

КИНЕМАТИКА
 Кинематически задать движение или закон движения тела – это значит задать положение данного тела или точки относительно некоторой системы отсчета в любой момент времени.
Кинематически задать движение или закон движения тела – это значит задать положение данного тела или точки относительно некоторой системы отсчета в любой момент времени.
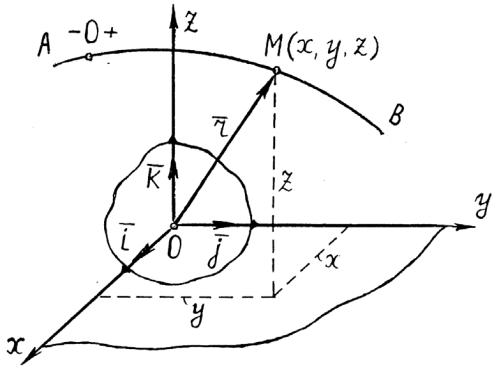
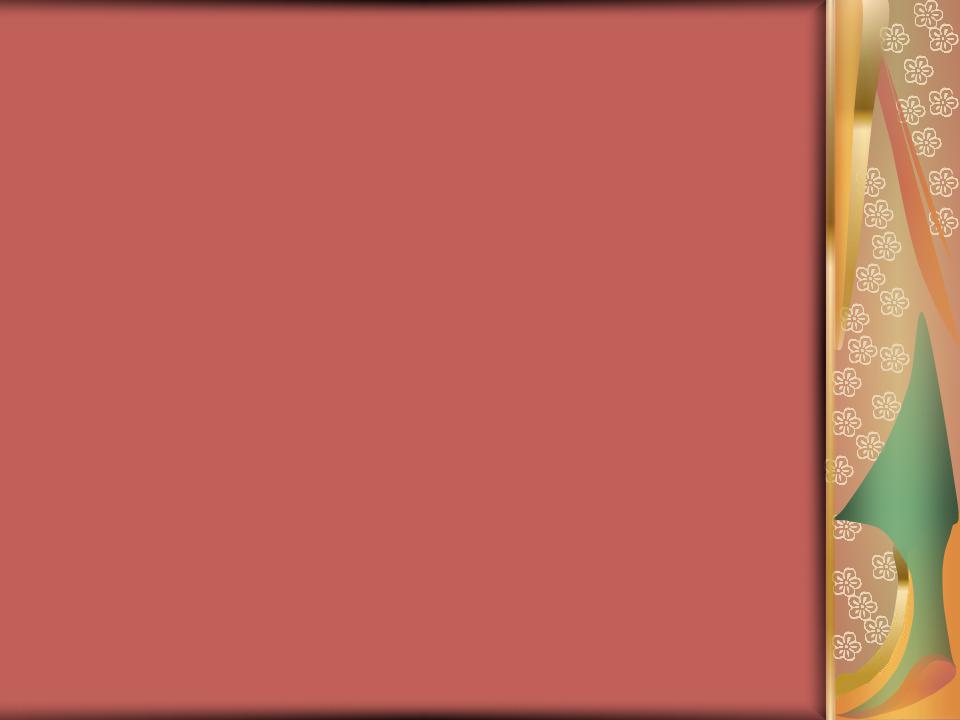
Три способа задания движения точки
• Положение этой точки в любой момент времени можно определить с помощью радиус-вектора от начала координат до самой движущейся точки; . При движении точки изменяется
направление и величина радиус-вектора в течение времени t; |
|
следовательно |
r r (t ) |
•Положение точки М можно установить при помощи ее декартовых координат (х, у, z), изменяющихся в
течение времени
• х = х (t); у = у (t); z = z (t)
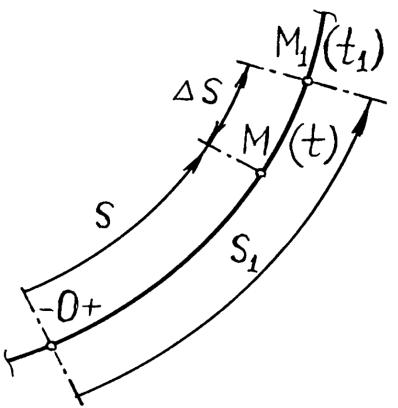
•Примем траекторию точки за криволинейную
координатную ось. Положение точки на траектории
можно однозначно определить при помощи
криволинейной (дуговой) координаты s, которая
равна расстоянию от некоторой произвольной точки
– О' + до точки М, измеренному вдоль дуги
траектории; . Движение точки подчиняется
зависимости s = s (t),
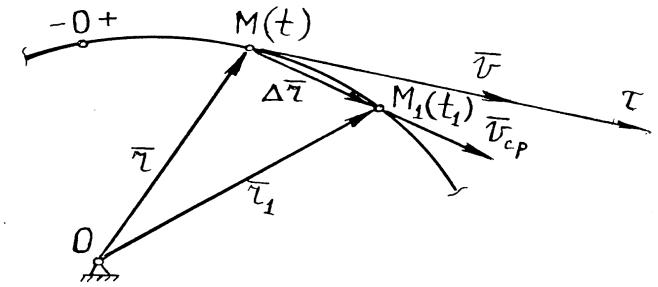
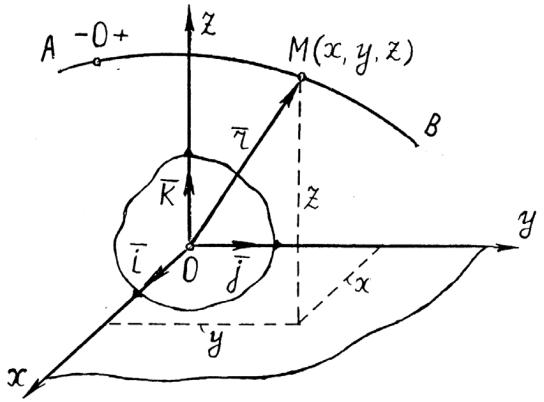
• Вектор скорости точки
|
|
|
|
|
|
|
|
|
|
|
|
Так как предельным |
|
|
|
|
|
|
|
|
|
|
|
|
|
направлением секущей ММ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
является направление |
|
|
|
|
|
|
|
|
|
|
|
|
|
касательной, то вектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
скорости точки в данный |
|
|
|
|
|
|
|
r |
|
dr |
|||||
|
|
|
|
|
|
|
|
момент времени направлен по |
|||||
V |
lim VCP |
lim |
|
||||||||||
t |
dt |
|
касательной к траектории в |
||||||||||
|
|
t 0 |
t 0 |
|
|
сторону ее движения. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
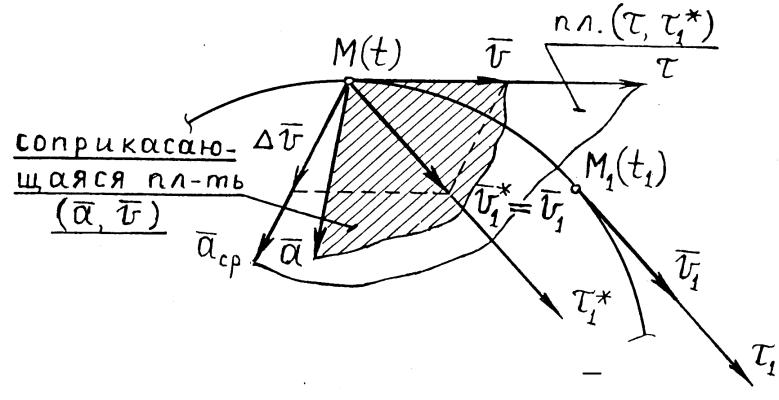
• Вектор ускорения точки
|
|
|
|
|
|
|
|
|
|
|
d 2 |
|
|
|
а lim а |
CP |
lim |
V |
|
|
dV |
|
|
r |
|
||||
t |
|
dt |
|
dt |
2 |
|
||||||||
t 0 |
t 0 |
|
|
|
|
|
||||||||
вектор ускорения точки лежит в соприкасающейся плоскости и направлен в сторону вогнутости траектории.
•Проекции скорости точки на оси координат равны производным от соответствующих координат точки по времени.
Vx x dx |
Vy |
y dy |
V z |
|
z dz |
||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
dt |
|
dt |
|
|
dt |
|
|
|
Проекции ускорения точки на оси координат равны вторым производным от соответствующих координат точки по времени.
|
|
d |
2 |
x |
|
dVx |
|
аx x |
|
|
|
||||
dt 2 |
dt |
||||||
|
|
|
|||||
• Дана траектория точки и закон движения точки вдоль ее траектории в виде s = s (t).
V limV |
lim |
s |
|
ds |
|
t |
dt |
||||
t 0 CP |
t 0 |
|
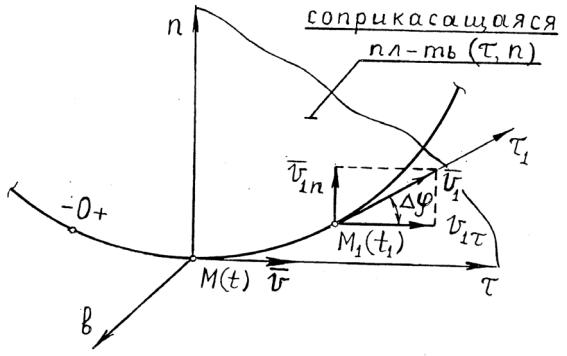
•При естественном способе задания движения точки вектор ускорения точки определяется по его проекциям на оси подвижной системы координат Мτnb, которые имеют начало в самой точке и движутся вместе с ней
а |
lim |
V1 V |
lim |
V1 cos V |
аn lim |
V |
V |
|
|
V sin |
|
|
|
1n |
|
n |
lim |
1 |
|
||||
t |
t |
|
|
||||||||
|
t |
|
t |
|
|||||||
|
t 0 |
t 0 |
t 0 |
|
|
t 0 |
|

•Угол между касательными к траектории в точках М и М1 называется углом смежности.
•Предел отношения угла смежности к длине дуги определяет кривизну К траектории в точке М.
K lim d 1
S 0 s ds
|
|
|
а lim |
V1 cos V |
|
dV |
|
|
|
||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
t 0 |
|
t |
|
|
|
dt |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
V sin |
|
|
|
|
|
sin |
|
|
|
s |
|
V 2 |
||
а |
n |
lim |
1 |
|
lim V |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||||||||||
|
|
t |
|
|
|
1 |
|
|
s |
|
|
|
|
||||
|
|
t 0 |
|
|
|
|
|
|
|
t |
|
||||||
lim V V |
lim |
sin |
1 |
lim |
1 |
lim |
s |
|
V |
|
|
|
|
||||||||
t 0 1 |
t 0 |
|
t 0 |
s |
|
t |
|
|||
|
( 0) |
( s 0) |
t 0 |
|
|
|||||
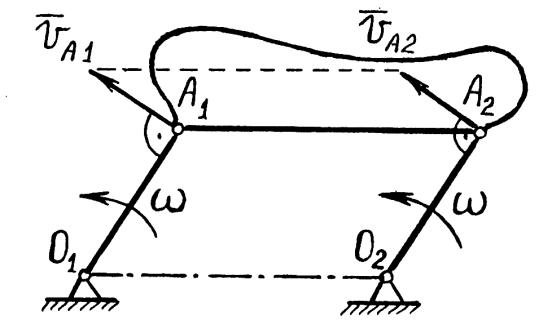
•Поступательным называется такое движение, при котором отрезок прямой, соединяющей две любые точки тела, перемещается параллельно самому себе.
При поступательном движении все точки тела описывают одинаковые (при наложении совпадающие) траектории и имеют в любой момент времени соответственно геометрические равные скорости и ускорения.
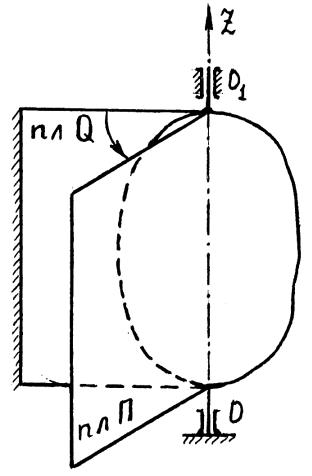
•Вращательным называется такое движение тела, при котором все точки некоторой прямой этого тела остаются во все время движения неподвижными. Прямая, проходящая через неподвижные точки тела, называется осью вращения. Все точки тела, не принадлежащие оси вращения, описывают окружности, плоскости которых перпендикулярны к этой оси.
•Основными кинематическими характеристиками вращательного движения тела являются его угловая скорость ω и угловое ускорение ε.
•Угловая скорость тела равна производной по времени от угла поворота тела
d dt
d dt
Угловое ускорение тела равно производной по времени от угловой скорости тела
S = R φ = R φ(t).
•Линейная или окружная скорость точки
V dsdt dtd R R ddt R
Ускорение точки
а |
|
dV |
R |
a |
|
|
V 2 |
2 R |
|
n |
|
||||||
|
|
dt |
|
|
R |
|
||
|
|
|
|
|
|
|||
a a2 |
a2 |
R 2 4 |
|
n |
|
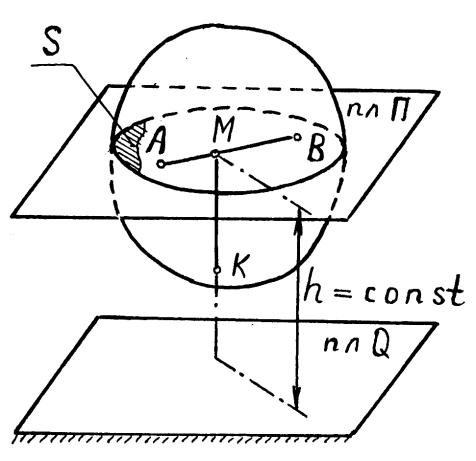
•Плоско – параллельным или плоским называется такое движение тела, при котором все его точки перемещаются в плоскостях, параллельных некоторой неподвижной плоскости.
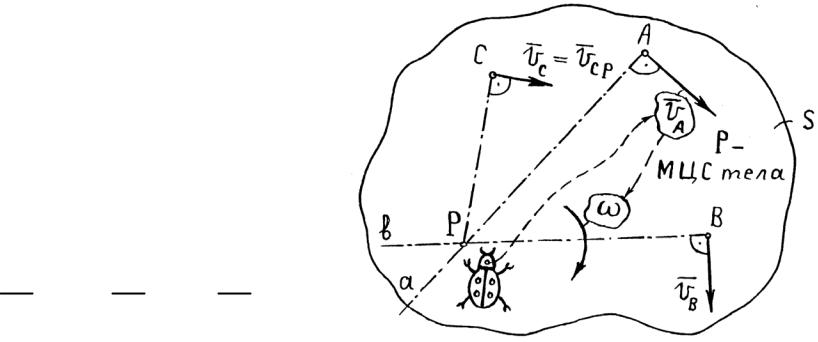
•Мгновенным центром скоростей (МЦС) называется точка тела, скорость которой в данный момент времени равна нулю.
•Пусть в некоторый момент времени точки А и В тела имеют и , не параллельные друг другу
VB VA VBA
скорость любой точки тела равна ее скорости во вращательном движении вместе с телом вокруг мгновенного центра скоростей. Скорости точек тела пропорциональны их расстояниям до мгновенного центра скоростей