

Теорема об изменении кинетического момента
•Кинетическим моментом материальной точки относительно некоторого центра называется векторный момент количества движения точки относительно этого центра
•ko mo (mV ) r mV ,
Кинетический момент материальной системы относительно центра
Ko mo (mkVk ) rk mkVk
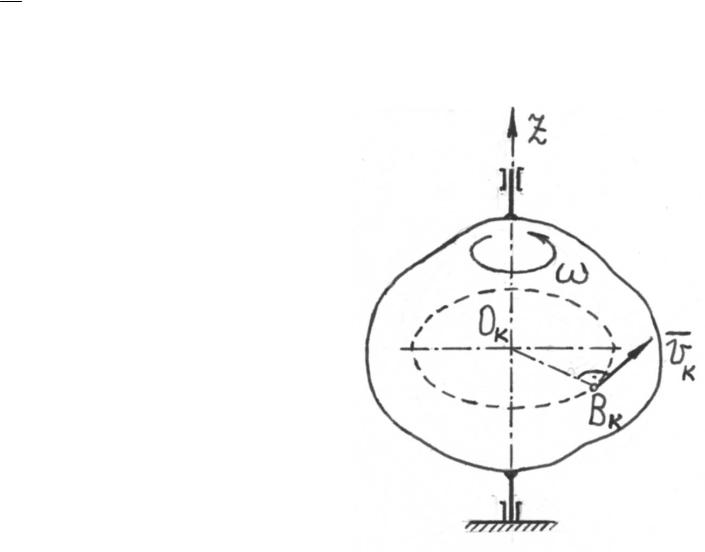
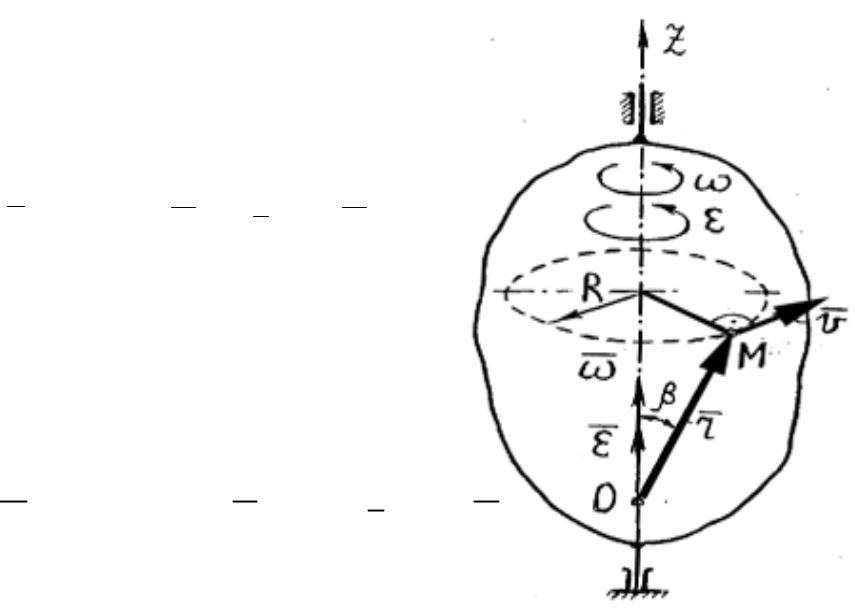
Кинетический момент относительно оси вращения при вращательном
движении твердого тела
K z m z (mkVk ) (mkVk ) kz (mk kz ) kz m k kz 2 I z ,
Kz Iz
•Кинетический момент тела относительно оси равен произведению угловой скорости тела на момент его инерции относительно оси вращения. Знак кинетического момента относительно оси вращения совпадает со знаком угловой скорости тела вокруг этой о
Теорема об изменении кинетического момента
d |
|
o |
mo ( |
|
|
dK z |
mz ( |
|
|
|
K |
||||||||||
Fke ); |
Fke ). |
|||||||||
|
|
|
|
|||||||
dt |
dt |
|||||||||
•Производная по времени от кинетического момента системы относительно центра равна сумме моментов, действующих на систему, внешних сил, относительно этого же центра.
Дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси
|
d |
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
e |
) |
|
|
|
Iz mz (Fk |
) |
||||
|
|
|
|
|
|
||||||||
Iz dt |
mz (Fk |
|
|
|
|
||||||||
|
|
|
|
|
|
d 2 |
|
d |
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
dt 2 |
dt |
|
|
||||||
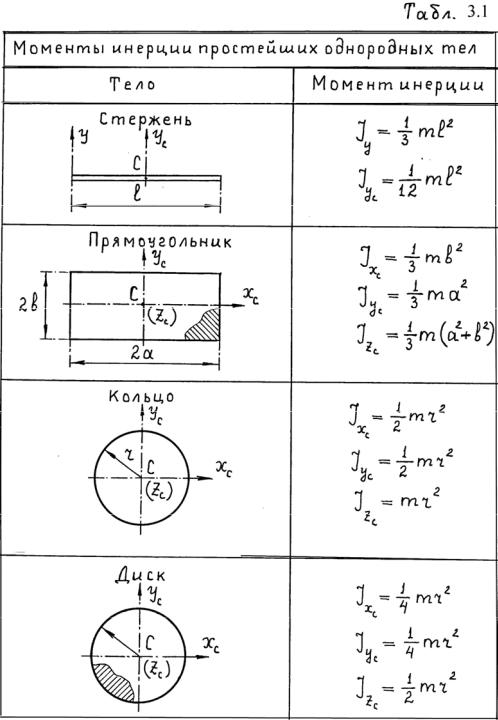
. Моментом инерции тела относительно оси называется сумма произведений масс всех точек тела на квадраты их расстояний до данной оси
IZ mK KZ2 mK (xK2 yK2 )
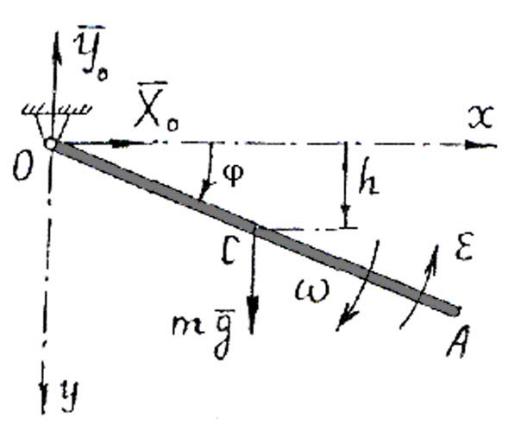
•Тонкий однородный стержень массы m и длиной OA=l может вращаться без трения вокруг горизонтальной оси О . В начальный момент времени стержень отведен в горизонтальное положение и отпущен без начальной скорости. Определить угловую скорость и угловое ускорение стержня, когда он повернется на угол .
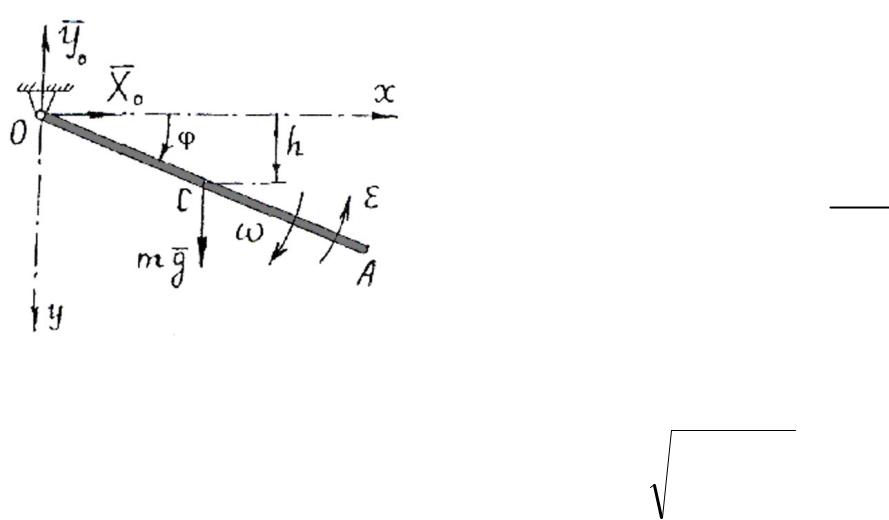
к стержню приложены силы: вес mg и реакции
неподвижного шарнира X 0 Y0 • вращательное
движение стержня
воспользуемся заменой |
d |
||||
d |
|||||
|
|
|
|
||
|
d |
|
3g cos |
2 |
|
d |
2l |
2 |
|||
|
|
||||
•за центр момента выбираем ось вращения стержня (точку О)
|
|
l |
|
|
J |
|
J mg 2 cos |
||||||
|
||||||
|
3mgl cos |
|
3g cos |
|||
|
2ml 2 |
|
2l |
|||
|
3g sin |
|
3g sin |
|
|
|
|
||
2l |
l |
|||
|
||||
ml2
3
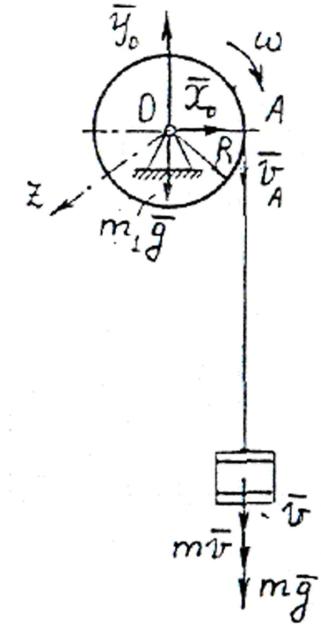
•Груз массой m подвешен на тросе, навитом на барабан массой m1 с горизонтальной осью вращения. Пренебрегая потерями на трение и считая барабан сплошным однородным цилиндром, определить ускорение груза.

•Система состоит из двух подвижных тел: барабана, движущегося вращательно, и груза, движущегося поступательно. Для решения задачи будем использовать теорему об изменении кинетического момента в дифференциальной форме: dK nM M внешj
dt
|
V |
m |
|
||
|
|
Kz J z mVR |
1 |
m VR |
|
R |
2 |
||||
|
|
|
|||
nM |
|
m |
|
dV |
|
||||
|
|
внешj |
mgR |
|
1 |
m R |
|
mgR |
|
M |
|
||||||||
2 |
dt |
||||||||
j 1 |
|
|
|
|
|||||
a dV |
|
2mg |
dt |
|
m 2m |
|
|
1 |