

меренные углы. По исправленным углам вычисляют дирекционные углы всех сторон каждого хода и затем - приращения координат по всем сторонам ходов.
По приращениям координат вычисляют координаты узловой точки по каждому ходу в отдельности и получают три значения координаты X и три значения координаты Y узловой точки.
Средневесовые значения координат подсчитывают по формулам:
|
Х1 / ∑S1 + Х2 /∑S2 + Х3/∑S3 |
|
Хузл = |
; |
(13.6) |
|
1 / ∑S1 + 1/ ∑S2 + 1 / ∑S3 |
|
Y1 / ∑S1 + Y2 /∑S2 + Y3/∑S3
Yузл = |
|
1 / ∑S1 + 1/ ∑S2 + 1 / ∑S3 . |
(13.7) |
Считая узловую точку исходным пунктом с известными координатами, вычисляют координатные невязки для каждого хода в отдельности и вводят поправки в приращения координат по сторонам ходов. По исправленным приращениям координат вычисляют координаты пунктов всех ходов.
Рассмотренная упрощенная обработка системы линейно – угловых ходов с од-
ной |
узловой точкой состоит из двух этапов: получение дирекционного угла узло- |
вого |
направления и координат узловой точки и обработка каждого хода в отдель- |
ности.
13.5.Геодезические засечки
13.5.1.Полярная засечка
Вполярной засечке (рис. 13.6) исходными данными являются: координаты XA, YA пункта A и дирекционный угол αAB направления AB, измеряемыми элеменатами являются горизонтальный угол β (средняя квадратическая погрешность измерения угла mβ) и расстояние S, относительная погрешность его измерения mS / S
=1 / T ), искомые элементы ‒ это координаты X, Y точки P.
Решение производится по формулам прямой геодезической задачи.
Рис. 13.6. Полярная засечка
Сначала рассмотрим так называемый общий случай прямой угловой засечки, когда углы β1 и β2 измеряются на двух пунктах с известными координатами, каждый от своего направления с известным дирекционным углом αАС и αBD (рис.
13.7).
Рис. 13.7. Прямая угловая засечка общий случай
Исходные данные: координаты пунктов А и В ‒ ХА, YА; ХВ, YВ; дирекцион-
ные углы αАС и αBD.
Измеряемые величины: углы β1 и β2;
Искомые элементы: координаты ( X P, YP) точки Р. Решения. Возможны графическое и аналитическое решения
Графическое решение. На масштабированном чертеже от направления AC сле-
дует |
отложить с помощью транспортира угол β1 и провести прямую |
|
линию AP; от направ- |
ления BD отложить угол β2 и провести прямую |
|
линию BP ; точка пересечения этих прямых является искомой точкой P.

Аналитическое решение. Приведем алгоритм варианта, соответствующий общему случаю засечки:
1. Вычислить дирекционные углы αСА и αDВ линий СA и DВ:
αСА = arc tg (YА ‒YС) / (ХА ‒ ХС); |
(13.8) |
αDВ = arc tg (YВ ‒YD) / (ХВ ‒ ХD); |
(13.9) |
2. Вычислить дирекционные углы линий АР и ВР
α1 = αСА + β1 - 180°; α2 = αDВ + β2 + 180°;
3. Написать два соотношения согласно приращениям координат
- для линии AP: Y – Y A = tg α1· ( X ‒ XA ),
(13.10)
-для линии BP: Y – Y В = tg α2· ( X – X В).
4.Вычислить искомые координаты точки Р
Х= ХА + [(YВ ‒YА) ‒ (ХА ‒ ХС) tg α2 ] /(tg α1 ‒ tg α2);
(13.11)
Y = YА + ( X – X А) tg α1.
Частным случаем прямой угловой засечки считают тот случай, когда углы β1
и β2 измерены относительно направлений AB и BA базиса АВ (рис. 13.8)
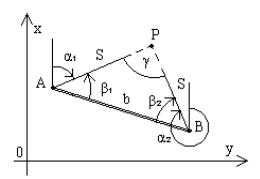
Рис. 13.8. Прямая угловая засечка от базиса
Для данного случая прямой угловой засечки порядок решения при этом будет такой:
1. Решить обратную задачу между пунктами A и B и получить дирекционный угол αAB и длину линии АВ.
2. Вычислить угол γ при вершине P, называемый углом засечки,
γ = 180º ‒ ( β1 |
+ β2) . |
(13.12) |
3. Используя теорему синусов для треугольника APB имеем: |
||
b/ sinγ = S1 / sin β2 |
= S2 / sin β1, |
(13.13) |
вычисляем длины линий S1 = (b/ sinγ) sin β2; S2 = (b/ sinγ) sin β1. |
||
4. Находим дирекционные углы линий АР и ВР |
|
|
α1 = αАВ – β1; |
α2 = αВА + |
β2 ‒ 360º. |
(13.14)
5. Решая прямые задачи от пунктов А и В к пункту Р дважды находим его координаты.
13.5.2. Обратная угловая засечка
Обратной угловой засечкой называют способ определения координат точки P
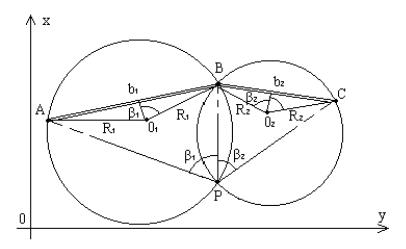
по двум |
углам β1 и β2, измеренным на определяемой точке P между на- |
|
правлениями на три пункта |
A, B, C с известными координатами (рис. |
|
13.9). |
|
|
Графическое решение. Приведем способ Болотова графического решения обратной засечки. На листе прозрачной бумаги (кальки) нужно построить углы β1 и β2 с общей вершиной P; затем наложить кальку на чертеж и, перемещая ее, добиться, чтобы направления сторон углов на кальке проходили через пункты A, B, C на чертеже; затем переколоть точку P с кальки на чертеж.
Аналитическое решение. Аналитическое решение обратной угловой засечки предусматривает ее разложение на более простые задачи, например, на 2 прямых угловых засечки и одну линейную, или на 3 линейных засечки и т.д. Известно более 10-ти способов аналитического решения, но мы рассмотрим только один - через последовательное решение трех линейных засечек.
Предположим, что положение точки P известно, и проведем две окружности: одну радиусом R1 через точки A, B и P и другую радиусом R2 через точки B, C и P
(рис. 13.9).
Радиусы эти равны |
|
|
R1 = b1 / 2 sin β1; |
R2 = b2 / 2 sin β2; |
(13.15) |
Если координаты центров окружностей - точек O1 и O2 будут известны, то координаты точки P можно определить по формулам линейной засечки: из точки O1
по расстоянию R1 и из точки O2 ‒ по расстоянию R2.
Рис. 13.9. К теории обратной угловой засечки.
Координаты центра O1 можно найти по формулам линейной засечки из точек A
и B |
по расстояниям R1, причем из двух решений нужно взять то, которое |
||
соответствует величине угла β1: если β1 > 90º, |
то точка О1 находится справа от |
||
линии АВ, если β1 < 90º, то точка О1 находится слева от линии АВ. |
|
||
|
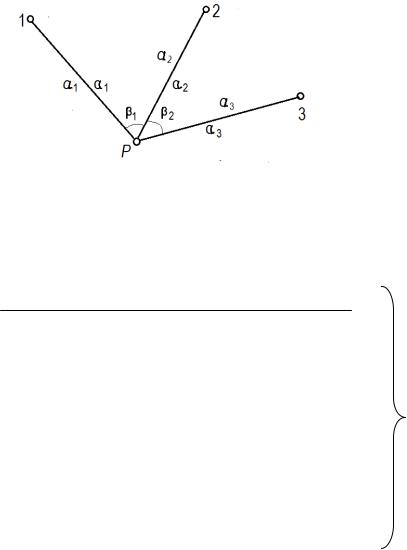
Приведем без вывода следующие известные формулы (13.16) последователь- |
||
ности решения обратной угловой засечки |
по определению |
координат |
|
пункта Р согласно схеме рис. 13.10 относительно исходных пунктов 1, |
2, 3. |
||
Рис. 13.10. Обратная угловая засечка к формулам (13.15)
Формулы (13.16) используются в такой последовательности:
|
|
(Y2 – |
Y1) ctg β1 + (Y1 – |
Y3) ctg β2 + (Х3 – |
Х2) |
|
|
1. |
tg α1 = |
Х1) ctg β1 + (Х1 – |
Х3) ctg β2 ‒ (Y3 – |
; |
|
||
|
|
(Х2 – |
Y2) |
|
|||
2. |
α2 = α1 + β1; |
α3 = α2 + β2; |
|
|
|||
3. |
(ХР – |
Х3) = [(Х1 – |
Х3) tg α1 ‒ (Y1 – Y3)] / (tg α1 ‒ tg α2); |
(13.16) |
|||
4. |
(ХР – |
Х1) = [(Х1 – |
Х3) tg α3 ‒ (Y1 – Y3)] / (tg α1 ‒ tg α3); |
|
|||
5. |
(YР – Y3) = [(ХР – Х3) tg α3; (YР – Y1) = [(ХР – Х1) tg α1; |
|
|||||
6. |
Контроль: |
tg α2 = (Y1 – Y3) / (Х2 – Х1). |
|
|
|||
13.6 . Понятие о спутниковом определении координат пунктов съемочного обоснования
Спутниковые методы геодезического позиционирования (определения координат геодезических пунктов) рассматриваются отдельно. Такие методы все боле широко используются при определении координат пунктов съемочного обоснования при всех видах топографических съемок и входят в современные их технологии. При этом отпадают трудоемкие работы по определению координат пунктов съемочного обоснования сложными и трудоемкими геодезическими методами, частично рассмотренными в лекционном материале по теме № 13. Однако инже- нер-геодезист должен их знать и при необходимости использовать на практике.