормальное ускорение точки |
|
|
An(t1) 2.91 |
№ |
х=х(t), cм |
у=у(t), см |
Время |
варианта |
|
|
t1 ,с |
|
|
|
|
К1.12 |
2sin( t/6)-4 |
3cos( t/6) |
2 |
|
|
|
|
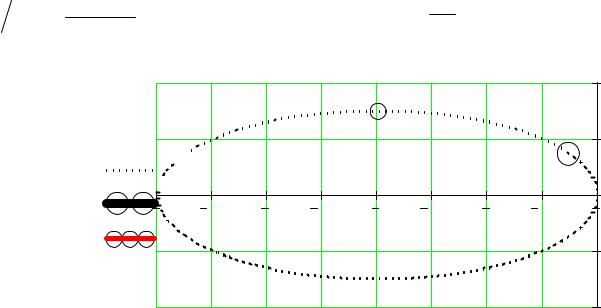
sin πt 6 x 4 2
cos πt 6 3у
6 3у
(x 4)2 y 2 1 22 32
;
y( t) 
 ; y( t1)
; y( t1) 

6 |
5.5 |
5 |
4.5 |
4 |
3.5 |
3 |
2.5 |
2 |
y( t2)
.
x( t) x( t1) x( t2)

Колесо, имеющее неподвижную ось вращения, получило начальную угловую скорость 4 с-1 . Сделав 20 оборотов, оно вследствие трения в подшипниках, остановилось. Определить угловое ускорение колеса, считая его постоянным, а также время вращения колеса до остановки.
Для равнозамедленного вращательного движения колеса имеем зависимости
0 t
0 0t 12 t 2
По условию задачи имеем (φ0 = 0; ω0 = 4 с-1 ; =0. )
4 Т
4 Т 12 Т2
где Т – время, в течение которого колесо совершило 20 оборотов, φ – угол поворота колеса при t = Т.

Из условия остановки колеса ( =0) получаем
4 4
ТТ
|
|
4 Т |
1 |
Т2 |
4 Т 2 Т 2 Т |
|
||||||
|
|
|
||||||||||
|
|
|
|
2 |
Угол поворота |
колеса при t = Т и N = 20 оборотов |
||||||
|
|
|
|
|
|
|
||||||
|
2 N 40 |
[рад] . |
|
|
|
|
||||||
|
|
|
|
Вычислим время Т и угловое ускорение ε колеса |
|
|||||||
Т |
|
|
|
40 |
20 |
[с]; |
|
4 |
0.2 |
[с-2]. |
||
|
2 |
|
||||||||||
|
|
|
||||||||||
|
|
|
2 |
|
20 |
|
|
|||||
ПЛОСКО-ПАРАЛЛЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
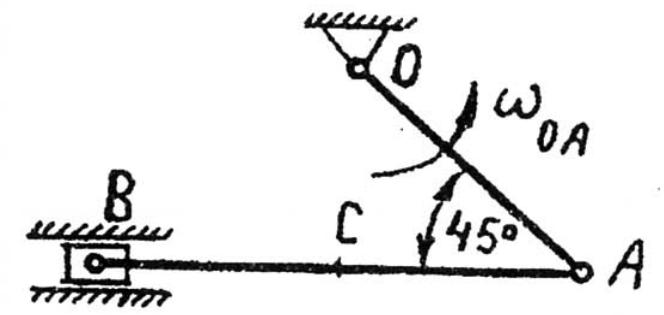
Для заданного положения механизма найти скорости точек В и С, а также угловую скорость звена, которому принадлежат эти точки. Схемы механизмов и необходимые для расчета данные показаны на рис.
ОА=30см, АВ=50см, АС=25см,
ОА=3с-1 .
Решение
Кривошип ОА совершает вращательное движение, шатун АВ – плоско-параллельное движение.
Находим скорость точки А звена ОА :
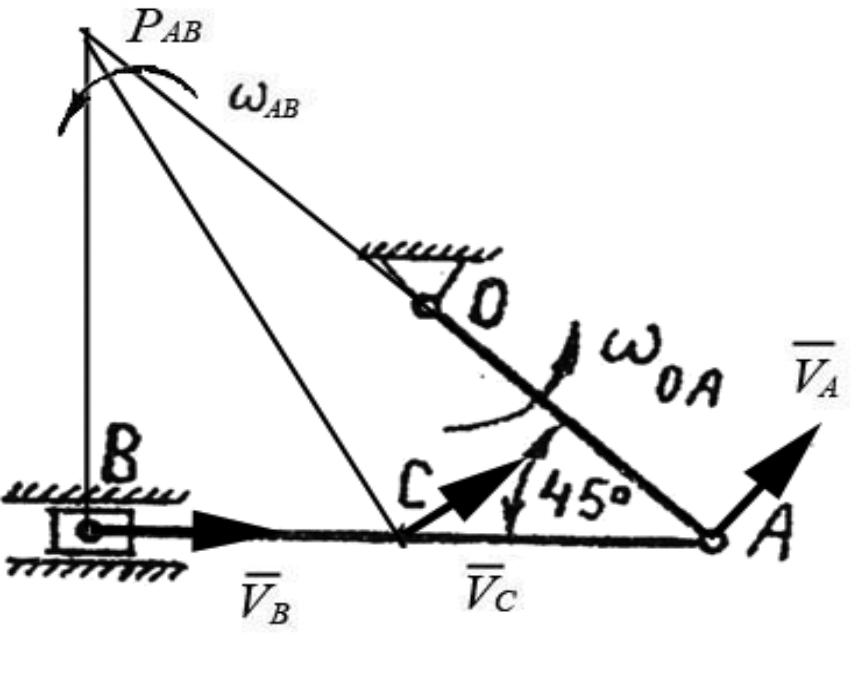
vA OAOA 3 0,3 0,9мс 1 |
vА ОА |
.
Скорость точки В направлена по горизонтали. Зная направление скоростей точек А и В шатуна АВ, определяем положение его мгновенного центра скоростей – точку РАВ.
|
АВ |
|
vA |
|
0,9 |
1.3c 1 |
АР |
АВ |
АВ |
2 0.5 1.4 0.7м |
||
АР |
АВ |
0,7 |
||||||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
, |
|
|
|
|
|
||
v |
B |
|
BP 1.3 0,5 0,65мс 1 |
ВР |
АВ |
АВ 0.5м |
|
|
AB AB |
|
|
.
Расстояние СРАВ находим по теореме Пифагора.
СРАВ  (ВРАВ )2 (ВС)2
(ВРАВ )2 (ВС)2  0,52 0,252 0,56м
0,52 0,252 0,56м
;
Для заданного положения механизма скорость точки С равна
, |
|
0,73мс 1 |
|
vC АВCPАВ 1,3 |
0,56 |
vС СРАВ |
|
; |
|
|
|
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
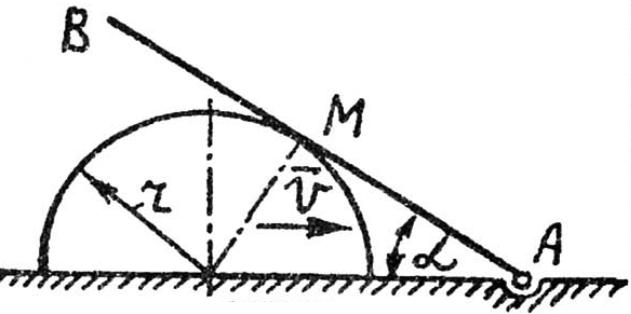
Тело в виде полуцилиндра скользит по горизонтальной плоскости со скоростью V = 0.2 м с-1, поворачивая шарнирно закрепленный в точке А стержень АВ . Определить относительную скорость точки касания М стержня АВ, если угол = 30°.
Абсолютное движение точки M – движение полуцилиндра, который скользит по горизонтальной плоскости. Разложим это движение на два движения.
Движение точки M вдоль стержня АВ, является относительным. Движение точки М вместе со стержнем во вращательном движении
относительно точки А представляет собой переносное движение.
Абсолютная скорость точки М |
v vотн |
vпер , |
|
|
Определим относительную скорость точки касания М стержня АВ, если угол
= 30°:
vотн v cos 30o 0,2 0,87 0,17 мс 1